线性系统的稳态误差计算
- 格式:ppt
- 大小:1.57 MB
- 文档页数:38
3.6线性系统的稳态误差一个稳定的系统在典型外作用下经过一段时间后就会进入稳态,控制系统的稳态精度是其重要的技术指标。
稳态误差必须在允许范围之内,控制系统才有使用价值。
例如,工业加热炉的炉温误差超过限度就会影响产品质量,轧钢机的辊距误差超过限度就轧不出合格的钢材,导弹的跟踪误差若超过允许的限度就不能用于实战,等等。
控制系统的稳态误差是系统控制精度的一种度量,是系统的稳态性能指标。
由于系统自身的结构参数、外作用的类型(控制量或扰动量)以及外作用的形式(阶跃、斜坡或加速度等)不同,控制系统的稳态输出不可能在任意情况下都与输入量(希望的输出)一致,因而会产生原理性稳态误差。
此外,系统中存在的不灵敏区、间隙、零漂等非线性因素也会造成附加的稳态误差。
控制系统设计的任务之一,就是尽量减小系统的稳态误差。
对稳定的系统研究稳态误差才有意义,所以计算稳态误差应以系统稳定为前提。
通常把在阶跃输入作用下没有原理性稳态误差的系统称为无差系统;而把有原理性稳态误差的系统称为有差系统。
本节主要讨论线性系统原理性稳态误差的计算方法,包括计算稳态误差的一般方法,静态误差系数法和动态误差系数法。
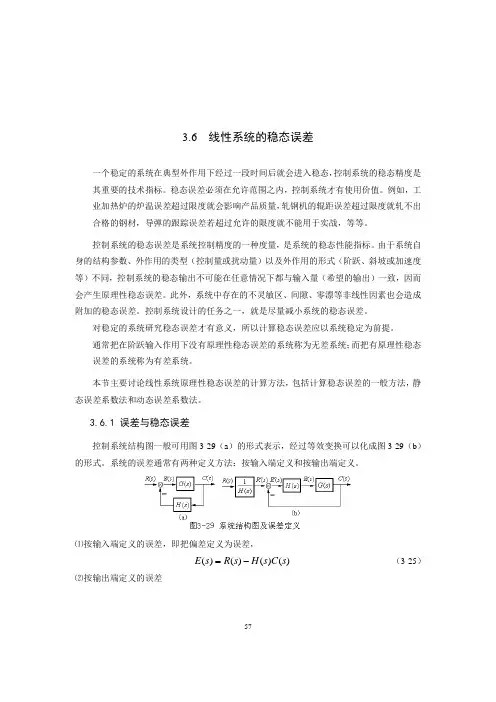
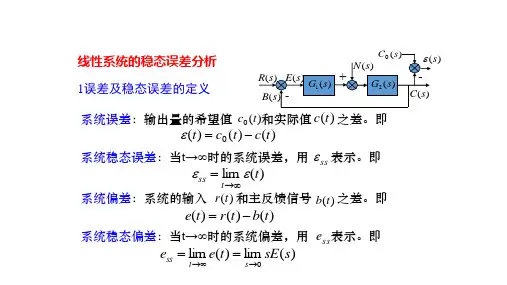
3.6.1 误差与稳态误差控制系统结构图一般可用图3-29(a)的形式表示,经过等效变换可以化成图3-29(b)的形式。
系统的误差通常有两种定义方法:按输入端定义和按输出端定义。
⑴按输入端定义的误差,即把偏差定义为误差,Hsss=(3-25)E-RC)()(s())(⑵按输出端定义的误差5758)()()()(s C s H s R s E -=' (3-26)按输入端定义的误差)(s E (即偏差)通常是可测量的,有一定的物理意义,但其误差的理论含义不十分明显;按输出端定义的误差)(s E '是“希望输出”)(s R '与实际输出)(s C 之差,比较接近误差的理论意义,但它通常不可测量,只有数学意义。
两种误差定义之间存在如下关系:)()()(s H s E s E =' (3-27) 对单位反馈系统而言,上述两种定义是一致的。
3-6 线性系统的稳态误差计算把在阶跃函数作用下没有原理性稳态误差的系统,称为无差系统;把具有原理性稳态误差的系统称为有差系统。
非线性因素引起的系统稳态误差称为附加稳态误差,或结构性稳态误差。
习惯上常把系统在阶跃输入作用下的稳态误差称为静差。
因而,0型系统可称为有(静)差系统或零阶无差度系统,一型系统可称为一阶无差度系统,二型系统可称为二阶无差度系统。
4-3 广义根轨迹2、附加开环零点的作用增加开环零点也就是增加了闭环零点,闭环零点对系统性能的影响,相当于减小闭环系统的阻尼,从而使系统的过渡过程有出现超调的趋势,并且这种作用将随闭环零点接近坐标原点的强度而加强。
4-4 系统性能的分析1、 闭环零极点与时间响应经验指出,如果闭环零、极点之间的距离比它们本身的模值小一个数量级,则这一对闭环零、极点就构成了偶极子。
