自相关函数与偏自相关函数
- 格式:doc
- 大小:414.00 KB
- 文档页数:11
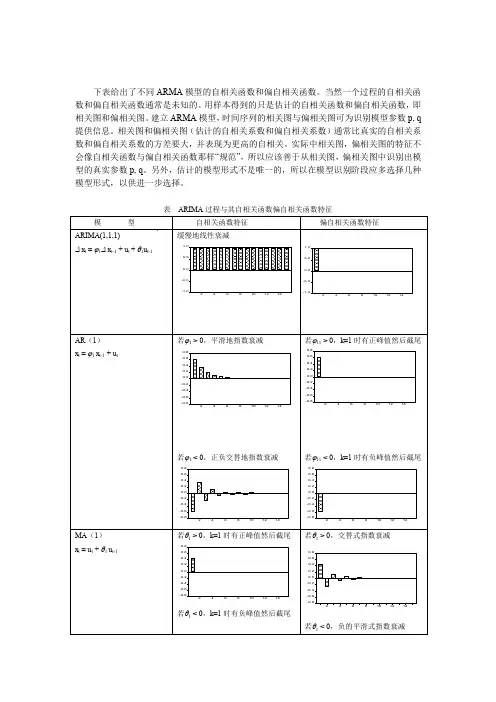
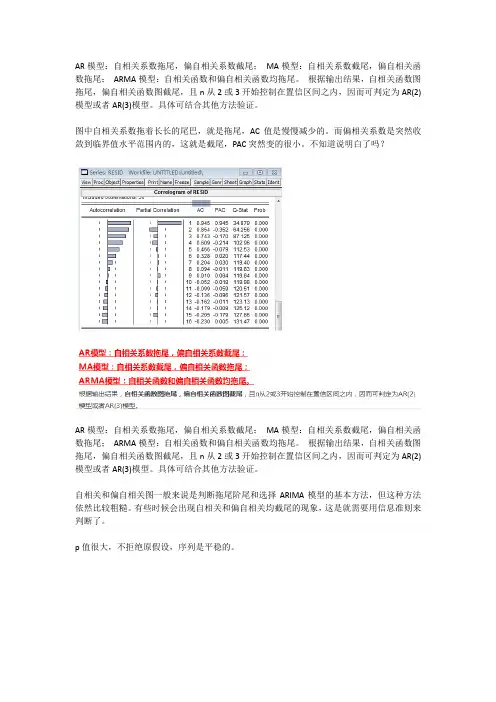
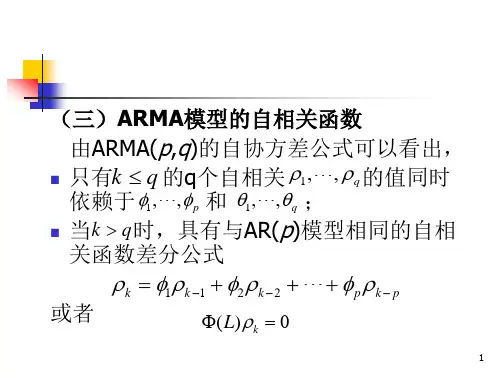
AR模型:自相关系数拖尾,偏自相关系数截尾;MA模型:自相关系数截尾,偏自相关函数拖尾;ARMA模型:自相关函数和偏自相关函数均拖尾。
根据输出结果,自相关函数图拖尾,偏自相关函数图截尾,且n从2或3开始控制在置信区间之内,因而可判定为AR(2)模型或者AR(3)模型。
具体可结合其他方法验证。
图中自相关系数拖着长长的尾巴,就是拖尾,AC值是慢慢减少的。
而偏相关系数是突然收敛到临界值水平范围内的,这就是截尾,PAC突然变的很小。
不知道说明白了吗?
AR模型:自相关系数拖尾,偏自相关系数截尾;MA模型:自相关系数截尾,偏自相关函数拖尾;ARMA模型:自相关函数和偏自相关函数均拖尾。
根据输出结果,自相关函数图拖尾,偏自相关函数图截尾,且n从2或3开始控制在置信区间之内,因而可判定为AR(2)模型或者AR(3)模型。
具体可结合其他方法验证。
自相关和偏自相关图一般来说是判断拖尾阶尾和选择ARIMA模型的基本方法,但这种方法依然比较粗糙。
有些时候会出现自相关和偏自相关均截尾的现象,这是就需要用信息准则来判断了。
p值很大,不拒绝原假设,序列是平稳的。
acf自相关函数与pacf偏相关函数自相关函数(ACF)和偏自相关函数(PACF)是用于分析时间序列数据的常用工具。
它们可以帮助我们查看时间序列数据的自相关和偏相关关系,以及确定其潜在的AR(自回归)和MA(移动平均)模型。
首先,自相关函数(ACF)是一种用于衡量时间序列与其自身在不同时间点延迟之间的相关性的方法。
它计算了时间序列在每个滞后值上的相关系数。
ACF绘制的图形可以帮助我们确定时间序列是否存在任何自相关关系。
如果acf图显示出在滞后值上的相关系数在一个特定范围内没有显著性,则说明时间序列是平稳的。
ACF图通常以延迟(lag)为横轴,相关系数为纵轴。
其次,偏自相关函数(PACF)是一种将时间序列在一些滞后值上的相关性表达为控制其他滞后值干扰的方法。
与ACF不同,PACF只显示了滞后值与时间序列之间的直接相关关系,而忽略了其他滞后值的影响。
PACF 绘制的图形可以帮助我们确定时间序列是否存在任何偏相关关系。
PACF 图通常以延迟(lag)为横轴,相关系数为纵轴。
ACF和PACF对于时间序列分析和建模非常重要。
通过观察ACF图,我们可以识别出时间序列是否具有滞后相关性,并确定AR模型的阶数。
如果ACF图在一些滞后值上显示出显著性相关系数,而在其他滞后值上没有显著性相关系数,则说明该时间序列可能适合用AR模型进行建模。
同时,PACF图可以帮助我们确定MA模型的阶数。
如果PACF图在一些滞后值上显示出显著性相关系数,而在其他滞后值上没有显著性相关系数,则说明该时间序列可能适合用MA模型进行建模。
需要注意的是,ACF和PACF只是帮助我们初步判断时间序列最可能的阶数,而不是确定唯一的模型。
在实际建模过程中,我们可能需要尝试多个不同的模型并进行模型拟合优度的比较。
总之,ACF和PACF是用于分析时间序列数据的重要工具。
它们可以帮助我们确定适合于时间序列的AR和MA模型的阶数,从而更好地理解和预测时间序列数据的行为。
时间序列分析是一种对一系列随时间变化的数据进行建模和分析的方法。
在时间序列分析中,自相关系数和偏自相关系数是两项重要的统计指标,用于解释时间序列数据中的相关性和趋势。
让我们来了解一下什么是自相关系数和偏自相关系数。
自相关系数是衡量一个时间序列数据与其自身滞后版本之间的相关性程度的统计量。
在时间序列分析中,我们常常会遇到数据之间存在一定的相关性,即当前时刻的数值与前几个时刻的数值之间存在相关性。
自相关系数可以帮助我们量化这种相关性的程度,从而更好地理解数据的特点和规律。
而偏自相关系数则是在控制其他滞后项的条件下,单独衡量当前时刻数据与之前某个特定时刻数据之间的相关性。
它能够更准确地描述时间序列数据之间的直接影响关系,帮助我们更清晰地分析数据的趋势和变化规律。
在实际应用中,自相关系数和偏自相关系数广泛用于金融、经济、气象等领域的时间序列分析和预测中。
在金融领域,投资者需要对股票价格或汇率等时间序列数据进行分析和预测,以指导投资决策。
而在气象领域,气象学家需要对气温、降水量等时间序列数据进行分析和预测,以指导灾害防范和农业生产等工作。
自相关系数和偏自相关系数的计算和解释,对于理解数据的规律和趋势,以及进行准确的预测和决策具有重要意义。
接下来,让我们来深入探讨时间序列数据中的自相关系数和偏自相关系数。
对于时间序列数据的自相关性分析,我们可以采用自相关函数(ACF)和偏自相关函数(PACF)来进行。
自相关函数反映了不同滞后阶数下,数据之间的自相关程度。
而偏自相关函数则是在排除了中间滞后项的影响后,直接反映了数据之间的偏自相关程度。
通过观察和解释自相关函数和偏自相关函数的图形,我们可以更直观地了解数据的自相关性和直接影响关系,有助于挖掘时间序列数据中的潜在规律和特征。
在对时间序列数据进行自相关系数和偏自相关系数的分析时,我们要注意一些常见的问题和误区。
我们要警惕数据中的季节性和周期性对自相关系数和偏自相关系数的影响。
平稳时间序列的判断条件平稳时间序列是指在时间维度上具有平稳性的序列,即其统计特性不随时间的推移而发生变化。
平稳时间序列的判断条件包括以下几个方面:1. 均值平稳:时间序列的均值不随时间的推移而发生变化。
2. 方差平稳:时间序列的方差不随时间的推移而发生变化。
3. 自相关函数平稳:时间序列的自相关函数只与时间间隔有关,而与时间的起点无关。
4. 偏自相关函数平稳:时间序列的偏自相关函数只与时间间隔有关,而与时间的起点无关。
如果一个时间序列满足以上四个条件,则可以认为它是平稳时间序列。
