Damping estimates for oscillatory integral operators with finite type singularities
- 格式:pdf
- 大小:208.27 KB
- 文档页数:17

电机阻尼系数nms计算The damping coefficient of a motor, typically denoted as nms, is a crucial parameter that characterizes the resistance of the motor to oscillatory motion. It represents the ability of the system to dissipate energy and return to a stable state after being perturbed. The calculation of the damping coefficient involves several factors that are inherent to the design and operation of the motor.电机阻尼系数nms是表征电机对振荡运动阻力的重要参数。
它代表系统耗散能量并在受到扰动后返回到稳定状态的能力。
电机阻尼系数的计算涉及多个与电机设计和运行固有的因素。
To calculate the damping coefficient of a motor, it is necessary to consider the mechanical properties of the system, including the mass and stiffness of the moving parts. Additionally, the electrical characteristics of the motor, such as inductance and resistance, also play a role in determining the damping coefficient. These factors influence the rate at which the motor dissipates energy and stabilizes after being disturbed.要计算电机的阻尼系数,需要考虑系统的机械特性,包括运动部件的质量和刚度。
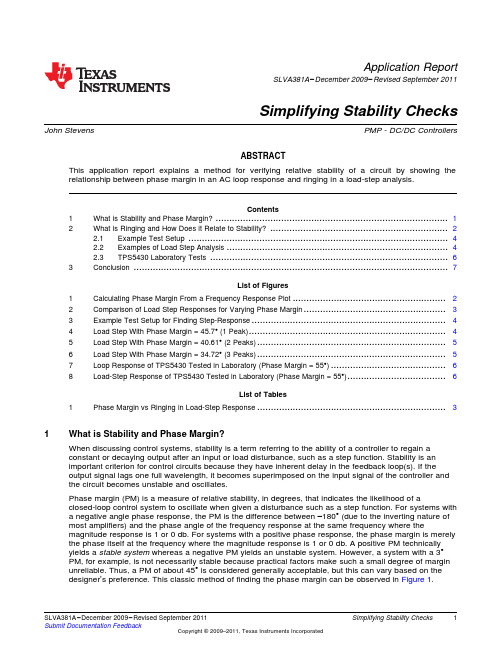
Application ReportSLVA381A–December2009–Revised September2011Simplifying Stability Checks John Stevens PMP-DC/DC ControllersABSTRACTThis application report explains a method for verifying relative stability of a circuit by showing the relationship between phase margin in an AC loop response and ringing in a load-step analysis.Contents1What is Stability and Phase Margin? (1)2What is Ringing and How Does it Relate to Stability? (2)2.1Example Test Setup (4)2.2Examples of Load Step Analysis (4)2.3TPS5430Laboratory Tests (6)3Conclusion (7)List of Figures1Calculating Phase Margin From a Frequency Response Plot (2)2Comparison of Load Step Responses for Varying Phase Margin (3)3Example Test Setup for Finding Step-Response (4)4Load Step With Phase Margin=45.7°(1Peak) (4)5Load Step With Phase Margin=40.61°(2Peaks) (5)6Load Step With Phase Margin=34.72°(3Peaks) (5)7Loop Response of TPS5430Tested in Laboratory(Phase Margin=55°) (6)8Load-Step Response of TPS5430Tested in Laboratory(Phase Margin=55°) (6)List of Tables1Phase Margin vs Ringing in Load-Step Response (3)1What is Stability and Phase Margin?When discussing control systems,stability is a term referring to the ability of a controller to regain aconstant or decaying output after an input or load disturbance,such as a step function.Stability is animportant criterion for control circuits because they have inherent delay in the feedback loop(s).If theoutput signal lags one full wavelength,it becomes superimposed on the input signal of the controller and the circuit becomes unstable and oscillates.Phase margin(PM)is a measure of relative stability,in degrees,that indicates the likelihood of aclosed-loop control system to oscillate when given a disturbance such as a step function.For systems witha negative angle phase response,the PM is the difference between–180°(due to the inverting nature ofmost amplifiers)and the phase angle of the frequency response at the same frequency where themagnitude response is1or0db.For systems with a positive phase response,the phase margin is merely the phase itself at the frequency where the magnitude response is1or0db.A positive PM technically yields a stable system whereas a negative PM yields an unstable system.However,a system with a3°PM,for example,is not necessarily stable because practical factors make such a small degree of margin unreliable.Thus,a PM of about45°is considered generally acceptable,but this can vary based on the designer’s preference.This classic method of finding the phase margin can be observed in Figure1.1 SLVA381A–December2009–Revised September2011Simplifying Stability Checks Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments IncorporatedFigure1.Calculating Phase Margin From a Frequency Response PlotAs can be seen in the plot of Figure1,an AC response,(Magnitude on top and Phase underneath),isgiven.The Magnitude Response plot is shown to be0db at15.99kHz.The phase at15.99kHz is80.88°.Thus,the phase margin of this system is80.88°.Although this method is acceptable for simulated devices,in real systems it creates many problems.For example,many devices with control systems cannot tolerate the wide range of frequencies necessary for such an analysis.Further,to conduct such a test requires an isolation of the feedback loop which in some cases is difficult or impossible.Although tools such as network analyzers can test stability directly,the cost sometimes restricts their availability.Therefore,an alternate method to test stability using a commonlaboratory oscilloscope is now considered.2What is Ringing and How Does it Relate to Stability?Ringing is the unwanted oscillation seen in a voltage or current signal when the input or load is changed very quickly.If the controller cannot correct the output properly,overshoot and/or undershoot can occur, until it is damped out according to the damping factor of the system.In the extreme case,the systembecomes unstable and the output oscillates indefinitely at the frequency where the gain=1and phase margin is0dB.In a circuit with a positive phase margin,the oscillations decay and are limited in number.Considering this,it can be stated that fewer bumps(peaks)or ripples in the transient load-step response correspond to more damping and a higher phase margin.In Figure2,this relationship can be observed.2Simplifying Stability Checks SLVA381A–December2009–Revised September2011Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments Incorporatedparison of Load Step Responses for Varying Phase Margin As Figure2illustrates,the response with the highest PM,54.08°,(in brown),damps the fastest.As PM decreases,the number of oscillatory peaks increases until eventually,at very low PM,the circuit is inlightly damped oscillation.For a quick reference,see Table1.Table1.Phase Margin vs Ringing in Load-Step ResponsePhase Margin(Degrees)Ringing(Bumps)80.88060.75057.64054.08050.16145.7 1.540.61234.72327.78419.4369.09173 SLVA381A–December2009–Revised September2011Simplifying Stability Checks Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments IncorporatedScope2.1Example Test SetupThe device under test (DUT)can be set up as seen in Figure 3Figure 3.Example Test Setup for Finding Step-Response2.2Examples of Load Step AnalysisFor a better definition of what an oscillatory bump or peak is,see Figure 4,Figure 5,and Figure 6.Figure 4.Load Step With Phase Margin =45.7°(1Peak)4Simplifying Stability ChecksSLVA381A –December 2009–Revised September 2011Submit Documentation FeedbackCopyright ©2009–2011,Texas Instruments IncorporatedFigure5.Load Step With Phase Margin=40.61°(2Peaks)Figure6.Load Step With Phase Margin=34.72°(3Peaks)5 SLVA381A–December2009–Revised September2011Simplifying Stability Checks Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments Incorporated2.3TPS5430Laboratory TestsTo verify that these simulations produce realistic results,the TPS5430was tested in a laboratory.Figure7.Loop Response of TPS5430Tested in Laboratory(Phase Margin=55°)NOTE:Uses a50%Load Step at1-10µs Slew RateFigure8.Load-Step Response of TPS5430Tested in Laboratory(Phase Margin=55°) In the laboratory test of the load-step response in Figure8,there are no oscillatory peaks.At a phasemargin of55°,this result matches what is found in Table1.6Simplifying Stability Checks SLVA381A–December2009–Revised September2011Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments Incorporated Conclusion 3ConclusionThis application report explains the link between the load-step response and the loop response of a given circuit.Based on this relationship,this document provides details to make an estimate at relative stability based on phase margin.The designer must always consider that this measurement requires someinterpretation of load-step response and that these measurements can vary.Revision HistoryChanges from Original(December,2009)to A Revision Page •Corrected notation in Figure2and related description for better clarification (2)NOTE:Page numbers for previous revisions may differ from page numbers in the current version.7 SLVA381A–December2009–Revised September2011Revision History Submit Documentation FeedbackCopyright©2009–2011,Texas Instruments IncorporatedIMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAudio /audio Communications and Telecom /communicationsAmplifiers Computers and Peripherals /computersData Converters Consumer Electronics /consumer-appsDLP®Products Energy and Lighting /energyDSP Industrial /industrialClocks and Timers /clocks Medical /medicalInterface Security /securityLogic Space,Avionics and Defense /space-avionics-defense Power Mgmt Transportation and Automotive /automotiveMicrocontrollers Video and Imaging /videoRFID OMAP Mobile Processors /omapWireless Connctivity /wirelessconnectivityTI E2E Community Home Page Mailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2011,Texas Instruments Incorporated。


ANSYS/LS-DYNA中阻尼的设置ANSYS/LS-DYNA中阻尼的设置总结如下:EDDAMP, PART, LCID, VALDMP (用此命令流来定义阻尼)Defines mass weighted (Alpha) or stiffness weighted (Beta) damping for an explicit dynamics model.(默认有质量阻尼与刚度阻尼两种)图1 LS-DYNA中的阻尼选项PARTPART number [EDPART] identifying the group of elements to which damping should be applied. If PART = ALL (default), damping is applied to the entire model.(定义施加阻尼的Part 号,如果Part =ALL (or blank),整体质量阻尼将被应用于整个模型。
)LCIDLoad curve ID (previously defined with the EDCURVE command) identifying the damping coefficient versus time curve. If time-dependent damping is defined, an LCID is required.(用来指定相对于时间的质量阻尼)VALDMPConstant system damping coefficient or a scale factor applied to the curve defining damping coefficient versus time.(可以用来代替对时间的质量阻尼曲线,或者使用LCID命令中的比例系数)注意:Mass-weighted (Alpha) or stiffness-weighted (Beta) damping can be defined with the EDDAMP command. Generally, stiffness proportional or beta damping is effective foroscillatory motion at high frequencies. This type of damping is orthogonal to rigid body motion and so will not damp out rigid body motion. On the other hand, mass proportional or alpha damping is more effective for low frequencies and will damp out rigid body motion. The different possibilities are described below:1.Global DampingMass-weighted or Alpha damping (质量阻尼)When PART = (blank) or ALL (default), mass-weighted global damping can be defined in the following 2 ways. In this case, the same damping is applied for the entire structure.1.When the damping coefficient versus time curve (LCID) is specified usingthe EDCURVE command, VALDMP is ignored by LS-DYNA (although it iswritten in the LS-DYNA input file Jobname.K). The damping force appliedto each node in the model is given by f d= d(t)mv, where d(t) is thedamping coefficient as a function of time defined by the EDCURVEcommand, m is the mass, and v is the velocity.2.When the LCID is 0 or blank (default), a constant mass-weighted systemdamping coefficient can be specified using VALDMP.The constant and time-dependent damping, described above, cannot be defined simultaneously. The last defined global damping will overwrite any previously defined global damping.2.Damping defined for a PART(1)Mass-weighted or Alpha damping (质量阻尼)When both a valid PART number is specified and the damping coefficient versus time curve (LCID) is specified using the EDCURVE command, mass-weighted time-dependent damping will be defined for the particular PART. In this case, VALDMP will act as a scaling factor for the damping versus time curve (if VALDMP is not specified, it will default to 1). A valid PART number must be specified to define this type of damping. For example, use PART=1 (and not blank) when the entire model consists of only one PART. Issue the command repeatedly with different PART numbers in order to specify alpha damping for different PARTS.