在略去偶极子和非主导零、极点的情况下,闭环系统的根轨迹增益常会发生改变,必须注意核算,否则将导致性能的估算错误。
闭环系统零、极点位置对时间响应性能的影响,可以归纳为以下几点:(1) 稳定性。
如果闭环极点全部位于s 左半平面,则系统一定是稳定的,即稳定性只与闭环极点位置有关,而与闭环零点位置无关。
(2) 运动形式。
如果闭环系统无零点,且闭环极点均为实数极点,则时间响应一定是单调的;果闭环极点均为复数极点,则时间响应一般是振荡的。
(3) 超调量。
超调量主要取决于闭环复数主导极点的衰减率1//d σωξ=,并与其他闭环零、极点接近坐标原点的程度有关。
(4) 调节时间。
调节时间主要取决于最靠近虚轴的闭环复数极点的实部绝对值1n σξω= ;如果实数极点距虚轴最近,并且它附近没有实数零点,则调节时间主要取决于该实数极点的模值。
(5) 实数零、极点影响。
零点减小系统阻尼,使峰值时间提前,超调量增大;极点增大系统阻尼,使峰值时间滞后,超调量减小。
它们的作用,随着其本身接近坐标原点的程度而加强。
(6) 偶极子及其处理。
实验四 线性定常系统的稳态误差一、实验目的1.通过本实验,理解系统的跟踪误差与其结构、参数与输入信号的形式、幅值大小之间的关系;2.研究系统的开环增益K 对稳态误差的影响。
二、实验原理控制系统的方框图如图4-1所示。
其中G(S)为系统前向通道的传递函数,H(S)为其反馈通道的传递函数。
图4-1 控制系统的方框图由图4-1求得)()()(11)(S R S H S G S E +=(4-1)由上式可知,系统的误差E(S)不仅与其结构和参数有关,而且也与输入信号R(S)的形式和大小有关。
如果系统稳定,且误差的终值存在,则可用下列的终值定理求取系统的稳态误差:)(lim 0S SE e s ss →=(4-2)本实验就是研究系统的稳态误差与上述因素间的关系。
下面叙述0型、I 型、II 型系统对三种不同输入信号所产生的稳态误差ss e 。
1.0型二阶系统设0型二阶系统的方框图如图4-2所示。
根据式(4-2),可以计算出该系统对阶跃和斜坡输入时的稳态误差:图4-2 0型二阶系统的方框图● 单位阶跃输入(sS R 1)(=) 3112)1.01)(2.01()1.01)(2.01(lim 0=⨯+++++⨯=→S S S S S S e S ss (4-3) 输入输出响应曲线如图4-1所示,仿真图如图4-2所示。
图4-3 0型系统阶跃响应稳态误差响应曲线 图4-4 Matlab 仿真曲线由 Matlab 仿真结果来看,输入为单位阶跃信号时,输出稳态误差近似为0.33,符合 4-3式计算的理论值。
● 单位斜坡输入(21)(sS R =) ∞=⨯+++++⨯=→2012)1.01)(2.01()1.01)(2.01(lim SS S S S S e S ss (4-4)输入输出响应曲线如图4-3所示,仿真图如图4-4所示。
图4-5 0型系统斜坡响应稳态误差响应曲线 图4-6 Matlab 仿真曲线由 Matlab 仿真结果来看,输入为单位阶跃信号时,输出稳态误差趋于无穷大,符合4-5式理论计算值。