在实际应用中,可以通过计算时间序列的均值、方差、自相关函数和偏自相关函数来判断其是否平稳。
如果一个时间序列不满足平稳条件,可以考虑以下几种处理方法:1. 差分法:对时间序列进行差分处理,即计算相邻两个时间点之间的差值。
通过多次差分,可以将非平稳时间序列转化为平稳时间序列。
例如,对于一个非平稳的时间序列 $X_t$,可以计算其一阶差分 $D(X_t) = X_t - X_{t-1}$,如果一阶差分仍然不平稳,可以继续计算二阶差分、三阶差分等,直到得到一个平稳的时间序列。
2. 季节性调整:如果时间序列存在季节性波动,可以使用季节性调整方法将季节性因素去除,从而使时间序列变得平稳。
季节性调整方法包括季节性指数平滑法、季节性差分法等。
3. 单位根检验:可以使用单位根检验来判断时间序列是否存在单位根。
如果时间序列存在单位根,则说明它是非平稳的;如果不存在单位根,则说明它是平稳的。
常用的单位根检验方法包括ADF 检验、PP 检验等。
4. 模型拟合:如果时间序列不满足平稳条件,可以尝试使用非平稳时间序列模型进行拟合,如自回归求和移动平均(ARIMA)模型、广义自回归条件异方差(GARCH)模型等。
这些模型可以捕捉时间序列的非平稳特征,从而更好地描述时间序列的变化规律。
需要根据具体情况选择合适的处理方法,以便更好地分析和预测时间序列。
MATLAB是一款功能强大的数学软件,广泛应用于科学计算、工程仿真、数据分析等领域。
自相关和偏相关是在时间序列分析中常用的统计方法,用于研究数据点之间的相关性和相关程度。
下面将分别对MATLAB中的自相关和偏相关进行详细介绍。
一、自相关1. 自相关的概念自相关是一种用于衡量时间序列数据中各个数据点之间相关性的统计方法。
在MATLAB中,自相关函数可以通过调用`autocorr`来实现。
自相关函数的输出结果为数据序列在不同滞后期下的相关系数,从而可以分析出数据在不同时间点上的相关程度。
2. 自相关的计算方法在MATLAB中,通过调用`autocorr`函数可以很方便地计算出时间序列数据的自相关系数。
该函数的语法格式为:```[r,lags] = autocorr(data,maxLag)```其中,`data`为输入的时间序列数据,`maxLag`为最大滞后期。
函数会返回计算得出的自相关系数数组`r`以及对应的滞后期数组`lags`。
3. 自相关的应用自相关函数可以用于分析时间序列数据中的周期性和趋势性,帮助我们了解数据点之间的相关关系。
通过自相关函数的计算和分析,我们可以找出数据序列中的周期模式,预测未来的趋势变化,以及识别数据中的潜在规律。
二、偏相关1. 偏相关的概念偏相关是用来衡量时间序列数据中两个数据点之间相关性的统计指标,消除了滞后效应对相关性的影响。
在MATLAB中,可以使用`parcorr`函数来计算偏相关系数。
偏相关系数可以帮助我们更准确地分析数据点之间的相关关系,找到数据中的特征和规律。
2. 偏相关的计算方法在MATLAB中,通过调用`parcorr`函数可以计算出时间序列数据的偏相关系数。
函数的语法格式为:```[acf,lag] = parcorr(data,maxLag)其中,`data`为输入的时间序列数据,`maxLag`为最大滞后期。
函数会返回计算得出的偏相关系数数组`acf`以及对应的滞后期数组`lag`。
主题:ma3的自相关函数和偏自相关函数内容:1. 概述1.1 ma3模型简介1.2 自相关函数和偏自相关函数的定义2. ma3模型的自相关函数2.1 自相关函数的概念2.2 ma3模型的自相关函数计算方法2.3 实例分析:利用ma3模型计算自相关函数3. ma3模型的偏自相关函数3.1 偏自相关函数的概念3.2 ma3模型的偏自相关函数计算方法3.3 实例分析:利用ma3模型计算偏自相关函数4. ma3模型的自相关函数与偏自相关函数分析4.1 自相关函数与偏自相关函数在时间序列分析中的作用4.2 ma3模型的自相关函数与偏自相关函数的特点4.3 实例分析:利用ma3模型的自相关函数与偏自相关函数进行预测5. 总结我们先来概括一下ma3模型的特点。
ma3模型是一种常用的时间序列分析模型,它具有一定的参数特性和预测能力。
在实际应用中,我们常常需要利用ma3模型来分析时间序列数据,并通过自相关函数和偏自相关函数来评估模型的拟合程度和预测能力。
我们需要了解自相关函数和偏自相关函数的概念。
自相关函数是用来衡量时间序列数据中各个时刻点之间的相关程度,它可以帮助我们了解数据的周期性和趋势性。
而偏自相关函数则是在控制其他时刻点的影响下,衡量时间序列数据中某一时刻点与其自身的相关程度,其作用在于帮助我们消除时间序列数据中的干扰因素,更准确地评估时间序列数据的相关性。
接下来,我们将分别介绍ma3模型的自相关函数和偏自相关函数的计算方法,并通过实例分析来加深我们对这两个函数的理解。
在最后的部分,我们将对ma3模型的自相关函数和偏自相关函数进行综合分析,通过实例来展示我们如何利用这些函数来进行时间序列数据的预测和分析。
在时间序列分析中,ma3模型的自相关函数和偏自相关函数是非常重要的工具。
通过对这些函数的理解和运用,我们可以更准确地评估时间序列数据的相关性和预测能力,为实际应用提供更可靠的依据。
4. ma3模型的自相关函数与偏自相关函数分析4.1 自相关函数与偏自相关函数在时间序列分析中的作用自相关函数和偏自相关函数在时间序列分析中扮演着重要的角色。

【自相关函数与偏自相关函数的却别】对于一个平稳AR(p)模型,求出滞后k自相关系数p(k)时,实际上得到并不是x(t)与x(t-k)之间单纯的相关关系。
因为x(t)同时还会受到中间k-1个随机变量x(t-1)、x(t-2)、……、x(t-k+1)的影响,而这k-1个随机变量又都和x(t-k)具有相关关系,所以自相关系数p(k)里实际掺杂了其他变量对x(t)与x(t-k)的影响。
为了能单纯测度x(t-k)对x(t)的影响,引进偏自相关系数的概念。