(2)Stiffness-weighted or Beta damping (刚度阻尼)When a valid PART number is specified with LCID= 0 or (blank) (default), a stiffness-weighted (Beta) constant damping coefficient for this particular PART canbe defined by VALDMP. The stiffness-weighted value corresponds to the percentage of damping in the high frequency domain. For example, 0.1 roughly corresponds to 10% damping in the high frequency domain. Recommended values range from 0.01 to 0.25. Values lower than 0.01 may have little effect. If a value larger than 0.25 is used, it may be necessary to lower the time step size significantly. Issue the command repeatedly with different PART numbers in order to specify beta damping for different PARTS. Time-dependent stiffness-weighted damping is not available in ANSYS LS-DYNA.The mass-weighted and stiffness-weighted damping, described above, cannot be defined simultaneously for a particular PART number. The last defined damping for the particular PART number will overwrite any previously defined mass-weighted or stiffness-weighted damping for this PART.In order to define the mass-weighted and stiffness-weighted damping simultaneously, you can use the MP,DAMP command to define stiffness-weighted (Beta) constant damping coefficient. However, do not use both of these commands together to define stiffness-weighted (Beta) constant damping coefficient for a particular PART. If you do, duplicate stiffness-weighted (Beta) constant damping coefficients for this PART will be written to the LS-DYNA input file Jobname.K. The last defined value will be used by LS-DYNA. Also, note that the MP,DAMP command is applied on the MAT number, and not on the PART number. Since a group of elements having the same MAT ID may belong to more than one PART (the opposite is not true), you need to issue the MP,DAMP command only once for this MAT ID and the stiffness-weighted (Beta) damping coefficients will be automatically defined for all the PART s with that MAT ID.Mass-weighted and stiffness-weighted damping can be defined simultaneously using the EDDAMP command only when mass-weighted damping (constant or time-dependent) is defined as global damping (EDDAMP, ALL, LCID, VALDMP) and stiffness-weighted damping is defined for all necessary PARTs (EDDAMP,PART, ,VALDMP).To remove defined global damping, reissue the EDDAMP, ALL command with LCID and VALDMP set to 0. To remove damping defined for a particular PART, reissue EDDAMP, PART, where PART is the PART number, with LCID and VALDMP set to 0. There is no default for the EDDAMP command, i.e., issuing the EDDAMP command with PART = LCID = VALDMP = 0 will result in an error. Stiffness-weighted damping defined by the MP,DAMP command can be deleted using MPDELE, DAMP, MAT.In an explicit dynamic small restart (EDSTART,2) or full restart analysis (EDSTART,3), you can only specify global alpha damping. This damping will overwrite any alpha damping input in the original analysis. If you do not input global alpha damping in the restart, the damping properties input in the original analysis will carry over to the restart.Damping specified by the EDDAMP command can be listed, along with other explicit dynamics specifications, by typing the command string EDSOLV$STAT into the ANSYS input window. Beta damping specified by the MP,DAMP command can be listed by MPLIST, MAT command.Menu PathsMain Menu>Preprocessor>Loads>Load Step Opts>Other>Change MatProps>DampingMain Menu>Preprocessor>Material Props>DampingMain Menu>Solution>Load Step Opts>Other>Change Mat Props>DampingK文件,Eg.1 $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $ SYSTEM DAMPING $ $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $*DAMPING_PART_STIFFNESS2 1.000$K文件,Eg.2 $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $ SYSTEM DAMPING $ $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $*DAMPING_GLOBAL00.5000E+02$。

Elastomeric Bearings, Dampers and Isolators: “Comfort, Care and Feeding”By LORD Corporation, Rotary Wing Business UnitWhat should you expect an elastomeric component to do in your aircraft? And how can you help them to last longer and perform optimally? Helicopters are recognized as one of the great engi-neering marvels of our time. In fact, there are thosewho would argue that their ability to function is scarcely believable. In spite of critics and nay-sayers, however, there continues to be a steady growth of owners, operators and passengers of helicopters all over the world. Many technical hurdles have been successfully conquered in order to achieve this commercial success. Elastomeric components are part of that solution.The most serious issues with regard to the operationof helicopters are those involving reliability/maintain-ability, noise and vibration. Elastomeric bearings, isolators and dampers have been enabling devices in the development of quieter, more comfortable and more reliable aircraft, reducing both Direct Operating Cost (DOC), and interior noise and vibration, and thereby increasing the acceptability of helicopter transportation.How is this so?A bearing is a mechanical device that accommodates dynamic motions. The term “bearing” is often used to refer to shaft-supports, which allow continuous rotation. Elastomeric bearings also allow rotational motion, but are limited to oscillatory motions (from 10 to 90 degrees, or up to ±1 inch). They also offer some clear advan-tages over “hard bearings.”• The elastomer layer(s) add a “spring” effect, tending to restore the angular motion back to the undefl ected position.• Elastomeric bearings have no “clearance,” andtherefore no “chatter” or possible fretting, and alsono increase in clearance as they wear. This results in smooth performance throughout the life of the part.• The degradation of elastomeric bearings is gradual and fail-safe.• Elastomeric bearings are maintenance-free. Onesignifi cant specifi c example: Unlike hard bearings, elastomerics are unaffected by airborne particles of sand and dirt, which notoriously cause accelerated wear in hard bearings.• On-condition removal criteria are determined during bench-testing. This allows the wear patterns andlimits to be quantifi ed and helps avoid prematureremoval of adequately functioning parts, saving DOC.• The elastomer in the bearing smooths the operation of the dynamic system, which inherently reduces vibra-tion and often improves control system response.An Isolator is a device installed in a load path to mini-mize the transmission of dynamic loads or motions through it. Isolators can be made with various elas-tomers or with an elastomer/fl uid (LORD Fluidlastic®) device, creating optimal isolation at the primary vibration frequencies.Dampers are used to attenuate dynamic motions in the aircraft, most often in the rotor. Elastomeric damperscan be used with or without special fl uids, which have the added advantages of more damping force for a given dynamic motion and consistent performance within wide ranges of temperature and dynamic motions. Both Elastomeric and LORD Fluidlastic dampers have demonstrated superior performance and cost effective-ness, with smaller size and weight, when compared tohydraulic dampers.Figure 1 – Collection of LORD Elastomeric Bearings used in helicopters, including shear restraints used in bearingless rotors, main rotor bearings and pitch linkrod end bearingsHow to Care for ElastomericsThe three types of elastomeric helicopter components have similar inspection and care guidelines. Through long-term testing at LORD Corporation as well as inspec-tion of returned-from-service parts from civilian and military aircraft, the primary forms of degradation have been identifi ed:• Elastomer fatigue from dynamic loading• Overload or inappropriate loading (Foreign ObjectDamage, Tool Damage or Tension Loading)• Oil or other incompatible fl uid contamination• Environmental degradation (effects of heat, ozone)• Loss of fl uid or pressure in LORD Fluidlastic Isolators or DampersHow can you identify these degradation modes, and which ones can you prevent?FatigueElastomer fatigue is the normal degradation mode of a bearing in oscillatory loading. A part can experience a surprising amount of crumbing, cracking and rubber loss before there is noticeable performance impact.As an elastomeric component is used, small surface cracks eventually form, starting in the highest strain region of the part. The crack edges rub together, growing slowly, and the abrasion causes what is most typically observed as “crumbing” (like eraser crumbs). See Figure 2. The cracks continue to grow and join together over time, and small segments of elastomer may also be extruded from the layer(s). Eventually, either a substantialFigure 2 – Typical fatigue “crumbing”This part is still completely functional.portion of the rubber will be extruded, or the cracks will grow to a removable condition. Other indications the part should be removed include increased vibration, touching or cracked metal shims. The applicable Component Repair & Overhaul (CR&O) Manual or Maintenance Manual is the defi nitive source for specifi c removal criteria for each application.Dampers, which are often made with higher damped LORD BTR® elastomer, show the same degradation modes. Fatigue damage is generally not preventable, but is a function of the amount of time that the aircraft is operating at the most strenuous conditions.Overload or Tension LoadingElastomeric parts are designed to operate generally in COMPRESSION, and/or SHEAR. Main Rotor Bearings, for example, normally carry loads in compression, and accommodate motion in shear. Compression loading occurs when the forces on the part are in a direction that tends to “squash” the material. In fact, elastomeric parts may show “bulging” of the elastomer around the edges when they are loaded. Shear loading occurs when the load on the part tends to stretch the elastomer in a direc-tion perpendicular to its smallest dimension or parallel to the “bond line.” See Figure 3.In the event that a part is placed in TENSION (which occurs when the elastomer is stretched, like a rubber band or a balloon), the elastomer has less strength, and will tend to crack and wear much more quickly. Both bearings and dampers are designed to avoid being placed in tension. When a part experiences a shearor tension load for which it was not designed, the tearFigure 3 – Shear sample before load is appliedstrength of the elastomer or the metal-to-rubber bond may be exceeded. This may result in large clean cracks in the layers, complete separation of the layers, or damaged metal shims (bending or cracking).Damage to a part during installation – due to contact with a sharp object, placing the part in tension or applying inappropriate forces or motions – can shorten the lifeof the elastomeric component. Special care should be taken to prevent the slicing, puncturing or gouging ofthe elastomer or bond line in any elastomeric part. Also whenever possible, it is desirable to remove any large static loads from elastomeric bearings when the aircraft is in storage. Blade folding and tie-down, for example, may include very high cocking motions to some rotor bearings. Finally, care should also be taken to protect the edges of the thin metal laminates (shims) from nicks or other damage, since this can signifi cantly reduce the fatigue life of the part. Figure 4 shows a part that expe-rienced overload after the elastomer section had been damaged.Oil or Other Incompatible Fluid ContaminationElastomeric materials have been developed to improve resistance to various aircraft fl uids, solvents and deter-gents. Still, petroleum-based oils, fuels, hydraulic fl uids and greases can have a devastating effect on the elas-tomer and the bond, and can very quickly cause weak-ening, swelling and extrusion.Figure 4 – Helicopter Landing Gear Mount that has experienced damage from a tool Parts exposed to oils, greases and hydraulic fl uids should be washed in mild detergent and water or dena-tured alcohol to prevent further damage. In the event of exposure to more volatile fl uids such as fuel, solvents or cleaning fl uids, the parts should be dried, and the fl uid allowed to evaporate. To prevent this serious and avoid-able degradation, special care should be taken to cover the elastomer surface when cleaning equipment nearby.Environmental Degradation (Effects of Heat, Ozone)Daily exposure to sunlight, heat and ozone can also cause surface cracking, often appearing perpendicular to the load in the elastomer. These surface cracks are small, and are not cause for removal. As the part is cycled, these may become sites for initiation of the expected fatigue cracks. Electric generators and motors as well as bright sunlight increase the presence of ozone.Most elastomers contain waxes designed to offer protec-tion from ozone. The waxes are designed to come to the surface of the part over time and provide a protective layer, (called wax bloom), which often appears gray or brown, and may fl ake or crumb as the part is exercised.Excessive heat will cause most bearings and isolators to become brittle on the exposed surfaces. (Heat does not normally cause the elastomer to “melt” or soften). The rubber-to-metal adhesives are also sensitive to heat, and performance of the part can be degraded as a resultFigure 5 – Engine isolator with severe oil contaminationNote the wavy edges and the de-bonded layers. This part is no longeroperational.of prolonged exposure to high temperatures. Prolonged exposure or storage at high temperatures (above 125°F [52°C]) also may contribute to stiffening of the elas-tomer, as well as compression or torsion “set” or “drift” in parts that have steady static loads. Certainly, material and adhesive selections are determined based on the expected environment and usage of the parts. If youhave an environment that could be considered unusual, it may be necessary to perform more frequent inspections.LORD BTR elastomers have been developed to reduce the effects of heat, chemicals and ozone, and they are used where there is known exposure to these effects.Loss of Fluid or Pressure in LORD Fluid-lastic Isolators or DampersLORD Fluidlastic devices have many of the same wear modes as typical elastomerics. They are completely sealed, and there is generally no requirement to monitor, fi ll, pressurize or meddle with the fl uid. The fl uids used are not harmful, in the event of accidental exposure. There is generally no provision for anyone other than LORD Corporation to repair, refi ll or maintain the part. For certain applications in which dynamic performance is considered critical, pressure or leak detection methods have been incorporated or are being requested toprovide positive assurance that the dampers or isolators are completely functional. The applicable CR&O Manuals or Maintenance Manuals provide all of the information necessary for such applications.SummaryElastomeric and LORD Fluidlastic Dampers, Isola-tors and Bearings have become important elements of the modern helicopter. They offer unique advantages in performance, enabling several new rotor design concepts, while reducing DOC, noise and vibration.Their inspection and appropriate replacement are key to obtaining maximum life and usage from each one.LORD Suggested Removal CriteriaWhile an understanding of the degradation modes of elastomeric bearings is valuable in and of itself, the critical question posed by most operators is “How do I determine if the bearing is still serviceable?” The photos presented in this article are intended to help you decide in the majority of cases.Because of the wide variety of applications, bearing geometry and operators, there may not be a simple answer. In every case in which removal criteria exist in a maintenance manual, it should be followed. However, when the elastomeric bearing is not covered by a main-tenance manual, the following general guidelines may be used:• If the bearing is visibly degraded to such a degree that it allows excessive motion or vibration, remove and replace it.• If the bearing has visible compression set, and it appears this will lead to diffi culty in installation or increased vibration, remove and replace it.Figure 6 – Typical ozone “checking” on a partFigure 7 – Unacceptable fatigue and fl uidcontamination on Turboprop Engine Mounting (DeHavilland Dash 8)The small cracks have no measurable depth.LORD provides valuable expertise in adhesives and coatings, vibration and motion control, and magnetically responsive technologies. Ourpeople work in collaboration with our customers to help them increase the value of their products. Innovative and responsive in an ever-changing marketplace, we are focused on providing solutions for our customers worldwide . . . Ask Us How.LORD Corporation World Headquarters 111 Lord DriveCary, NC 27511-7923 U.S.A.Customer Support Center +1 877 ASK LORD (275 5673)©2006 LORD Corporation Printed in U.S.A. OD LL6504 (Rev.2 2/06)• If enough elastomer has been extruded to allow the shims to touch or if there are any cracked shims, remove and replace the bearing.• If the bearing is separated (due to fatigue or bond line damage) over more than 25% of the bonded area, remove and replace it.• If the bearing is “oil” contaminated to a slight degree, it should be cleaned with a water-based detergent, rinsed and dried. If the contamination damage is extensive, removal and replacement are required.• If the bearing exhibits a very unusual damagecondition, it should be returned to the OEM Product Support Organization for further analysis.Fluidlastic and BTR are registered trademarks and “Ask Us How” is a trademark of LORD Techmark, Inc., a subsidiary of LORD Corporation.Figure 8 – Acceptable fatigue on Helicopter Nodal Beam (Bell 214 Type)Figure 9 – Acceptable heat exposure on EngineMounting for Turboprop Aircraft (DeHavilland Dash 8)Again, the best removal criteria are always based on the maintenance manual and experience. However, when in doubt, take it out!Where to Go for More InformationLORD has complete maintenance manual instructions available for most helicopter and fi xed wing aircraft applications. If a maintenance manual is not available, our team of product support specialists will respond to your request.。
起重机中英⽂对照外⽂翻译⽂献中英⽂对照外⽂翻译(⽂档含英⽂原⽂和中⽂翻译)Control of Tower Cranes WithDouble-Pendulum Payload DynamicsAbstract:The usefulness of cranes is limited because the payload is supported by an overhead suspension cable that allows oscilation to occur during crane motion. Under certain conditions, the payload dynamics may introduce an additional oscillatory mode that creates a double pendulum. This paper presents an analysis of this effect on tower cranes. This paper also reviews a command generation technique to suppress the oscillatory dynamics with robustness to frequency changes. Experimental results are presented to verify that the proposed method can improve the ability of crane operators to drive a double-pendulum tower crane. The performance improvements occurred during both local and teleoperated control.Key words:Crane , input shaping , tower crane oscillation , vibrationI. INTRODUCTIONThe study of crane dynamics and advanced control methods has received significant attention. Cranes can roughly be divided into three categories based upontheir primary dynamic properties and the coordinate system that most naturally describes the location of the suspension cable connection point. The first category, bridge cranes, operate in Cartesian space, as shown in Fig. 1(a). The trolley moves along a bridge, whose motion is perpendicular to that of the trolley. Bridge cranes that can travel on a mobile base are often called gantry cranes. Bridge cranes are common in factories, warehouses, and shipyards.The second major category of cranes is boom cranes, such as the one sketched in Fig. 1(b). Boom cranes are best described in spherical coordinates, where a boom rotates aboutaxes both perpendicular and parallel to the ground. In Fig. 1(b), ψis the rotation aboutthe vertical, Z-axis, and θis the rotation about the horizontal, Y -axis. The payload is supported from a suspension cable at the end of the boom. Boom cranes are often placed on a mobile base that allows them to change their workspace.The third major category of cranes is tower cranes, like the one sketched in Fig. 1(c). These are most naturally described by cylindrical coordinates. A horizontal jib arm rotates around a vertical tower. The payload is supported by a cable from the trolley, which moves radially along the jib arm. Tower cranes are commonly used in the construction of multistory buildings and have the advantage of having a small footprint-to-workspace ratio. Primary disadvantages of tower and boom cranes, from a control design viewpoint, are the nonlinear dynamics due to the rotational nature of the cranes, in addition to the less intuitive natural coordinate systems.A common characteristic among all cranes is that the pay- load is supported via an overhead suspension cable. While this provides the hoisting functionality of the crane, it also presents several challenges, the primary of which is payload oscillation. Motion of the crane will often lead to large payload oscillations. These payload oscillations have many detrimental effects including degrading payload positioning accuracy, increasing task completion time, and decreasing safety. A large research effort has been directed at reducing oscillations. An overview of these efforts in crane control, concentrating mainly on feedback methods, is provided in [1]. Some researchers have proposed smooth commands to reduce excitation of system flexible modes [2]–[5]. Crane control methods based on command shaping are reviewed in [6]. Many researchers have focused on feedback methods, which necessitate the addition necessitate the addition of sensors to the crane and can prove difficult to use in conjunction with human operators. For example, some quayside cranes have been equipped with sophisticated feedback control systems to dampen payload sway. However, the motions induced by the computer control annoyed some of the human operators. As a result, the human operators disabled the feedback controllers. Given that the vast majority of cranes are driven by human operators and will never be equipped with computer-based feedback, feedback methods are not considered in this paper.Input shaping [7], [8] is one control method that dramatically reduces payload oscillation by intelligently shaping the commands generated by human operators [9], [10]. Using rough estimates of system natural frequencies and damping ratios, a series of impulses, called the input shaper, is designed. The convolution of the input shaper and the original command is then used to drive the system. This process is demonstrated with atwo-impulse input shaper and a step command in Fig. 2. Note that the rise time of the command is increased by the duration of the input shaper. This small increase in the rise time isnormally on the order of 0.5–1 periods of the dominant vibration mode.Fig. 1. Sketches of (a) bridge crane, (b) boom crane, (c) and tower crane.Fig. 