对于平稳时间序列{x(t)},所谓滞后k偏自相关系数指在给定中间k-1个随机变量x(t-1)、x(t-2)、……、x(t-k+1)的条件下,或者说,在剔除了中间k-1个随机变量x(t-1)、x(t-2)、……、x(t-k+1)的干扰之后,x(t-k)对x(t)影响的相关程度。
【Box-Ljung检验】是对白噪声的检验,一般认为如果到12阶都是白噪声则认定该时间序列为白噪声序列。
【白噪声序列】按定义就是平稳的。
但现实中的数据并不是绝对的非平稳或平稳的。
我觉得你的数据可能介于平稳和非平稳之间,所以不同的统计技术会有不同的结论。
个人建议还是做一次差分吧,如果差分不会影响你的计量模型太多的话。
不客气。
计量经济与时间序列_时间序列分析的⼏个基本概念(⾃相关函数,偏⾃相关函数等)1. 在时间序列分析中,数学模型是什么?数学公式⼜是什么?数学推导过程⼜是什么?... ... ⼀句话:⽤数学公式后者符号来表⽰现实存在的意义。
数学是“万⾦油”的科学,它是作为⼯作和分析⽅法运⽤到某个学科当中。
⽐如在物理学中,数学公式或者数学符号也是表⽰现实存在的意义,G表⽰重⼒,再⽐如⽤什么表⽰分⼦,这些东西都是现实存在,⽽通过在数学层⾯的公式计算或者推导,就能够得到某种结果反推到现实中存在的意义是否准确。
说⽩了是把现实的意义符号化和简单化的表⽰出来。
2. 时间序列分析属于计量经济学的⼀个分⽀。
我们知道计量经济学的分析⼿段主要来⾃于统计学和线性代数。
因此时间序列作为⼀组数据集合,也是具有其他学科所共有分析数据结构的⽅法和其⾃⾝特有的分析数据结构的⽅法。
3. 通⽤的⼏个基本概念:均值、⽅差、标准差、协⽅差、⾃相性。
⼀组数据需要观察的话,我们需要了解⼀下他们的组成结构,正如我们要了解原⼦、分⼦、电⼦等的结构⼀个道理。
3.1 数据结构现象1:均值 现实存在意义:均值也叫期望(expect),其实专业点⼉讲叫期望,也就是个专有名词和普通叫法的区别。
这个知道就⾏了。
显⽰存在的意义可以理解为,⼀堆数据集合,各⾃有⼀种内在动⼒趋于某种东西,就像地球上的任何物体都趋于地⼼⼀样。
这种趋于的⽬标叫“期望”(佛学中讲叫⾃求),都具有这种趋势。
数学符号表达: 备注:在时间序列中,很多时候⽤µ来表⽰期望的这种现实存在意义。
要记住这些符号,到再次遇到的时候就能知道是什么现实存在意义,不容易搞混和摸不着头脑。
3.2 数据结构现象2:⽅差 现实存在的意义:如果数据集合的这条序列有且只有⼀条,就像⼀条蛇或者射线⼀样,有且只有⾃⼰的这⼀组。
就存在⼀个东西叫⽅差。
⽅:是平⽅的意思;差:指的是差距。
我们知道了“期望”之后,虽然都趋于期望,但是每⼀个数据距离期望的差距怎么表⽰,就跟每个省市距离北京的差距的平均在什么⽔平线上。
一.时间序列分析的相关概念♦随机过程:若对于每一个特定的t ∈T ,X(t)是一个随机变量,则称这一族无穷多个随机变量{X(t),t ∈T}是一个随机过程。
♦纯随机过程:随机过程X(t)(t=1,2,…),如果是由一个不相关的随机变量序列构成的,即对于所有s ≠t ,随机变量X t 和X s 的协方差均为零,则称其为纯随机过程。
♦♦♦♦独立增量随机过程:任意两相邻时刻上的随机变量之差是相互独立的,则称其为独立增量随机过程。
二阶矩过程:若随机过程{X(t),t ∈T},对每个t ∈T ,X(t)的均值和方差存在,则称其为二阶矩过程。
正态过程:若{X(t)}的有限维分布都是正态分布,则称{X(t)}为正态随机过程。
平稳过程(严平稳):如果对于时间t 的任意n 个值t 1,t 2,…,t n 和任意实数 ,随机过程X(t)的n 维分布函数满足关系式F n (x 1,x 2,…,x n ; t 1,t 2,…,t n ) = F n (x 1,x 2,…,x n ; t 1+ε,t 2+ε,…,t n+ε),则称X(t)为平稳过程。
即是统计特性不随时间的平移而变化的过程。
♦宽平稳:若随机过程{X(t),t ∈T}的均值和协方差存在,且满足①EX t ∈a,∀t ∈T ;②E[X t+τ-a][X t -a]=R(τ),∀t,t+τ∈T ,则称{X(t),t ∈T}为宽平稳随机过程,R(τ)为X(t)的协方差函数。
♦非平稳随机过程:不具有平稳性的过程就是非平稳过程。
即序列均值或协方差与时间有关时,就可以认为是非平稳的。
♦♦自相关:指时间序列观察资料互相之间的依存关系。
动态性(记忆性):指系统现在的行为与其历史行为的相关性。
如果某输入对系统后继n 个时刻的行为都有影响,就说该系统具有n 阶动态性。
二.刻画时间序列统计特性的各种数字特征的定义、性质等♦均值函数其中,F t (x)为随机序列X t 的分布密度函数。
自相关函数(ACF)和偏自相关函数(PACF)是时间序列分析中常用的工具,用于分析时间序列数据的自相关性和偏相关性。
它们是帮助我们理解时间序列数据性质的重要指标,包括其随时间的变化和趋势。
在本文中,我们将讨论MA(移动平均)过程在ACF和PACF中的特征,以帮助读者更好地理解这一概念。
1. MA过程简介移动平均过程(MA)是一种常见的时间序列模型,用于描述时间序列数据的随机变动。
MA过程的特点是序列中的每个观测值都是由一个随机干扰项和之前几个时期的干扰项的线性组合所决定。
MA过程的一阶表示为:y_t = μ + ε_t + θ_1 * ε_(t-1),其中y_t为时间t的观测值,μ为均值,ε_t为白噪声干扰项,θ_1为MA参数。
2. ACF的特征自相关函数(ACF)是用来衡量时间序列数据自相关性的函数,它可以帮助我们找到序列中不同时间点的观测值之间的相关性。
对于MA过程,ACF有以下特征:- ACF在滞后k大于MA阶数q时截尾。
MA过程的ACF在滞后k大于MA阶数q时会截尾为0,这是因为移动平均项与时间序列不同滞后期的相关性近似为0。
- ACF在滞后k小于等于MA阶数q时有非零值。
MA过程的ACF在滞后k小于等于MA阶数q时会有非零值,表示时间序列不同滞后期的相关性。
3. PACF的特征偏自相关函数(PACF)是用来衡量时间序列数据偏相关性的函数,它可以帮助我们找到序列中不同时间点的观测值之间的偏相关性。