2. Input-shaping process.Input shaping has been successfully implemented on many vibratory systems including bridge [11]–[13], tower [14]–[16], and boom [17], [18] cranes, coordinate measurement machines[19]–[21], robotic arms [8], [22], [23], demining robots [24], and micro-milling machines [25].Most input-shaping techniques are based upon linear system theory. However, some research efforts have examined the extension of input shaping to nonlinear systems [26], [14]. Input shapers that are effective despite system nonlinearities have been developed. These include input shapers for nonlinear actuator dynamics, friction, and dynamic nonlinearities [14], [27]–[31]. One method of dealing with nonlinearities is the use of adaptive or learning input shapers [32]–[34].Despite these efforts, the simplest and most common way to address system nonlinearities is to utilize a robust input shaper [35]. An input shaper that is more robust to changes in system parameters will generally be more robust to system nonlinearities that manifest themselves as changes in the linearized frequencies. In addition to designing robust shapers, input shapers can also be designed to suppress multiple modes of vibration [36]–[38].In Section II, the mobile tower crane used during experimental tests for this paper is presented. In Section III, planar and 3-D models of a tower crane are examined to highlight important dynamic effects. Section IV presents a method to design multimode input shapers with specified levels of robustness. InSection V, these methods are implemented on a tower crane with double-pendulum payload dynamics. Finally, in Section VI, the effect of the robust shapers on human operator performance is presented for both local and teleoperated control.II. MOBILE TOWER CRANEThe mobile tower crane, shown in Fig. 3, has teleoperation capabilities that allow it to be operated in real-time from anywhere in the world via the Internet [15]. The tower portion of the crane, shown in Fig. 3(a), is approximately 2 m tall with a 1 m jib arm. It is actuated by Siemens synchronous, AC servomotors. The jib is capable of 340°rotation about the tower. The trolley moves radially along the jib via a lead screw, and a hoisting motor controls the suspension cable length. Motor encoders are used for PD feedback control of trolley motion in the slewing and radial directions. A Siemens digital camera is mounted to the trolley and records the swing deflection of the hook at a sampling rate of 50 Hz [15].The measurement resolution of the camera depends on the suspension cable length. For the cable lengths used in this research, the resolution is approximately 0.08°. This is equivalent to a 1.4 mm hook displacement at a cable length of 1 m. In this work, the camera is not used for feedback control of the payload oscillation. The experimental results presented in this paper utilize encoder data to describe jib and trolley position and camera data to measure the deflection angles of the hook. Base mobility is provided by DC motors with omnidirectional wheels attached to each support leg, as shown in Fig. 3(b). The base is under PD control using two HiBot SH2-based microcontrollers, with feedback from motor-shaft-mounted encoders. The mobile base was kept stationary during all experiments presented in this paper. Therefore, the mobile tower crane operated as a standard tower crane.Table I summarizes the performance characteristics of the tower crane. It should be noted that most of these limits areenforced via software and are not the physical limitations of the system. These limitations are enforced to more closely match theoperational parameters of full-sized tower cranes.Fig. 3. Mobile, portable tower crane, (a) mobile tower crane, (b) mobile crane base.TABLE I MOBILE TOWER CRANE PERFORMANCE LIMITSFig. 4 Sketch of tower crane with a double-pendulum dynamics.III. TOWER CRANE MODELFig.4 shows a sketch of a tower crane with a double-pendulum payload configuration. The jib rotates by an angle around the vertical axis Z parallelto the tower column. The trolley moves radially along the jib; its position along the jib is described by r . The suspension cable length from the trolley to the hook is represented by an inflexible, massless cable of variable length 1l . The payload is connected to the hook via an inflexible, massless cable of length 2l . Both the hook and the payload are represented as point masses having masses h m and p m , respectively.The angles describing the position of the hook are shown in Fig. 5(a). The angle φrepresents a deflection in the radial direction, along the jib. The angle χ represents a tangential deflection, perpendicular to the jib. In Fig. 5(a), φ is in the plane of the page, and χ lies in a plane out of the page. The angles describing the payload position are shown in Fig. 5(b). Notice that these angles are defined relative to a line from the trolley to the hook. If there is no deflection of the hook, then the angleγ describes radial deflections, along the jib, and the angle α represents deflections perpendicular to the jib, in the tangential direction. The equations of motion for this model were derived using a commercial dynamics package, but they are too complex to show in their entirety here, as they are each over a page in length.To give some insight into the double-pendulum model, the position of the hook and payload within the Newtonian frame XYZ are written as —h q and —p q , respectivelyWhere -I , -J and -K are unit vectors in the X , Y , and Z directions. The Lagrangian may then be written asFig. 5. (a) Angles describing hook motion. (b) Angles describing payload motion.Fig. 6. Experimental and simulated responses of radial motion.(a) Hook responses (φ) for m 48.01=l ,(b) Hook responses for m 28.11=lThe motion of the trolley can be represented in terms of the system inputs. The position of the trolley —tr q in the Newtonian frame is described byThis position, or its derivatives, can be used as the input to any number of models of a spherical double-pendulum. More detailed discussion of the dynamics of spherical double pendulums can be found in [39]–[42].The addition of the second mass and resulting double-pendulum dramatically increases the complexity of the equations of motion beyond the more commonly used single-pendulum tower model [1], [16], [43]–[46]. This fact can been seen in the Lagrangian. In (3), the terms in the square brackets represent those that remain for the single-pendulum model; no —p q terms appear. This significantly reduces the complexity of the equations because —p q is a function of the inputs and all four angles shown in Fig. 5.It should be reiterated that such a complex dynamic model is not used to design the input-shaping controllers presented in later sections. The model was developed as a vehicle to evaluate the proposed control method over a variety of operating conditions and demonstrate its effectiveness. The controller is designed using a much simpler, planar model.A. Experimental V erification of the ModelThe full, nonlinear equations of motion were experimentally verified using several test cases. Fig.6 shows two cases involving only radial motion. The trolley was driven at maximum velocity for a distance of 0.30 m, with 2l =0.45m .The payload mass p m for both cases was 0.15 kg and the hook mass h m was approximately 0.105 kg. The two cases shown in Fig. 6 present extremes of suspension cable lengths 1l . In Fig. 6(a), 1l is 0.48 m , close to the minimum length that can be measured by the overhead camera. At this length, the double-pendulum effect is immediately noticeable. One can see that the experimental and simulated responses closely match. In Fig. 6(b), 1l is 1.28 m, the maximum length possible while keeping the payload from hitting the ground. At this length, the second mode of oscillation has much less effect on the response. The model closely matches the experimental response for this case as well. The responses for a linearized, planar model, which will be developed in Section III-B, are also shown in Fig. 6. The responses from this planar model closely match both the experimental results and the responses of the full, nonlinear model for both suspension cable lengths.Fig. 7. Hook responses to 20°jib rotation:(a) φ (radial) response;(b) χ (tangential) response.Fig. 8. Hook responses to 90°jib rotation:φ(radial) response;(b) χ(tangential) response.(a)If the trolley position is held constant and the jib is rotated, then the rotational and centripetal accelerations cause oscillation in both the radial and tangential directions. This can be seen in the simulation responses from the full nonlinear model in Figs. 7 and 8. In Fig. 7, the trolley is held at a fixed position of r = 0.75 m, while the jib is rotated 20°. This relatively small rotation only slightly excites oscillation in the radial direction, as shown in Fig. 7(a). The vibratory dynamics are dominated byoscillations in the tangential direction, χ, as shown in Fig. 7(b). If, however, a large angular displacement of the jib occurs, then significant oscillation will occur in both the radial and tangential directions, as shown in Fig. 8. In this case, the trolley was fixed at r = 0.75 m and the jib was rotated 90°. Figs. 7 and 8 show that the experimental responses closely match those predicted by the model for these rotational motions. Part of the deviation in Fig. 8(b) can be attributed to the unevenness of the floor on which the crane sits. After the 90°jib rotation the hook and payload oscillate about a slightly different equilibrium point, as measured by the overhead camera.Fig.9.Planardouble-pendulummodel.B.Dynamic AnalysisIf the motion of the tower crane is limited to trolley motion, like the responses shown in Fig. 6, then the model may be simplified to that shown in Fig. 9. This model simplifies the analysis of the system dynamics and provides simple estimates of the two natural frequencies of the double pendulum. These estimates will be used to develop input shapers for the double-pendulum tower crane.The crane is moved by applying a force )(t u to the trolley. A cable of length 1l hangs below the trolley and supports a hook, of mass h m , to which the payload is attached using rigging cables. The rigging and payload are modeled as a second cable, of length 2l and point mass p m . Assuming that the cable and rigging lengths do not change during the motion, the linearized equations of motion, assuming zero initial conditions, arewhere φ and γ describe the angles of the two pendulums, R is the ratio of the payload mass to the hook mass, and g is the acceleration due to gravity.The linearized frequencies of the double-pendulum dynamics modeled in (5) are [47]Where Note that the frequencies depend on the two cable lengths and the mass ratio.Fig. 10. Variation of first and second mode frequencies when m l l 8.121=+.。
自动化专业英语课后答案【篇一:自动化专业英语试卷及答案】translate the following words or phrases into chinese ①metric度量收敛方差随机等价动态方程判据、评价标准测量模型偏微分方程在概率意义上,依概率② convergence ③ covariance④stochastic ⑤ equivalence ⑥ dynamic equation ⑦ criteria ⑧measurement model ⑨ partial derivative equation ⑩ in the sense of probability2. explain the following symbols in english?? ① bm the second order derivative of b sub m, b double prime sub m② a?b③ xi?a④ ?yx a is equivalent to b xi approaches a the partial derivative of y with respective to x⑤ ?abintegral between limits b to a ⑥ a‖b ⑦ a is parallel to b the cube root of a set a is contained in x a ⑧ a?x⑨ ?a?b?c?d??e?fdivided by e equals f a plus b minus c multiplied d, all⑩ ??,?n,s.t ai?a as i??for any special ?, there is a respected n, such that ai approaches a as i approaches ?二、translate the following paragraphs into chineseparagraph a[8 points]a subset a?xis said to be bounded if there exists m?rsuch that d(x,y)?mfor allx,y?a. the diameter of a is defined to besup?d(x,y)x,y?a?. a bounded metric space is one for which x itself is bounded.bounded intervals in r are bounded sets. a discrete metric space is bounded (take m?1).译文:一个子集a?x被称为是有界的,如果存在m?r使得对所有x,y?a有d(x,y)?m。
一种用于电力系统电压稳定分析的雅可比矩阵关键特征值算法周陶宏;李宏仲;郑健【摘要】分岔是一种常见的非线性现象.提出了一种追踪雅可比矩阵关键特征值的连续性算法,该方法首先利用特征值实部、特征值关于分岔参数的一阶和二阶灵敏度系数,构造一个判断关键特征值的指标,然后利用该指标来确定某几个特征值为待选的关键特征值,最后利用连续性方法对关键特征值进行连续追踪,直至霍普夫(Hopf)分岔点.【期刊名称】《电力与能源》【年(卷),期】2012(033)003【总页数】5页(P213-217)【关键词】霍普夫分岔;关键特征值;连续法;电压稳定【作者】周陶宏;李宏仲;郑健【作者单位】上海市电力公司,上海200122;上海电力学院电力与自动化工程学院,上海200090;上海市电力公司,上海200122【正文语种】中文【中图分类】TM7120 引言采用霍普夫(Hopf)分岔理论分析电力系统电压的稳定性,必须准确求解霍普夫分岔点的位置,特别是确定最先发生穿越虚轴现象的共轭特征值,即关键特征值。
George分别利用牛顿法、幂法、反幂法和Rayleigh商迭代法来计算占主导地位的关键特征值,并对这些计算方法的鲁棒性和计算效率分别进行了对比[1-2];文献[3]利用改进的矩阵变换法来求解大规模系统动态模型的关键特征值;文献[4]则进一步提出了利用基于多处理器的并行算法来提高计算效率;L.Wang等人提出了充分利用增广矩阵稀疏特性的计算方法[5];文献[6]和文献[7]分别提出了一种对矩阵的特征值进行连续追踪的方法,Xiaoyu Wen等人将该方法引入了电力系统的稳定研究中,提出了一种追踪关键特征值的连续法[8]。
本文将在这些计算方法的基础上做进一步的分析与研究。
首先,利用特征值实部、特征值关于分岔参数的一阶和二阶灵敏度系数,构造一个能够判断关键特征值的指标,然后直接利用连续性方法,对关键特征值进行连续追踪,直至霍普夫分岔点。
Chapter4Mechanical Design of MEMS GyroscopesThis chapter describes the fundamental mechanical elements in the MEMS imple-mentation of vibratory mon mechanical structures are presented and analyzed for both linear and torsional gyroscopes,discussing primary vibratory system design issues to realize the gyroscopic dynamical system.Analysis of vari-ousflexure systems is followed by discussions on anisoelasticity and quadrature er-ror due to mechanical imperfections.Finally,damping related issues are addressed, important material properties of silicon are highlighted,and mechanical design con-siderations to achieve a robust sensing element are discussed.4.1Mechanical Structure DesignsVarious vibratory MEMS gyroscopes have been reported in the literature based on a wide range of mechanical structures.The common goal of all vibratory gyroscope structures is to realize a drive oscillator that generates and maintains a constant momentum,and a sense-mode accelerometer that measures the sinusoidal Coriolis force.Vast majority of micromachined rate gyroscopes form the drive oscillator and the sense-mode accelerometer out of a mass or a combination of masses suspended by flexible beams above a substrate.The Coriolis force induced on the masses due to the drive vibration and the angular rate input has to be transferred to the sense-mode accelerometer in the orthogonal direction.Thus,at least one proof mass is required to be common to both the drive oscillator and the sense-mode accelerometer.The primary objective of mechanical structure is to form the coupled orthogo-nal drive and sense dynamical systems by providing the required degree-of-freedom (DOF)for the ually both the drive and sense dynamical systems are1-DOF oscillators.Thus,the resulting overall gyroscope can be modeled as a2-DOF dynamical system as in Figure4.1,where the modes are coupled by the Coriolis effect.73744Mechanical Design of MEMS Gyroscopes The drive-mode oscillator and the sense-mode accelerometer can be based on either linear or torsional motion.In the case of a linear vibratory gyroscope,con-servation of linear momentum results in energy transfer from the drive axis to the sense axis,while in a torsional gyroscope conservation of angular momentum re-sults in energy transfer.The following sections outline the basics of both linear and torsional gyroscope designs.Fig.4.1The proof mass,which is free to oscillate inthe drive and sense directions,forms the2-DOF gyroscopesystem.4.2Linear Vibratory SystemsLinear or translational micromachined vibratory gyroscopes are based on sustain-ing a linear drive oscillation,and detecting a linear sense-mode response to the si-nusoidal Coriolis force in the presence of an angular-rate input.Since the induced Coriolis force is orthogonal to the drive-mode vibration,the proof-mass is required to be free to oscillate in two orthogonal linear directions,and desired to be con-strained in other vibrational modes.The suspension system design becomes critical in achieving these objectives.The drive and sense axes are determined primarily by the desired angular rate de-tection axis.For example,a z-Axis gyroscope(Figure4.2)requires the proof mass to be free to oscillate in the two in-plane orthogonal directions:the drive direction along the x-Axis and the sense direction along the y-Axis.The proof mass that pro-vides the Coriolis coupling is allowed to oscillate along both x-Axis and y-Axis, becoming a2-DOF system.4.2Linear Vibratory Systems75Fig.4.2Z-Axis gyroscope,the drive direction is alongthe x-Axis,and the sensedirection is along the y-Axis.An in-plane y-Axis gyroscope(Figure4.3)proof mass is required to oscillate in one in-plane direction along the x-Axis and one out-of-plane direction along the z-Axis.The drive and sense axes can be interchanged depending on the actuation and detection schemes.An x-Axis gyroscope requires either the drive or the sense direction to be along the y-Axis.Thus,in many cases a y-Axis gyroscope design can be used as x-Axis gyroscope by rotating90◦in plane.Fig.4.3Y-Axis gyroscope,the drive direction is alongthe x-Axis,and the sensedirection is along the z-Axis.4.2.1Linear Suspension SystemsTheflexure system that suspends the proof-mass above the substrate usually consists of thinflexible beams,formed in the same structural layer as the proof-mass.The thin beams have to be oriented to be compliant in both the drive and sense motion mon suspension structures utilized in z-Axis micromachined gy-roscopes include crab-leg suspensions(Figure4.4),serpentine suspensions(Figure 4.5),hairpin suspensions(Figure4.6),H-type suspensions(Figure4.7),and U-beam suspensions(Figures4.9and4.11).764Mechanical Design of MEMS GyroscopesFig.4.4Crab-leg suspensions.Fig.4.5Serpentine suspensions.These suspension systems are widely used for both z-Axis gyroscopes with in-plane drive and sense modes,and x/y-Axis gyroscopes with one in-plane and one out-of-plane mode.Gyroscopes with an out-of-plane mode are usually fabricated with a thin structural layer to allow out-of-plane deflections of the beams,while gyroscopes with in-plane drive and sense modes are preferably fabricated with a thicker structural layer to suppress out-of-plane modes.The crab-leg and H-type suspensions are known to provide better symmetry among the drive and sense-modes,allowing to easily locate the drive and sense4.2Linear Vibratory Systems77Fig.4.6Hairpin suspensions.Fig.4.7H-type suspensions.modes closer.In the crab-leg,serpentine and hairpin suspensions,drive motion re-sults in deflections also in the sense-mode beams,which often causes undesired en-ergy transfer into the sense-mode.Thus,H-type suspension and especially U-beam suspensions with decoupling frames provide better mode-decoupling,which will be discussed further next.784Mechanical Design of MEMS Gyroscopes 4.2.1.1Frame StructuresSuspension systems similar to crab-leg,serpentine or hairpin suspensions are com-pliant in two orthogonal directions.The same beams experience deflections in both modes,resulting in undesired coupling between the drive and sense modes.Since the drive-mode amplitude is orders of magnitude larger than sense-mode,it is often required to isolate the drive motion from the sense motion.It is also desired to limit the deflection direction of the drive and sense electrodes,so that drive electrodes deflect only in drive direction,and sense electrodes deflect only in sense direction. This enhances the precision and stability of the drive actuation and sense detection electrodes.Fig.4.8Lumped model of thedrive frame implementationwith U-beam suspensions.Fig.4.9Drive frame implementation with U-beam suspensions,minimizing the component of the actual drive motion along the sense detection axis.4.2Linear Vibratory Systems79To decouple the drive motion and sense motion,it is common to implement a frame structure that nests the proof-mass.Two basic approaches in frame imple-mentation are using a drive frame as in Figure4.9,or a sense frame as in Figure 4.11.In the drive frame implementation,the proof mass is nested inside a frame that is constrained to move only in the drive direction.This approach assures that the drive motion is very well aligned with the designed drive axis,and minimizes the component of the actual drive motion along the sense detection axis.It also provides improved side stability and minimal parasitic sense-direction forces in the drive actuators.Fig.4.10Lumped model ofthe sense frame implemen-tation with U-beam suspen-sions.Fig.4.11Sense frame implementation with U-beam suspensions,minimizing the undesired capacitance change in the sense electrodes due to the drive motion.804Mechanical Design of MEMS Gyroscopes The sense frame implementation is based on nesting the proof mass inside a frame that is constrained to move only in the sense direction.The sense electrodes are attached to the frame,and relative motion in the sense electrodes along the drive direction is prevented.This approach minimizes the undesired capacitance change in the sense electrodes due to the drive motion.More sophisticated frame structures that provide the advantages of both drive and sense frame implementations are also possible.For example,the z-axis gyro-scope in[94]by Bosch utilizes a drive frame around the proof-mass which oscil-lates only in the drive direction,and a sense frame inside the proof-mass which is fixed in the drive direction and oscillates with the proof-mass in the sense direction (Figure4.12).With this double frame structure,the drive oscillations are very well aligned with the drive axis,parasitic components of the drive forces in the sense di-rection are suppressed,and the motion of the sense-electrodes in the drive direction is eliminated.Fig.4.12A double-frame implementation example based on[94],which combines the advantages of drive and sense frames.4.2Linear Vibratory Systems81 4.2.1.2Anti-Phase DevicesGyroscopes are inherently sensitive to external inertial inputs such as ambient vi-brations and shock.Many applications require gyroscopes to function under a cer-tain degree of vibration environment.Given the small amplitudes of the Coriolis response,the response to external accelerations and vibrations could easily disrupt the rate measurements.Anti-phase systems,also known as tuning fork gyroscopes(TFG),aim to can-cel common-mode inputs.In the tuning fork architecture,two identical masses are driven in opposite directions(anti-phase),which causes the Coriolis forces induced on the two masses to be in opposite directions also(Figure4.13).When the sense-mode response of the two masses are detected in a differential mode,their response to Coriolis forces are added,but their common-mode response in the same direction are canceled out.Thus,common-mode rejection is achieved while the rate signal is preserved.Fig.4.13Anti-phase tuning fork gyroscopes(TFG),which provide common-mode rejection by utilizing two anti-phase vibrating masses in a differential mode.To achieve an anti-phase oscillation in the drive-mode,the two masses are cou-pled with a coupling spring as in Figures4.13and4.14.The coupling spring results in a2-DOF drive dynamical system,with an in-phase and an anti-phase mode.The device is operated at the anti-phase drive frequency,which excites the masses in opposite directions as desired.824Mechanical Design of MEMS GyroscopesFig.4.14An example anti-phase tuning fork