对于MA过程,PACF有以下特征:- PACF在滞后k大于MA阶数q时有非零值。
MA过程的PACF在滞后k大于MA阶数q时会有非零值,表示时间序列不同滞后期的偏相关性。
- PACF在滞后k大于MA阶数q时截尾。
MA过程的PACF在滞后k 大于MA阶数q时会截尾为0,表示与时间序列的偏相关性近似为0。
总结通过以上分析,我们可以知道,在MA过程中,ACF在滞后k大于MA阶数q时截尾,而在滞后k小于等于MA阶数q时有非零值;PACF在滞后k大于MA阶数q时有非零值,而在滞后k大于MA阶数q时截尾。
自相关通俗理解
一、什么是自相关
自相关(Autocorrelation),又称为自相关函数,是描述一个时间序列在不同时间滞后之间的相关性的统计量,它主要用于分析连续数据点之间的关系,以便弄清数据的结构、关系,以及建立数据模型,常用于统计分析中。
二、自相关的用例
自相关用于分析数据在不同时间点之间的相关性,常用于预测经济走势、电力系统的震荡、疾病模型预测,用于测验样本的随机性以及多元回归分析中的多重共线性检验等。
三、自相关的计算
自相关是由特定的自相关函数(ACF)和偏自相关函数(PACF)来计算的,自相关函数用于表示任意时刻与某一时刻之前的滞后时间的相关性,偏自相关函数用于表示任意时刻与某一时刻之前的滞后时间之间的非线性相关性。
四、自相关的应用
1. 用于预测:自相关技术可以用来预测未来趋势、潜在的变化点。
通过分析不同时间点之间的自相关性,可以推断出未来发展的方向,给出未来的预测结果,为企业决策提供参考依据。
2. 用于模型建立:自相关技术可以用来研究不同时间点之间的联系,分析数据的结构和关系,建立有效的模型,以确保模型能够更好地拟合和预测数据。
3. 用于风险控制:自相关技术可以用来识别时间序列可能存在的超出正态分布以外的特殊变异,从而可以避免风险,提高企业的财务效益。
时间序列中自相关与偏相关函数分析Ξ于宁莉 易东云 涂先勤(国防科学技术大学数学与系统科学系,长沙,410073)摘 要 相关函数表现出时间序列中任意两个值之间的相关性是如何随着时间间隔而改变的.自相关函数刻画了时间序列相邻变量之间的相关性,偏相关函数则是排除了其它中间变量的影响,真实地反映两个变量之间的相关性,并且二者紧密相连.同时两个相关图所反映的信息在时间序列分析各个方面发挥着关键作用.关键词 自相关函数 偏相关函数 时间序列Analyze Auto -correlation s and Parti al -correlation sFunction i n ti m e Ser iesYu N ingli Y i Dongyun T u X iaoqin(N ati onal U niversity of D efense T echno logy ,Changsha ,410073)Abstract Co rrelati ove functi on reflacts how does the co rrelati on of the every tw o value in the ti m e series analysis very w ith the ti m e -distance .A uto -co rrelati ons functi on dep icts the co rrelati on o a value and thenearby one in the ti m e series ,but partial -co rrelati ons functi on eli m inates the affect of the o thers.Besides ,they have nearest connecti on .T he tw o co rrelative functi ons reflect mo re info r m ati ons ,they all p lay key effectsin every aspect of ti m e series analysis.Keywords auto -co rrelati ons functi on partial -co rrelati ons functi on ti m e series analysis1 自相关和偏相关函数的定义、推导方法定义1 设已有零均值平稳序列{e t }的一组观测数据e 1,e 2,…,e n ,则对r k 的有偏估计为:r ∧k =1n ∑n -k t =1e t et +k ,{r k }称为样本自协方差函数,则样本自相关函数为: {Θ∧k },Θ∧k =r ∧k r ∧0,k =0,1,2,….定义2 对于平稳时间序列{e k },k 阶偏相关函数定义为e t ,e t -k 关于e t -1,…,e t -k +1的条件相关函数 Υkk =Θe t e t -k e t -1,…e t -k +1=E (e t e t -k e t -1,…,e t -k +1)V a r (e t e t -1,…,e t -k +1),第27卷第1期2007年3月 数学理论与应用M A TH E M A T I CAL TH EOR Y AND A PPL I CA T I ON S V o l .27N o.1 M ar .2007Ξ朱健民教授推荐 收稿日期:2006年6月8日其中E ( e t -1,…,e t -k +1)是关于条件密度函数f (e t ,e t -k e t -1,…,e t -k +1)的条件期望.偏相关函数难以由定义直接计算得到,但是,由公式推导可以发现,k 阶偏相关函数即是按k 阶自回归模型对e t 作线性最小方差估计时的最后一项系数.由此可以得到计算偏相关函数的递推公式: Υk +1,k +1=Θk +1-∑kj =1Θk +1-j Υk ,j 1-∑kj =1Θj Υk ,j,(1) Υk +1,l =Υk ,l -Υk +1,k +1Υk ,k +1-l , l =1,2,…,k(2)只要一个A R (p )过程具有无限伸延的自相关函数,那么,就可由自相关函数的p 个非零函数来描述自身的特性,偏相关函数就是基于这一事实的一种描述手段.对任何平稳过程,都可以由偏相关函数 kk ,当然也都是作为过程自相关Θk 的函数,但是,对于A R (p )过程有:当k >p ,时 kk =0,这是只适合于刻划p 阶A R 过程的明显特征.定义的量 kk 称为过程{z k }滞后为k 的偏相关,这是由于 kk 事实上用来度量z t 和z t -k 之间在扣除了中间变量z t -1,z t -2…,z t -k +1的影响之后的相关(或是z t 和t -k 之间未被z t -1,z t -2,…,z -k +1所解释的相关).可以定义为: kk =co rr[z t -z ∧t ,z t -k -z ∧t -k ].例如,我们求出 11=co rr[z t ,z t -1],而 22=co rr[z t -z ∧t ,z t -k -z ∧t -k ]=Υ2-2Θ1Χ1+Θ21Χ0[(Χ0+Θ21Χ0-2Θ1Χ1)2]1 2=Θ2-Θ211-Θ21.2 自相关和偏相关函数反映的信息211 检验某一时间面序列是否平稳平稳过程的自相关系数和偏自相关系数都会以某种方式衰减趋于0,前者测度当前序列与先前序列之间简单和常规的相关程度,后者是在控制其它先前序列的影响后,测度当前序列与某一先前序列之间的相关程度,如果某一时间序列的自相关函数随着滞后k 的增加而很快地下降为0,那么我们就认为该序列为平稳序列;如果自相关函数不随着k 的增加而迅速下降为0,就表明该序列不平稳.如果一个时间序列的自相关和偏相关图没有任何模式,而且数值很小,那么该序列可能就是一些互相独立的无关的随机变量.212 识别A R 、M A 、A RM A 模型及阶数1)自回归A R (p )模型:当k >p 时,有 k =0或 k 服从渐近正态分布N (0,1 且( k >2n 12)的个数≤415◊,即平稳时间序列的偏相关系数 k 为p 步截尾,自相关系数r k 逐步衰减而不截尾,则序列是A R (p )模型.实际中,一般A R 过程的A CF 函数呈单边递减或阻尼振荡,所以用PA CF 函数判别从(p 阶开始的所有偏相关系数均为0).2)移动平均M A (q )模型:55 第1期 时间序列中自相关与偏相关函数分析当k >q 时,有自相关系数r k =0或自相关系数r k 服从N (0,1 n (1+2∑r 2i )1 2)且( r k>2 n 1 2)的个数≤415◊,即平稳时间序列的自相关系数r k 为q 步截尾,偏相关系数 k 逐步衰减而不截尾,则序列是M A (q )模型.实际中,一般M A 过程的PA CF 函数呈单边递减或阻尼振荡,所以用A CF 函数判别(从q 阶开始的所有自相关系数均为0).3)自回归移动平均A RM A (p ,q )模型:平稳时间序列的偏相关系数 k 和自相关系数r k 均不截尾,但较快收敛到0,则该时间序列可能是A RM A (p ,q )模型.实际问题中,多数要用此模型.因此建模、解模的主要工作是求解p ,q 和 ,Η的值,检验Εt 和y t 的值.4)自回归综合移动平均A R I M A (p ,d ,q )模型:平稳时间序列的偏相关系数 k 和自相关系数r k 均不截尾,且缓慢衰减收敛,则该时间序列可能是A R I M A (p ,d ,q )模型.从理论上讲,偏相关函数Υkk 的截尾性是A R 模型独有的性质;自相关函数Θk 的截尾性是M A 模型独有的性质;若Θk ,Υkk 均呈拖尾性,则属于A RM A 模型的特性.但是,在实际应用当中,并不掌握序列的自相关函数和偏相关函数,而是它们的样本值Θ∧k ,Υ∧kk 的代替,因样本值没有严格的截尾性质,这样就有一个在何种程度可认为Θ∧k ,Υ∧kk 为零的问题.可以证明,当e t 为M A (q )序列且当n 较大时,Θ∧k 渐近服从于N (0,1n (1+2∑q m =1Θ2m )),且Θ∧k ,k >M 相互独立.因此,检验Θ∧k 是否为零的问题转化为检验{Θ∧k ,k =q +1,…,q +M }落在±2n (1+2∑q m =1Θ∧2m )1 2范围内的比例是否达到了95◊的问题.这里M 在检验上一般取n 或n 10左右.若依上述方法对q =1,2,…,q 0-1均没有达到,而在q =q 0时达到了,则可认为e t 为M A 序列,且q 0为M A 阶数的初步识别值.若经过上述判断Θ∧k 不具有截尾性,则转向自相关函数Υ∧kk 的截尾性判断问题.Q uenou ille 证明了对于A R (p )过程,当k >p 且n 较大时,{Υ∧kk ,k >p }为独立序列且对每个k ,Υ∧kk 近似服从N (0,1 n ),因此,检验Υ∧kk 是否为零的问题转化为检验{Υ∧kk ,k =p +1,p +2,…,p +,}落在±21 n 范围内的比例是否达到了95◊的问题.这里M 在经验上一般取n 或n 10左右.若依上述方法对p =1,2,…,p 0-1均没有达到,而在p =p 0时达到了,则可认为e t 为A R序列,且p 0为A R 阶数的初步识别值.若经过断判,Θ∧k ,Υ∧kk 虽有衰减的趋势,但都不截尾,则应该选择A RM A 模型对量测数据进行拟和,但尚不能确定阶数.213 模型检验对序列建立模型后需要检验新建模型的合理性,若检验不通过,则调整(p ,q )的值,重新估计参数和检验,反复进行直到接受为止,才能最终确定模型形式.我们可以用相关图检验拟合后的残差是否为白噪声,若是则模型合理.因为白噪声过程是序列无关的,所以白噪声过程的自相关函数和偏相关函数在相关图中均为等于零的水平直线.214 识别时间序列的季节性在商业活动中,我们经常听到“销售旺季”或“销售淡季”这类术语.通过对现象季节变动65数学理论与应用 第27卷 的分析和研究,可以确定现象过去的季节变化规模,以作为当前生产经营活动的依据或者消除时间序列中的季节因素,以便分析其它构成因素的影响.通常,季节性的高峰和低潮可以通过直接观察时间序列而得到,然而,如果时间序列波动得厉害,季节性高峰和低潮就不那么容易地从其它波动中区分出来.