gyroscope system,which consists of two drive-frame gyroscopes coupled in the drive mode by a spring.4.2.2Linear Flexure ElementsIn linear micromachined gyroscopes,the suspension systems are usually designed to be compliant along the desired motion direction,and stiff in other directions.Most suspension systems utilize narrow beams as the primaryflexure elements,aligning the narrow dimension of the beam normal to the motion axis(Figure4.15).Fig.4.15Thefixed-guided end beam under translational deflection.In purely translational modes,the boundary conditions of the beams that connect the components of the gyroscopes are most commonly thefixed-guided end con-figuration(Figure4.15),in which the moving end of the beam remains parallel to thefixed end.Many complete gyroscope suspension systems can be modeled as a combination offixed-guided end beams.If we define the length of a beam L as the x-axis dimension,width w as the y-axis dimension,and the thickness t as the z-axis dimension,the area moments of inertia of the beam in the y and z directions becomeI y=112tw3(4.1)I z=112wt3(4.2)For a singlefixed-guided beam(Figure4.15),the translational stiffness for mo-tion in the orthogonal direction to the beam axis is given by[106]k y,z=123EI y,z(L2)3(4.3)where E is the Young’s Modulus.Thus,the stiffness values of thefixed-guided beam along the three principle axes becomek x=E wtL(4.4)k y=E tw3L3(4.5)k z=E wt3L(4.6)It should be noticed that the ratio of the stiffness values along the z and y axes isk z k y =(tw)2.Thus,large thickness is a key factor in suppressing the out-of-plane de-flections.The ratio of the axial stiffness to the y-axis stiffness is k xk y =(Lw)2.This ratiocould be quite large depending on the beam design,providing excellent suppression of orthogonal motion.Even though theoretical expressions of the beam elements could be a practical guide in design,finite element analysis(FEA)simulations are essential in estima-tion of theflexure characteristics.For example,let us analyze afixed-guided beam with the dimensions L=500µm,w=10µm,and t=100µm.Assuming an elastic modulus of E=130GPa,FEA results indicate the y-axis reaction force for a1µm purely y-axis deflection to be142µN,yielding k y=142N/m.However,the reac-tion force for10µm deflection increases to1980µN,resulting in k y=198N/m.This illustrates the non-linearity of the beam for increased deflections.FEA results on thefixed-guided beam also reveals one of the major limitations of this suspension type.The x-axis reaction force for a1µm y-axis deflection is 410µN.For10µm deflection,the x-axis reaction force increases to over40400µN. This extraordinarily large force is due to the fact that the beam starts to be axially loaded as the lateral force increases.Thus,singlefixed-guided beams should not be used for large deflectionflexures such as the drive-direction suspensions.Fig.4.16Folded beam(U-shaped)suspensions consistof twofixed-guided beamsin series,and eliminate thenonlinearity and axial-loadinglimitations of singlefixed-guided beams.Folded beam (U-shaped)suspensions eliminate the nonlinearity and axial-loading limitations of single fixed-guided beams.By connecting two fixed-guided beams in series in the folded beams (Figure 4.16),the two connection points of the suspension are on the same side,and lateral deflections do not result in axial loading.Since a folded beam consists of two fixed-guided beams of stiffness k y in series,the stiffness of a folded beam of length L ,width w and thickness h becomes 1k f olded =1k y +1k y (4.7)k f olded =E tw 32L3(4.8)One limitation of the folded beams is the reduced axial stiffness.The distance between the two beams results in a moment arm under an axial load,and causes bending as in Figure 4.17.This could become a disadvantage in designs that require substantial suppression of axial motion.Fig.4.17The folded beam(U-shaped)suspensions underlateral and axial loading.Thecompliance of the foldedbeam under axial loadingdue to bending could be undesirable.The axial compliance problem of the folded beams could be solved by providing symmetry in the axial direction.The double-folded suspension beam contains two folded beams symmetrically connected (Figure 4.18).Since it could be modeled as two folded beams in parallel,the stiffness of a double-folded beam isk double −f olded =2k f olded =E tw 3L3(4.9)In summary,for small deflections the folded beam provides half the stiffness of a fixed-guided beam while the double-folded beam has the same stiffness as a fixed-guided beam.As the deflections get larger compared to the beam dimensions,the fixed-guided beam stiffness becomes non-linear,as seen in Figure 4.19.In complete suspension systems,a number of flexure elements are connected to the proof-mass.The total stiffness in a certain direction could be approximated by the sum of all flexure stiffness values in that direction.However,this approxima-tion assumes that the compliance of the proof-mass,frame structures,and flexuresFig.4.18Double-foldedbeam suspension,whichcontains two symmetricallyconnected folded beams,pro-vide excellent axial stiffnessand linearity.in other directions are negligible.In reality,these factors dramatically reduce the overall stiffness.Thus,modal analyses in FEA software is absolutely necessary for accurate estimation and design of resonant frequencies.Fig.4.19Comparison of the y-axis reaction forces infixed-guided,folded,and double-folded beams.4.3Torsional Vibratory SystemsTorsional or rotation-based micromachined gyroscopes utilize rotational vibratory motion in their drive and sense modes.The operation principle is based on conserva-tion of primarily angular momentum,instead of linear momentum as in translational vibratory gyroscopes.Torsional gyroscope structures consist of a rotational drive oscillator that gen-erates and maintains a constant angular momentum,and a sense-mode angular ac-celerometer that measures the sinusoidal Coriolis moment.Thus,similar to linear vibratory gyroscopes,a2-DOF oscillatory system is formed.Fig.4.20Torsional Z-Axisgyroscope:The drive oscilla-tion is about the x-Axis,andthe sense oscillation is aboutthe y-Axis.In a z-Axis torsional gyroscope,the proof mass rotates about the two in-plane orthogonal directions:the drive direction rotation about the x-Axis and the sense di-rection rotation about the y-Axis as in Figure4.20.The Coriolis moment is about the axis cross-product of the input angular rate and the drive angular velocity vectors.Fig.4.21Torsional Y-Axisgyroscope:The drive oscilla-tion is about the z-Axis,andthe sense oscillation is aboutthe x-Axis.An in-plane y-Axis torsional can be implemented with either an in-plane drive (about the z-Axis)and out-of-plane sense(about the x-Axis)configuration,or an out-of-plane drive(about the x-Axis)and in-plane sense(about the z-Axis)configu-ration as in Figure4.21.Fig.4.22Torsional gyro-scope by Bosch,with a drive-mode about the z-Axis[95].SEM courtesy of Bosch.4.3.1Torsional Suspension SystemsGimbals are commonly used in torsional gyroscope suspension systems to decou-ple the drive and sense modes,and to suppress undesired modes.Many suspension system and gimbal configurations are possible in torsional vibratory gyroscopes. Similar to linear gyroscope systems,the suspension system that supports the masses and gimbals usually consists of thinflexible beams,formed in the same structurallayer as the proof-mass.Fig.4.23Torsional z-Axisgyroscope with drive gimbalstructure.The drive-modedeflection angle of the gimbalisθd,and the sense-modedeflection angle of the sensingmass isφ.An example gimbal system for a z-Axis torsional gyroscope based on[97]wasshown in Figure4.23.In the drive-mode,the outer drive gimbal is excited about thex-axis.In the presence of an angular rate input about z-axis,the sinusoidal Coriolis torque is induced about the y-axis,which causes the sense-mode response of theinner mass(Figure4.24).Fig.4.24The drive and sense modes of a typical torsional z-axis gyroscope,similar to[97].A representative gimbal implementation in y-Axis torsional gyroscopes based on[99]is presented in Figure4.25.The system consists of an inner gimbal that can deflect torsionally in-plane about the z-Axis,and an the outer mass attached to the inner gimbal.The drive-mode is in-plane about the z-Axis,and the sense-mode is out-of-plane about the x-Axis.In the drive-mode,the inner gimbal and the outer mass oscillate together,and the angular rate input about the y-Axis generates a Coriolis torque about the x-Axis.The outer mass responds to the Coriolis torque by deflecting torsionally about the x-Axis relative to the drive gimbal.The sense-mode response is detected by the out-of-plane electrodes located underneath the outer mass structure.Fig.4.25The gimbal system in a y-axis torsional gyroscope,based on[99].4.3.2Torsional Flexure Elements4.3.2.1Out-of-Plane Torsional HingesOut-of-plane deflections,which are about the x -axis or y -axis,are most commonly achieved by torsional beams (Figure 4.26)aligned along the deflection axis.In the purely torsional mode,the boundary conditions of the beam are such that the moving end of the beam remains parallel to the fixed end,but rotates about the axis normal to the end plane.Fig.4.26Typical torsionalbeams used for out-of-planedeflections,about the x or yaxes.Assuming each torsional beam is straight with a uniform cross-section,and the structural material is homogeneous and isotropic;the torsional stiffness of each beam with a length of L can be modeled asK =SG(4.10)where G =E 2(1−ν)is the shear modulus with the elastic modulus E and Poisson’s ratio ν.For a beam with a rectangular cross-section of width w and thickness t ,given that w ≤t ,the cross-sectional coefficient S can be expressed as [106]S =tw 3 13−0.21w t 1−t 412t 4 (4.11)4.3.2.2In-Plane Torsional FlexuresIn-plane torsional deflections about the z -axis are usually achieved by a combina-tion of fixed-guided end beams (Figure 4.27).The beams are configured such that the center lines along their lengths intersect at the rotation center of the mass.The boundary conditions of the beams are different from linear gyroscope systems,in that the moving end of the beam does not remain parallel to the fixed end,and de-flects with an angle equal to the total rotation angle.Fig.4.27Fixed-guided flex-ure beams commonly used forin-plane (about the z -Axis)torsional suspensions.The suspension beams can be located inside or outside the mass.The direction of the moving end deflection angle,and thus the boundary condition depends on the location of the beams.Let us consider a single fixed-guided beam,and define the length of a beam L as the y -axis dimension,width w as the y -axis dimension,and the thickness t as the z -axis dimension.The area moment of inertia of the beam in the y direction isI y =112tw 3(4.12)When the beam is located inside the mass as in Figure4.28and the moving end is at a distance R from the rotation center,the torsional spring constant of the single beam about the z-axis becomesK zz=4EI yLN3RL2−3RL+1(4.13)Fig.4.28Interior beam con-figuration for in-plane tor-sionalsuspensions.where N is the number of folds in the beam.When the beam is located outside the mass as in Figure4.29and the moving end is at a distance R from the rotation center,the torsional spring constant of a single beam isK zz=4EI yLN3RL2+3RL+1(4.14)Fig.4.29Exterior beam configuration for in-plane torsionalsuspensions.Derivations of the torsional spring constants are presented in detail in[115].The interior beam configuration allows to achieve more compliant suspension systems with compact dimensions.However,large residual stresses