在这个时候,借助于自相关函数,问题就迎刃而解了.因此通过观察自相关函数有规律的峰值可以识别季节性,甚至可识别那些由时间序列本身无法辨别的季节性峰值.3 结 论由上述分析,观察相关函数图并仔细研究它的变化规律,是我们处理时间序列时非常重要的一步,并且相关函数也给了我们比较满意的强论.在实际分析数据时,我们重视这一点将会有事半功倍之效.他们的估计值可能有较大的方差,且彼此之间可能高度相关.所以,不可能指望相关函数的估计值与理论值十分贴近,通常能对大致特性有相当的把握,更精细的特征则可能未必代表实际结果.参考文献[1] 王正明,易东云1测量数据建模与参数估计1长沙:国防科技大学出版社,19961[2] [美]Geo rge E .P .Box ,[英]Gw ilym M .Jenk ins .时间序列分析—预测与控制1北京:中国统计出版社,19971[3] 李力春1自相关函数在时间序列分析中1上海统计,20011[4] 叔 子,吴 雅1时间序列分析工程应用1武汉:华中理工大学出版社,1992175 第1期 时间序列中自相关与偏相关函数分析。
自相关函数与偏自相关函数上一节介绍了随机过程的几种模型。
实际中单凭对时间序列的观察很难确定其属于哪一种模型,而自相关函数和偏自相关函数是分析随机过程和识别模型的有力工具。
1、自相关函数定义在给出自相关函数定义之前先介绍自协方差函数概念。
由第一节知随机过程{t x }中的每一个元素t x ,t = 1, 2, … 都是随机变量。
对于平稳的随机过程,其期望为常数,用μ表示,即()t E x μ=,1,2,t=随机过程的取值将以 μ 为中心上下变动。
平稳随机过程的方差也是一个常量2()t xVar x σ=,1,2,t=2x σ用来度量随机过程取值对其均值μ的离散程度。
相隔k 期的两个随机变量t x 与t k x -的协方差即滞后k 期的自协方差,定义为:(,)[()()]k t t k t t k Cov x x E x x γμμ--==--自协方差序列:k γ,0,1,2,k=称为随机过程{t x }的自协方差函数。
当k = 0 时,20()t x Var x γσ==。
自相关系数定义:k ρ=因为对于一个平稳过程有:2()()t t k x Var x Var x σ-==所以220(,)t t k k kk x x Cov x x γγρσσγ-===,当 k = 0 时,有01ρ=。
以滞后期k 为变量的自相关系数列k ρ(0,1,2,k =)称为自相关函数。
因为k k ρρ-=,即(,)t k t Cov x x -= (,)t t k Cov x x +,自相关函数是零对称的,所以实际研究中只给出自相关函数的正半部分即可。
2、自回归过程的自相关函数 (1)平稳AR(1)过程的自相关函数 AR(1) 过程:11t t t x x u φ-=+,|φ1| < 1。
已知()0t E x =(why?)。
用t k x -同乘上式两侧t x t k x -11t t k t t k x x u x φ---=+上式两侧同取期望:k γ11k φγ-=其中()0t t k E u x -=(why?)(由于x t = u t + φ1 u t -1 + φ12u t -2 +… ,所以x t-k = u t-k + φ1u t-k-1 + φ12 u t-k-2 +…,而u t 是白噪音与其t - k 期及以前各项都不相关)。
VAR模型稳定条件:①相反的特征方程| I - ∏1L | = 0的根都在单位圆以外②特征方程 |λ I - ∏1| = 0的根都在单位圆以内高阶VAR模型稳定的条件:①相反的特征方程| I- ∏1 L - ∏2 L2 - ∏3 L3-…-∏k Lk |=0的全部根必须在单位圆以外。
②VAR模型的稳定性要求A的全部特征值,即特征方程 | A - λ I | = 0的全部根必须在单位圆以内三、概念题1、白噪声模型对于随机过程{ xt , t∈T }, 如果(1) E(xt) = 0, (2) Var(xt) = σ2 <∞, t∈T;(3) Cov(xt ,xt + k)=0, (t + k ) ∈ T , k ≠ 0 , 则称{xt}为白噪声过程。
白噪声是平稳的随机过程,因其均值为零,方差不变,随机变量之间非相关。
显然上述白噪声是二阶宽平稳随机过程。
2、宽平稳过程(1)m阶宽平稳过程。
如果一个随机过程m阶矩以下的矩的取值全部与时间无关,则称该过程为m阶宽平稳过程。
(2)二阶宽平稳过程。
如果一个随机过程{xt} E[x(t) ] = E[x(t +k)] = μ< ∞,Var[x(t)] = Var[x(t +k)] = σ 2 < ∞, Cov[x(ti ),x(tj)] =Cov[x(ti+k),x(tj+k)]=σ2i j < ∞,其中μ, σ 2 和σij2为常数,不随 t, (t∈T ); k,((tr+ k)∈T, r = i, j ) 变化而变化,则称该随机过程 {x t} 为二阶平稳过程。
该过程属于宽平稳过程。
3、随机游走(random walk)过程对于表达式xt = xt -1 + ut,如果ut为白噪声过程,则称xt为随机游走过程。
4、p阶自回归模型如果一个线性过程xt可表达为xt = φ1xt-1+ φ2xt-2+ … + φpxt-p+ ut其中φi ,i =1,…,p 是自回归参数,ut是白噪声过程,则称xt为p阶自回归过程,用AR(p)表示。
自相关与偏自相关函数的计算与解释自相关与偏自相关函数是时间序列分析中常用的工具,用于研究时间序列的相关性和相关程度。
本文将介绍它们的计算方法和解释。
一、自相关函数的计算与解释自相关函数(autocorrelation function,ACF)是衡量时间序列在不同滞后阶数上的相关性的一种统计指标。
它反映了同一时间序列在不同时间点上的相关程度。
ACF的计算方法如下:1. 将时间序列数据表示为X(t),其中t表示时间点。
2. 计算X(t)与X(t+k)的相关系数,其中k表示滞后阶数。