in the structural layer could cause excessive curling.Exterior beam configuration minimizes curling,while consuming more die area.Thus,interior beams could be more suitable for bulkmicromachined low-stress devices,and exterior beams more suitable for surface micromachined devices.4.4Anisoelasticity and Quadrature ErrorMost of the major challenges in vibratory gyroscopes arise because of the fact that the magnitude of the sense-mode response amplitude is extremely small.Let us illustrate common order of magnitudes on an example gyroscope system.In Chapter 2,the sense-mode response amplitude of a matched mode gyroscope system with ωs=ωd was derived asy0matched=Ωz 2Q s x0m Cm sωs(4.15)If we consider a mode-matched gyroscope system with the total sense-mode mass equal to the mass that generates the Coriolis force,i.e.m s=m C,the ratio of the sense amplitude to the drive amplitude becomesy0matchedx0=2Q sΩzωs(4.16)Typical operation frequencies of vibratory gyroscopes are around f s=10kHz, yieldingωs=2π·10,000rad/s.Assuming a sense-mode quality factor Q s=1000, the sense to drive amplitude ratio for a1◦/s=π/180rad/s angular rate input is556 ppm.If the drive-mode amplitude is10µm,the sense-mode amplitude is5.56nm. This example illustrates a best case scenario,since it is based on a high-Q and mode-matched system.If the drive and sense modes are separated with∆f=100Hz,the sense response amplitude drops to0.16nm.In reality,fabrication imperfections result in non-ideal geometries in the gyro-scope structure,which in turn causes the drive oscillation to partially couple into the sense-mode.Even though several cross-coupling mechanisms such as elastic,vis-cous and electrostatic couplings exist,in most cases the elastic coupling in the sus-pension elements is the largest in magnitude.Considering the relative magnitudes of the drive and sense oscillations,even extremely small undesired coupling from the drive motion to the sense-mode could completely mask the Coriolis response.To investigate the dynamical effects of cross-coupling,let us start with the ideal system dynamics.The simplified dynamics of an ideal z-axis gyroscope system with the drive-mode along the x-axis and the sense-mode along the y-axis in vector form can be expressed asm d0 0m s¨x¨y+c x00c y˙x˙y+k x00k yxy=F d−2m CΩz˙x(4.17)where m C is the portion of the driven proof mass that contributes to the Coriolis force,m d is the total drive-mode mass,and m s is the total sense-mode mass.The total stiffness matrix is equal to the sum of the stiffness matrices of each suspension element in the system.Almost all suspension elements in real implementations of vibratory gyroscopes have elastic cross-coupling between their principal axes of elasticity.This phe-nomenon is called anisoelasticity,and is the primary cause of mechanical quadrature error in gyroscopes.The anisoelastic forces that result in elastic coupling between the x and y axes are modeled through the off-diagonal springs constants k xy and k yx in the system stiffness matrix.When these anisoelastic elements are included in the dynamics,the equations of motion becomem d0 0m s¨x¨y+c x00c y˙x˙y+k x k xyk yx k yxy=F d−2m CΩz˙x(4.18)Since the oscillation amplitudes in the sense-mode are orders of magnitude smaller than the drive-mode,the coupling spring k xy in the drive dynamics is negli-gible.The impact of anisoelasticity is primarily on the sense-mode dynamics due to k yx,which couples the drive-mode displacement into the sense-mode oscillator.The simplified sense-mode equation of motion with anisoelasticity can be expressed asm s¨y+c y˙y+k y y=−2mΩz˙x−k yx x(4.19) The total cross-coupling stiffness k yx in the suspension system is equal to the sum of the k yx values of each suspension beam.In an ideal gyroscope system with iden-tical springs located symmetrically,even if the cross-axis stiffness values of each individual spring are not zero,the off-diagonal cross-axis stiffness values exactly cancel out when added.Thus,the total k xy and k yx become zero,and the total stiff-ness matrix becomes diagonal.With a diagonal stiffness matrix,system eigenmodes align perfectly with the drive and sense axes.However,fabrication imperfections and variations are inevitable,and exist to a certain degree in every actual gyroscope structure.Non-uniform variations within the die result in slight differences among the suspension elements.Therefore,the off-diagonal terms do not exactly cancel out in real suspension systems,and yield residual off-diagonal terms in the total stiffness matrix.For z-axis gyroscopes,slight variation in the average widths of the suspension beams is the basic cause of suspension asymmetries which ultimately leads to anisoelasticity.The nominal cross-axis coupling values for folded beams(assum-ing L1∼L2and L C L1)and crab-leg suspensions are derived in[98]as。
a r X i v :m a t h /0609145v 1 [m a t h .A P ] 5 S e p 2006DAMPING ESTIMATES FOR OSCILLATORY INTEGRAL OPERATORS WITH FINITE TYPE SINGULARITIESAndrew Comech Department of Mathematics University of Toronto Toronto,Canada M5S 3G3Abstract.We derive damping estimates and asymptotics of L p operator norms for oscillatory integral operators with finite type singularities.The methods are based on incorporating finite type conditions into L 2almost orthogonality technique of Cotlar-Stein.1.Introduction and resultsThe oscillatory integral operators have the form (1.1)T λu (x )=R ne iλS (x,ϑ)ψ(x,ϑ)u (ϑ)dϑ,x,ϑ∈R n ,with S ∈C ∞(R n ×R n )and ψ∈C ∞comp (R n ×R n ).We denote h (x,ϑ)=det S xϑ.Ifh (x,ϑ)=0,then it is well-known that the L 2operator norm of T λdecays as λ−n2ANDREW COMECHWe already know[Co98]that if one of the projections from the canonical relation is a Whitney fold while the type of the other projection is at most k(k=1for a Whitney fold),then Tλ ≤constλ−n k)−1.This result was used to obtain the optimal regularity of Fourier integral operators with one-sided Whitney folds.In this paper,we approach a much more complicated situation when both pro-jections from the canonical relation are offinite type.We develop the machinery which yields the asymptotics of the norm of(1.1)with the integral kernel localized to the region where h(x,ϑ)∼ℏ,ℏbeing some small real number.We then derive the damping estimates on oscillatory integral operators:we will prove that if the symbol of the operator vanishes as|h(x,ϑ)|on the critical variety,then the operator has such properties as though it is associated to a canonical graph: Tλ ≤constλ−n2,2]).We assume that the corank of the mixed Hessian S xϑin(1.1)(and hence thedimension of kernels of dπL ,dπR)is at most1.Terminology.If the mapπL is of type at most l,then we will say that the operatorTλhas a singularity of type at most l on the left.Similarly with the singularity on the right.DAMPING ESTIMATES FOR OSCILLATORY INTEGRAL OPERATORS3 Theorem1.1.Let Tλbe an oscillatory integral operator of the form(1.2).We assume that rank S xϑ≥n−1and that Tλhas singularities of type at most l on the left and at most r on the right;we denote k=min(l,r),K=max(l,r). There are the following estimates on the L2→L2action of Tℏλ:Tℏλ ≤constλ−n2,ℏ≥λ−12ℏ−2,λ−(2+13,(1.4)Tℏλ ≤constλ−n2k,λ−(2+1k)−1,(1.5)Tℏλ ≤constλ−n−12k+12≤ℏ≤λ−(2+12(in a certain sense,this is the restriction due to the uncertainty principle).Remark.The estimate(1.6)is also applicable to Tλlocalized to the region where |h(x,ϑ)|≤2ℏ(that is,when we no longer require|h(x,ϑ)|≥ℏ/2).We will denote such an operator by¯Tℏλ:(1.7)¯Tℏλu(x)= R n e iλS(x,ϑ)ψ(x,ϑ)¯β(ℏ−1h(x,ϑ))u(ϑ)dϑ,¯β∈C∞comp([−2,2]).Let the functionsβand¯βsatisfy ± ∞j=1β(±2−j t)+¯β(t)=1,for any t∈R. Then we can decompose Tλas(1.8)Tλ= ± ℏ>ℏo T±ℏλ+¯Tℏoλ,ℏ=2−N,N∈N,where the cut-offvalueℏo is to be chosen properly.We can apply Theorem1.1to each Tℏλ(the estimates(1.3)-(1.5))and to¯Tℏλ(the estimate(1.6)).This gives the following estimate on Tλ:Corollary1.Under the assumptions of Theorem1.1,(1.9) Tλ ≤constλ−n2 1−12max(l,r) −1,with l and r being the types ofπL andπRat p.The supremum in(1.9)is taken overall points of C.There is certainly no loss of smoothness at non-singular points:we defineδ(0,0)=0.This is weaker(except when l=1or r=1)than the optimal result(proved in [PhSt97]for n=1)which we might expect:δopt(l,r)=1l+14ANDREW COMECHDamping estimates.We can use Theorem1.1for deriving the damping esti-mates.According to the estimates(1.3)–(1.6),the series ± ℏ>λ−12 ¯Tλ−12. Hence,if Uλis an operator like(1.1)but with a damping factor of magnitude ≤const|det S xϑ|,then Uλ ≤constλ−n/2.This proves the following result: Corollary2.Let Uλbe a compactly supported oscillatory integral operator of the form(1.1)with singularities offinite type on both sides.If the densityψvanishes on the critical varietyΣ={(x,ϑ)|det S xϑ(x,ϑ)=0}so that|ψ|≤const|det S xϑ|, then Uλhas the same decay of its L p→L p norm as non-singular oscillatory integral operators:(1.10) Uλ L p→L p≤constλ−n p−1(1.11)r,T±ℏλ L∞→L∞≤constℏ1DAMPING ESTIMATES FOR OSCILLATORY INTEGRAL OPERATORS5 on Tℏλhave a more complicated behavior:L1,L∞estimates become better for smaller values ofℏ,while L2estimates“blow up”asℏ→0.Therefore,L p→L p estimates on Tℏλimprove asℏ→0only if p is outside a certain neighborhood of p=2.In this case,the norms on the operators in the dyadic decomposition(1.8) only become better asℏbecomes smaller,and we conclude that the estimate on the entire Tλis determined by operators which are truncated offthe critical variety (large values ofℏ)and hence coincides with the norm of non-degenerate oscillatory integral operators.In a certain neighborhood of p=2,we need to glue the diverging L p estimateson Tℏλwith the estimate on¯Tℏoλ,at some pointℏo>λ−1r+1and for p>3,as a non-singular oscillatory integral operator:(1.13) Tλ L p→L p≤constλ−n p−1r+1,3<p≤∞. For r+22+(4+2r+1<p<3.At the endpoints p=r+22and3<p≤∞.We willnot discuss this issue here.6ANDREW COMECHL p-L q estimates.There are two more estimates which hold for both T±ℏλand¯Tℏλ:T±ℏλ L1→L∞≤const,which is trivially satisfied,andT±ℏλ L∞→L1≤constℏ,which is satisfied if d x,ϑ(det S xϑ)|Σ=0.The interpolation yields a variety of L p-L q estimates on Tλwhich we do not discuss.For the case of oscillatory integraloperators with two-sided Whitney folds,see[GrSe97b].We will prove Theorem1.2in Section2and Theorem1.1in Sections3,4,and5.ing finite type conditions:L1and L∞estimatesWe illustrate how thefinite type conditions work on the simplest example:wederive L1and L∞estimates formulated in Theorem1.2.We need certain prepa-ration:We choose local coordinates x=(x′,x n)andϑ=(ϑ′,ϑn)so that S x′ϑ′is non-degenerate(recall that the corank of S xϑis at most1),and consider the map πR|ϑas a composition(2.1)(x′,x n)π′−→(η′=Sϑ′(x,ϑ),x n)πs−→(η′,ηn=Sϑn).According to the condition of the theorem thatπR is of type at most r,we mayassume that(2.2)K rR h≥κR>0,where the vectorfield KR =(∂xn)η′=Sϑ′fixedhas the property KR|h(x,ϑ)=0∈Ker dπR.Its explicit form is(2.3)KR =(∂xn)η′=Sϑ′fixed=∂xn−Sϑ′x′Sx nϑ′∂x′,where Sϑ′x′(x,ϑ)is the inverse to the matrix S x′ϑ′at a point(x,ϑ).Proof of Theorem1.2.We will write the generic notationβfor the localizing func-tionsβ,¯β;the argument is the same for both T±ℏλand¯Tℏλ.The key propertyof these operators is the small size of the support of their integral kernels“in the critical direction”;we are to estimate this size using thefinite type conditions.We have:Tℏλu L1≤ dx dϑ|ψ(x,ϑ)β(ℏ−1h(x,ϑ))u(ϑ)|≤ u L1·const supϑdx|ψ(x,ϑ)β(ℏ−1h(x,ϑ))|.DAMPING ESTIMATES FOR OSCILLATORY INTEGRAL OPERATORS7 The bound which we need for the proof of(1.11),(2.4) dx|ψ(x,ϑ)β(ℏ−1h(x,ϑ))|≤constℏ1|det S x′ϑ′|dt|ψβ(ℏ−1h)|.We claim that the integration with respect to t contributes constℏ1rℏ1(r−1)!t r−1orσ1h′(t)≥κr!