3. 重复步骤2,直到计算出所有滞后阶数下的相关系数。
解释ACF的结果时,通常使用图表来展示滞后阶数与相关系数之间的关系。
在图表中,横轴表示滞后阶数,纵轴表示相关系数的取值范围。
通过观察图表,可以判断时间序列数据是否存在相关性,并确定相关性的强弱。
二、偏自相关函数的计算与解释偏自相关函数(partial autocorrelation function,PACF)是衡量时间序列在某个滞后阶数上的相关性,排除了其他滞后阶数的影响。
PACF 的计算方法如下:1. 假设要计算PACF的滞后阶数为k。
2. 通过最小二乘法,拟合一个AR(k-1)模型,得到残差序列。
3. 计算残差序列与X(t+k)的相关系数,即得到PACF的值。
解释PACF的结果时,同样可以使用图表来展示滞后阶数与相关系数之间的关系。
与ACF不同的是,PACF在滞后阶数大于k时,相关系数通常趋于零,表明其他滞后阶数对于X(t+k)的相关性没有影响。
三、自相关与偏自相关函数的应用自相关与偏自相关函数在时间序列分析中有广泛的应用。
以下列举了几个常见的应用场景:1. 识别时间序列的阶数:通过观察ACF和PACF的图表,可以判断时间序列的阶数,从而选择合适的模型进行建模和预测。
2. 检验时间序列的平稳性:通过观察ACF和PACF的图表,可以判断时间序列是否满足平稳性的要求,从而决定是否需要进行平稳化处理。
自相关函数与偏自相关函数上一节介绍了随机过程的几种模型。
实际中单凭对时间序列的观察很难确定其属于哪一种模型,而自相关函数和偏自相关函数是分析随机过程和识别模型的有力工具。
1、自相关函数定义在给出自相关函数定义之前先介绍自协方差函数概念。
由第一节知随机过程{t x }中的每一个元素t x ,t = 1, 2, … 都是随机变量。
对于平稳的随机过程,其期望为常数,用μ表示,即()t E x μ=,1,2,t =L随机过程的取值将以 μ 为中心上下变动。
平稳随机过程的方差也是一个常量2()t x Var x σ=,1,2,t =L2x σ用来度量随机过程取值对其均值μ的离散程度。
相隔k 期的两个随机变量t x 与t k x -的协方差即滞后k 期的自协方差,定义为:(,)[()()]k t t k t t k Cov x x E x x γμμ--==--自协方差序列:k γ,0,1,2,k =L称为随机过程{t x }的自协方差函数。
当k = 0 时,20()t x Var x γσ==。
自相关系数定义:k ρ=因为对于一个平稳过程有:2()()t t k x Var x Var x σ-==所以220(,)t t k k kk x x Cov x x γγρσσγ-===,当 k = 0 时,有01ρ=。
以滞后期k 为变量的自相关系数列k ρ(0,1,2,k =L )称为自相关函数。
因为k k ρρ-=,即(,)t k t Cov x x -= (,)t t k Cov x x +,自相关函数是零对称的,所以实际研究中只给出自相关函数的正半部分即可。
2、自回归过程的自相关函数 (1)平稳AR(1)过程的自相关函数 AR(1) 过程:11t t t x x u φ-=+,|φ1| < 1。
已知()0t E x =(why?)。
用t k x -同乘上式两侧t x t k x -11t t k t t k x x u x φ---=+上式两侧同取期望:k γ11k φγ-=其中()0t t k E u x -=(why?)(由于x t = u t + φ1 u t -1 + φ12 u t -2 +… ,所以x t-k = u t-k + φ1 u t-k-1 +φ12 u t-k-2 +…,而u t 是白噪音与其t - k 期及以前各项都不相关)。
两侧同除 γ0 得:2111210kk k k ρφρφρφρ--====L因为ρo = 1,所以有k ρ=1kφ(0k ≥)对于平稳序列有 | φ1| < 1。
所以当 φ1为正时,自相关函数按指数衰减至零;当 φ1为负时,自相关函数正负交错地指数衰减至零。
见下图。
因为对于经济时间序列,φ1一般为正,所以第一种情形常见。
指数衰减至零的表现形式说明随着时间间隔的加长,变量之间的关系变得越来越弱。
1> φ1 > 0 -1<φ1 < 0图 AR(1) 过程的自相关函数同理,对于φ1 =1和φ1 >1情形即非平稳和强非平稳过程的自相关函数如下图。
φ1 = 1.1(强非平稳过程) φ1 = 1(随机游走过程)(2)AR(p ) 过程的自相关函数用t k x -(k > 0) 同乘平稳的 p 阶自回归过程1122t t t p t p t x x x x u φφφ---=++++L 的两侧,得:1122t k t t k t t k t p t k t p t k t x x x x x x x x x u φφφ--------=++++L对上式两侧分别求期望得:k γ1122k k p k p φγφγφγ---=+++L ,k > 0 用 γ0分别除上式的两侧得Yule-Walker 方程:ρk = φ1 ρk -1 + φ2 ρk -2 + … + φp ρk -p , k > 0令2121()1(1- )ppp ii L L L L G L φφφ=Φ=----=∏L ,其中L 为k 的滞后算子,这里1i G -,i = 1, 2, …, p 是特征方程()0L Φ=的根。
为保证随机过程的平稳性,要求1i G <。
则:121210p i i p i G G G φφφ-------=L ,也即1212k k k k p i i i p i G G G G φφφ---=+++L 。
可证:1122k k kk p p AG A G A G ρ=+++L (*)其中A i , i = 1, … ,p 为待定常数。
(提示:可把(*)式代入到Yule-Walker 方程中证明) 由(*)式知道会遇到如下几种情形。
① 当i G 为实数时,(*)式中的ki i AG 将随着k 的增加而几何衰减至零,称为指数衰减。