δr.The a priori bound|h(δ)−h(0)|<2ℏgives thedesired estimate onδ=|Iℏσ|.8ANDREW COMECHFor the L∞→L∞estimate,we deriveTℏλu L∞≤supx dϑ|ψ(x,ϑ)β(ℏ−1h(x,ϑ))u(ϑ)|≤ u L∞·const supx dϑ|ψ(x,ϑ)β(ℏ−1h(x,ϑ))|.As above,we may prove that if the map(x,ϑ)→(x,S x)is of type l,then dϑ|ψβ(ℏ−1h)|≤constℏ1DAMPING ESTIMATES FOR OSCILLATORY INTEGRAL OPERATORS 9so that only ℏ−1can be contributed during integrations by parts which will follow later in the argument.We continue the proof individually for each of the pieces of T ℏλwith fixed σ,ς.We use the “fine”partitions of 1,(3.3)1= X ∈Z nχ(ℏ−1η′−X ′)χ(ℏ−1x n −X n ),η′≡S ϑ′(x,ϑ),1=Θ∈Z nχ(ℏ−1ξ′−Θ′)χ(ℏ−1ϑn −Θn ),ξ′≡S x ′(x,ϑ),where χis a certain smooth function supported in the unit ball in R n .Multiplyingthe integral kernel of the operator T ℏλby the above functions,we decompose T ℏλinto T ℏλ= X,Θ∈Z nT ℏλ XΘ.Convexity.We will use the fact that the map πR |ϑ:x →S ϑ(x,ϑ)(and similarly πL |x )satisfies certain convexity condition:Given ϑ,then for any x ,y on a connected set where det S xϑ≥ℏ/2the following inequality holds:(3.4)|S ϑ(x,ϑ)−S ϑ(y,ϑ)|≥const ℏ|x −y |.Let us show (sketching the argument from [Co 97])that the property (3.4)is satisfiedon the support of each of σ,ς-pieces of T ℏλ.The map π′in (2.1)is a diffeomorphism and hence we may assume that |η′(x )−η′(y )|≥const |det S x ′ϑ′|·|x −y |.We now need to investigate the map πs |η′:x n →ηn =S ϑn (x,ϑ).Let us denote by L the line segment from (η′,x n )to (η′,y n ).We have:(3.5)|ηn (η′,y n )−ηn (η′,x n )|≥|y n −x n |·inf L|(∂x n )η′ηn |We need to show that the factor at |y n −x n |in the right-hand side of (3.5)is of magnitude ℏ,and then the inequality (3.4)follows.The value of the derivative (∂x n )η′ηn can be determined from the decompositionπR |ϑ=πs R |ϑ◦π′R |ϑ.Considering the determinants of the Jacobi matrices in (2.1),J (πs R |ϑ)·J (π′R |ϑ)=J (πR |ϑ),we obtain (∂x n )η′ηn ·det S x ′ϑ′=h (x,ϑ).Hence,Lemma 3.1.There is the relation (∂x n )η′ηn =h (x,ϑ)4everywhere on L .Hence,we admit that the line segment L could be not entirely on the support of the integral kernel of T ℏ,where h ≥ℏ/2.Proof.Let t be a parameter on the line segment L ,changing from t =0at the point (η′,x n )to t =|x n −y n |at the point (η′,y n ).We consider h (x,ϑ)|L as a function of10ANDREW COMECHt;∂t=(∂xn )η′.Since both(η′,x n)and(η′,y n)are on the support ofσ,ς-piece ofTℏλ,we know that at t=0and at t=|x n−y n|h≥ℏ/2,(3.6)σj·(∂t)j h≥−ℏ,∀j∈N,j<r.(3.7)Due to thefinite type conditions on both projections from C,we also know that (∂t)r h>0(or instead<0),for all t between0and|x n−y n|(see(2.2)).If we assumed that in(3.6)and(3.7)ℏ=0,then we would conclude by induction that all(∂t)j h(t),j<r,were monotone functions which did not change the signs between t=0and t=|x n−y n|,and hence h(t)would be concluded monotone (see the proof of Lemma2.1).Sinceℏ=0,the above conclusion is true modulo the error of magnitudeℏ;hence,the function h(t)is“almost monotone”(its derivative is greater than−constℏor less than constℏ),therefore the value of h(t)can not drop belowℏ/4as long as t is between0and|x n−y n|and as long as at the boundary points the value of h is not less thanℏ/2.We also need to assume that|x n−y n|is not too large.4.Almost orthogonality relations for different piecesWe are going to apply the Cotlar-Stein lemma on L2almost orthogonality[St93]. For our convenience,let us formulate this result here.Cotlar-Stein Lemma.Let E and F be the Hilbert spaces,and let{T i|i∈Z}be a family of continuous operators E→F which satisfy the following conditions:(4.1) T∗i T j ≤a(i,j), T i T∗j ≤b(i,j),where a(i,j)and b(i,j)are non-negative functions on Z×Z.If a and b satisfy(4.2)A≡supi j a12(i,j)<∞,then the formal sum i T i converges(in the weak operator topology)to a continuous operator T:E→F,which is bounded by(4.3) T ≤A12.The details of the proof are in[St93].Now we are going to investigate the almost orthogonality relations for the oper-ators Tℏλ XΘ,with respect to different multi-indexes{XΘ}.Almost orthogonality with respect to differentΘ,W.Let us consider the behavior of the compositions Tℏλ XΘ Tℏλ ∗Y W with respect to differentΘand W. We will show that if X and Y arefixed and if W is alsofixed,then the composition Tℏλ XΘ Tℏλ ∗Y W is different from zero only forfinitely many values ofΘ.The integral kernel of such an operator is given byKΘW(x,y)= R n dϑχ(ℏ−1S x′(x,ϑ)−Θ′)χ(ℏ−1S y′(y,ϑ)−W′)(4.4)χ(ℏ−1Sϑ′(x,ϑ)−X′)χ(ℏ−1S w′(y,ϑ)−Y′)×...,and in addition we know that x n≈ℏX n,y n≈ℏY n,andϑn≈ℏΘn≈ℏW n.(Each time,the error is at mostℏ.)Let us consider the following system:(4.5) S y′(y′,y n,ϑ′,ϑn)=ℏW′,Sϑ′(y′,y n,ϑ′,ϑn)=ℏY′.Given y n,ϑn,Y′,and W′,we can solve this system for y′andϑ′,since the matrix ∂(ℏW′,ℏY′).[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]2NThe factorℏin the denominator reflects the contribution ofℏ−1from each integra-tion by parts(to estimate the contribution of certain terms,one needs to refer to (3.4)).We claim that|Sϑ(x,ϑ)−Sϑ(y,ϑ)|≥const(ℏ|X′−Y′|+ℏ2|X n−Y n|).Forℏ|X n−Y n|≤|X′−Y′|this inequality is trivial,while forℏ|X n−Y n|≥|X′−Y′| we use the convexity property(3.4)ofπR:|Sϑ(x,ϑ)−Sϑ(y,ϑ)|≥constℏ|x−y|≥constℏ2|X n−Y n|.Now we may rewrite the right-hand side of(4.7)asconst[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]Nand apply the Schur lemma:Tℏλ XΘ Tℏλ ∗Y W ≤ d n x K Tℏλ XΘ Tℏλ ∗Y W (x,y)≤const[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]N.We will integrate in xfirst.Ifℏ≥λ−1[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]N= d n{Sϑ}[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]N is bounded by const(λℏ)−nℏ−1.If insteadℏ≤λ−1[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]N= d n−1{Sϑ′}[1+λℏ|Sϑ(x,ϑ)−Sϑ(y,ϑ)|]N.This expression is bounded by≤const(λℏ)−n+1ℏ:(λℏ)−n+1is due to the integration in Sϑ′,andℏis due to the integration in x n.The integration with respect toϑis performed as follows:dϑnχ(...)= d n−1{S y′}dϑnWe conclude that(4.8) Tℏλ XΘ Tℏλ ∗Y W ≤constτ2 1+λℏ2(|X′−Y′|+ℏ|X n−Y n|) −N, whereτ2=min(λ−nℏ−1,λ−n+1ℏ2).One may think ofτas of the L2-estimate on a generic operator Tℏλ XΘ.Let us rewrite(4.8)as(4.9) Tℏλ XΘ Tℏλ ∗Y W ≤τ2a(X,Θ;Y,W),where a(X,Θ;Y,W)∈C(Z4n;R+)is some function which“measures”the orthog-onality of operators.Similarly to(4.2),we define(4.10)A=supY,W X,Θa12(X,Θ;Y,W).By the symmetry,we know that the summation with respect to X in(4.12)is over afinite subset in Z n.We analyze the summation in X in four different cases:ℏ≥λ−1r)−1≤ℏ≤λ−1l)−1≤ℏ≤λ−(2+12≤ℏ≤λ−(2+13.The simplest case is whenℏ≥λ−12ℏ,λ−n2),which is the root of the common factor in(4.9),(4.11),times the geometric mean of A and B:(4.13) Tℏλ ≤τ√2ℏ−1AB≤constλ−n2,ℏ≥λ−1The case λ−(2+13.Again,for each X ,the summation in ΘinA = X,Θa12(X,Θ;Y,W )≤const(λℏ3)−1.Similarly,B =X,Θb12ℏ√2ℏ−2,λ−13.The case λ−(2+1r )−1.The estimate (4.15)is clearly inadequatefor small values of ℏ:its derivation is based on the assumption that det S xϑ=0,and as a consequence the estimate blows up when ℏ→0and does not allow to estimate the contribution of some tiny neighborhood of the critical variety {det S xϑ=0}.Let us get another estimate on A ,trying to count “non-orthogonal terms”directly.In (4.14),we evaluated the sum assuming that the number of terms with different X n is infinite,while certainly X n takes at most const ℏ−1values.More than that,ifthe projection πR is of type r ,then there are only const ℏ−1+1r(this is gained by themethods which are very much the same as in Section 2;we will show this in more detail in Section 5).This leads to the following bound on A in (4.10):(4.16)A ≤const ℏ−1+1r )−1,then(4.16)gives a better bound on A than (4.14).We assume that ℏ≥λ−(2+12ℏr(λℏ3)−1≤const λ−n2r.The case λ−1l )−1.In this region,the best bounds on both A andB are due to the finiteness of types of the projections πL and πR :A ≤const ℏ−1+1l .This gives(4.18)T ℏλ ≤const λ−n −1ℏ−1+1l≤const λ−n −12l +1rand B ≤const ℏ−1+15.Almost orthogonality and finite type conditionsWe are left to prove the bound(4.16).As in Section2,we consider the mapπR|ϑas decomposed into(5.1)(x′,x n)π′−→(η′=Sϑ′(x,ϑ),x n)πs−→(η′,ηn=Sϑn).SinceπR is of type at most r,we may assume that on the support of the integralkernel of the operator Tλwe have a uniform bound(5.2)(∂xn )rη′h≥κR>0.We work in the space(η′,x n).Consider the line segment L which connects the points(η′(x,ϑ),x n)and(η′(y,ϑ),y n).There are two cases:•The line segment L is outside the cℏ1−1r|x n−y n|.We derive that the gradient of the phase function,λ(Sϑ(x,ϑ)−Sϑ(y,ϑ)),is bounded in the absolute value from below byλ|Sϑ′(x,ϑ)−Sϑ′(y,ϑ)|≥1r|x n−y n| .Similarly to how we arrived at(4.8),we derive that for any integer NTℏλ XΘ Tℏλ ∗Y W ≤constλ−n+1ℏ2 1+λℏ2 |X′−Y′|+cℏ1−1r|X n−Y n| −N≤const c−1ℏ−1+12.)•Now assume that the line segment L from(η′(x),x n)to(η′(y),y n)is inside the cℏ1−1r,then,using(5.2),we will show that(5.4)|h(x,ϑ)−h(y,ϑ)|∼κR(ℏ|L|)r,where|L|≡dist[(η′(x),x n),(η′(y),y n)].Since the left-hand side of(5.4)can not be greater than4ℏ(the value of|h|at both points(x,ϑ)and(y,ϑ)is bounded by2ℏ),we gain the bound|L|≤constℏ1r,which again leads to(4.16).The detailed proof of(5.5)is in[Co98];for the reader’s convenience,we give here the sketch.Let t be a parameter on the line segment L,which changes from t=0 atπ′(x)to t=|L|atπ′(y).We consider h as a function of t.Since L is in the cℏ1−1r).At the points(x,ϑ)and(y,ϑ),σj K jRh≥−ℏ;we assume c is so small that(5.6)σj h(j)(t)≥−ℏ1−12>0,for any t between0and|L|.If we assumed thatℏ=0in the right-hand side of(5.6),then,similarly to the argument in the proof of Lemma2.1,we would conclude that the derivatives h(j)(t) of all orders j<r were monotone functions which did not change the signs betweent=0and|L|.Moreover,we would derive that|h(|L|)−h(0)|≥κRr!.Since at the endpoints of L the values ofσj h(j)are only greater than−ℏ1−1r|L|).We arrive at(5.8)|h(|L|)−h(0)|≥κRr!−constℏ1−1r,and this proves(5.5).References[Ch85]M.Christ,Hilbert transforms along curves,Ann.of Math.122(1985),575–596. [Co97] ech,Integral operators with singular canonical relations,in:Spectral theory, microlocal analysis,singular manifolds,M.Demuth,E.Schrohe,B.-W.Schulze,andJ.Sj¨o strand,eds,Akademie Verlag,Berlin,1997,pp.200–248.[Co98] ech,Optimal estimates for Fourier integral operators with one-sided folds, preprint(1997).[Cu97]S.Cuccagna,L2estimates for averaging operators along curves with two sided k fold singularities,Duke Journal89(1997),203–216.[GrSe94] A.Greenleaf and A.Seeger,Fourier integral operators with fold singularities,J.Reine Angew.Math.455(1994),35–56.[GrSe97a],On oscillatory integral operators with folding canonical relations,preprint (1997).[GrU91] A.Greenleaf and G.Uhlmann,Composition of some singular Fourier integral oper-ators and estimates for restricted X-ray transforms.II,Duke Math.J.64(1991),415–444.[H¨o85]L.H¨o rmander,The analysis of linear partial differential operators IV,Springer-Verlag,1985.[MeT85]R.B.Melrose and M.E.Taylor,Near peak scattering and the corrected Kirchhoffapproximation for a convex obstacle,Adv.in Math.55(1985),242–315.[Mo65] B.Morin,Canonical forms of the singularities of a differentiable mapping,C.R.Acad.Sci.Paris260(1965),6503–6506.[Pa91]Y.B.Pan,Uniform estimates for oscillatory integral operators,J.Funct.Anal.100 (1991),207–220.[PaSo90]Y.B.Pan and C.D.Sogge,Oscillatory integrals associated to folding canonical rela-tions,Colloq.Math.61(1990),413–419.[Ph94] D.H.Phong,Singular integrals and Fourier integral operators,in:Essays on Fourier Analysis in honor of Elias M.Stein,C.Fefferman,R.Fefferman,and S.Wainger,eds,Princeton Univ.Press,1994,pp.287–320.[Ph95],Models of degenerate Fourier integral operators and Radon transforms,Ann.of Math.140(1994),703–722.[PhSt97]。