② 当i G 和j G 表示一对共轭复数时,设i G a bi =+,j G a bi =-,22b a += R ,则i G ,j G 的极座标形式是:(cos sin )i G R i θθ=+ (cos sin )j G R i θθ=-若AR(p ) 过程平稳,则1i G <,所以必有R <1。
那么随着k 的增加,(cos sin )k k i G R k i k θθ=+(cos sin )k k j G R k i k θθ=-自相关函数(*)式中的相应项ki G , k j G 将按正弦振荡形式衰减。
注意:实际中的平稳自回归过程的自相关函数常是由指数衰减和正弦衰减两部分混合而成。
③ 从(*)式可以看出,当特征方程的根取值远离单位圆时,k 不必很大,自相关函数就会衰减至零。
④ 有一个实数根接近1时,自相关函数将衰减的很慢,近似于线性衰减。
当有两个以上的根取值接近1时,自相关函数同样会衰减的很慢。
两个特征根为实根 两个特征根为共轭复根图AR(2) 过程的自相关函数3、移动平均过程的自相关函数 (1)MA(1) 过程的自相关函数。
对于MA(1)过程11t t t x u u θ-=+,有:1111()[()()]k t t k t t t k t k E x x E u u u u γθθ-----==++当k = 0时,01111()[()()]t t t t t t E x x E u u u u γθθ--==++22111(2)t t t t E u u u u θ--=++221(1)θσ=+当k = 1时,1111112()[()()]t t t t t t E x x E u u u u γθθ----==++2211112112()t t t t t t t E u u u u u u u θθθ-----=+++21θσ=当 k > 1 时,1111()[()()]k t t k t t t k t k E x x E u u u u γθθ-----==++21111111()t t k t t k t t k t t k E u u u u u u u u θθθ--------=+++0=综合以上三种情形,MA(1)过程自相关函数为ρk = 0γγk= 121, 110, 1k k θθ⎧=⎪+⎨⎪>θ1 > 0 θ1 < 0图 MA(1)过程的自相关函数可见MA(1) 过程的自相关函数具有截尾特征。
当k > 1时,ρk = 0。
(2) MA(q ) 过程的自相关函数 MA(q ) 过程的自相关函数是ρk = 112222212...,1,2,,1...0,k k k q k qq k q k q θθθθθθθθθθ++-++++⎧=⎪++++⎨⎪>⎩L 当k > q 时,ρk = 0,说明 ρk , k = 0, 1, … 具有截尾特征。
例如,对于MA(2) 过程,自相关函数是ρ1=22212111θθθθθ+++, ρ2=222121θθθ++, ρk = 0, k > 2。
4、 ARMA (1, 1) 过程的自相关函数ARMA (1, 1) 过程的自相关函数ρk 从 ρ1开始指数衰减。
ρ1的大小取决于 φ1和 θ1, ρ1的符号取决于 (φ1 -θ1 )。
若 φ1 > 0,指数衰减是平滑的,或正或负。
若 φ1 < 0,相关函数为正负交替式指数衰减。
对于ARMA (p , q ) 过程,p , q ≥ 2时,自相关函数的表现形式比较复杂,可能是指数衰减、正弦衰减或二者的混合衰减。
5、相关图(correlogram ,或估计的自相关函数,样本自相关函数) 对于一个有限时间序列(x 1, x 2, …, x T )用样本平均数x =T1∑=Tt tx1估计总体均值 μ,用样本方差s 2 =21)(1∑=-Tt tx xT估计总体方差σx 2。
当用样本矩估计随机过程的自相关函数,则称其为相关图或估计的自相关函数,记为 r k =C C k, k = 0, 1 , 2, …, K , ( K < T ) . r k 是对ρk 的估计。
其中C k =1T k-1()(),T k tt kt x x xx -+=--∑ k = 0, 1, 2, …, K ,是对γk 的估计。
C 0 =21)(1∑=-Tt tx xT是对γ0的估计。
T 是时间序列数据的样本容量。
实际中T 不应太小,最好能大于60。
注意:C k 为有偏估计量。
但在小样本条件下更有效。
相关图是对自相关函数的估计。
由于MA 过程和ARMA 过程中的MA 分量的自相关函数具有截尾特性,所以通过相关图可以估计MA 过程的阶数q 。
相关图是识别MA 过程阶数和ARMA 过程中MA 分量阶数的一个重要方法。
对于年度时间序列数据,相关图一般取k = 15就足够了。
k r 的方差近似为1T -。
所以在观察相关图时,若k r 的绝对值超过21T -(2个标准差),就被认为是显著地不为零。
当T 充分大时,近似有:1(0)k r T --=k r 12T ~ N (0, 1)第五节 偏自相关函数偏自相关函数是描述随机过程结构特征的另一种方法。
用 φkj 表示k 阶自回归过程中第j 个回归系数,则k 阶自回归模型表示为:1122t k t k t kk t k t x x x x u φφφ---=++++L其中kk φ是最后一个回归系数。
若把kk φ看作是滞后期k 的函数,则称kk φ,1,2,k =L 为偏自相关函数。
它由下式中的红项组成。
1111t t t x x u φ-=+2112222t t t t x x x u φφ--=++L1122t k t k t kk t k kt x x x x u φφφ---=++++L因偏自相关函数中每一个回归系数kk φ恰好表示t x 与t k x -在排除了其中间变量1t x -,2t x -,L ,1t k x -+ 影响之后的相关系数,112211t k t k t kk t k kk t k kt x x x x x u φφφφ----+-----=+L所以偏自相关函数由此得名。