三支脚并联运动机床的特点及典型应用
- 格式:pdf
- 大小:125.86 KB
- 文档页数:2

并联运动机床概述并联运动机床是指多个工作台或刀架可以同时进行运动的一种机床。
它通过使用多个独立的工作台或刀架,使得机床在同一台机床上可以同时进行多个加工操作。
这种机床一般由主轴、驱动装置、工作台和控制系统组成。
并联运动机床在工业生产中具有广泛的应用,可以提高工作效率,节约生产成本,对于批量生产和多种类型产品的加工都具有较大的优势。
首先,从加工效率上来看,由于并联运动机床可以同时进行多个工艺操作,可以大大缩短加工时间。
例如,在铣床和镗床的组合机床中,通过同时进行铣削和镗削操作,可以使得零件的加工时间减少一半以上。
这对于生产效率提高有着明显的作用。
其次,从生产成本上来看,由于并联运动机床可以在同一台机床上完成多个工艺操作,减少了物料的输送和处理环节,降低了生产线的长度和设备数量,节约了生产空间。
同时,只需要一个操作工人,减少人工成本。
另外,并联运动机床的能耗也较低,不仅节能环保,还能降低生产成本。
此外,并联运动机床还有以下几个优点:一是具有高精度和高稳定性,可以保证产品的质量和稳定性。
二是具有较强的适应性,可以根据不同的加工要求进行调整和改装。
三是具有较好的安全性,由于多个工作台或刀架可以同时进行运动,避免了工件的迎剪和碰撞现象,减少了事故的发生。
不过,并联运动机床也存在一些不足之处。
首先,由于机床结构复杂,维护和保养难度较大。
其次,并联运动机床的控制系统需要进行复杂的编程和调试,需要专业的技术人员进行操作和维护。
另外,并联运动机床的投资成本较高,对于一些小企业来说可能承担不起。
综上所述,并联运动机床具有较高的加工效率和生产效果,对于提高企业的生产能力和竞争力有着积极的作用。
随着制造业的发展,越来越多的企业开始采用并联运动机床。
未来,随着科技的不断进步和机床制造技术的提高,相信并联运动机床会在产业生产中发挥越来越重要的作用。

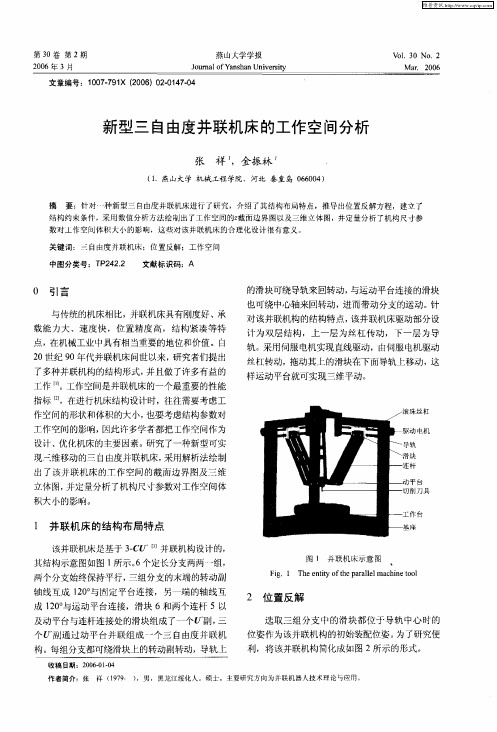
并联运动机床与传统机床的比较并联运动机床与传统机床的构造见下列图所示。
并联运动机床与传统机床的比较并联运动机床是以机床框架为固定平台的若干个杆件组成空间并联机构,主轴部件安装在并联机构的动平台上,工作台与机床框架连接在一起。
改变杆件的长度或移动杆件的支点,按照并联运动学原理形成刀具相对于被加工零件的运动轨迹。
并联运动机床与传统机床相比,具有以下优异的性能:运动精度高。
可实现高速加工。
机床刚性好。
构造简单。
由于并联运动机床具有上述显著优点,目前已成为高速高效高柔性加工设备的一个新的发展方向,但是它也存在一些缺点,如控制计算极其复杂,杆件的热变形对机床的加工精度影响比较严重,机床加工的有效空间相对于机床本身体积所占比例较小。
并联运动机床的主要部件相对于传统机床,并联运动机床机械构造简单,模块化程度高,并且具有可重构性。
并联运动机床主要由主轴、杆件及其驱动等机电—体化功能部件及固定平台、动平台、框架等组成。
(1)主轴部件并联运动机床的主轴大多数采用电主轴,其电动机的转子和主轴是一体的,无需任何机械连接。
主轴转速的调节采用变频调速,改变电动机的供电频率,即可实现主轴转速的调节。
下列图为IBAG公司生产的主轴系统。
主轴系统主要包括电主轴及安装调整板、可编程控制器和主轴驱动、主轴冷却系统和润滑系统、刀具夹紧液压系统等组成。
主轴系统(2)杆件杆件是并联机构的运动输入构件。
杆件的物理构造包括机械构件、电气器件、液压部件以及它们的组合,可分为固定杆长和可变杆长两大类。
可变杆长的并联机构,杆件的基点固定,杆件的工作长度可变;固定杆长的并联机构,杆件的长度固定不变,杆件的基点位置可以变化。
从运动学的角度来看,杆件是具有一定刚度的刚体,杆件长度的变化或杆件基点的移动决定了动平台(主轴部件)的运动速度、加速度、位置和姿态。
下列图是固定杆长杆件。
杆件的两端安装有万向铰链,分别用于连接直线电动机滑板和主轴部件动平台。
杆件由管材制成,通过螺纹与万向铰连接。


《微动三指串并联机械手指的研究》篇一一、引言随着机器人技术的快速发展,机械手指作为机器人手部的重要部分,其研究与应用日益受到关注。
微动三指串并联机械手指作为一种新型的机械结构,具有灵活度高、操作精确、适应性强等优点,在工业生产、医疗康复、军事等领域具有广泛的应用前景。
本文旨在研究微动三指串并联机械手指的构造、原理及其应用,为相关研究与应用提供理论支持和实践指导。
二、微动三指串并联机械手指的构造与原理微动三指串并联机械手指主要由三个串并联的指节构成,每个指节通过电机驱动、传感器控制,实现灵活的弯曲与伸展。
其中,每个指节由驱动模块、传感器模块和结构模块三部分组成。
驱动模块采用微电机,具有体积小、功率大、控制精度高等优点。
传感器模块则采用力传感器和位置传感器,实时监测指节的弯曲程度和受力情况,为电机提供精确的控制信号。
结构模块则采用轻质高强的材料,保证指节的灵活性和耐用性。
在原理方面,微动三指串并联机械手指通过电机驱动指节弯曲与伸展,实现抓取、夹持等动作。
同时,通过传感器实时监测指节的弯曲程度和受力情况,实现精确控制。
此外,三个指节的串并联结构使得机械手指具有更好的灵活性和适应性,能够适应不同形状和大小的物体。
三、微动三指串并联机械手指的应用微动三指串并联机械手指具有广泛的应用前景。
在工业生产中,它可以替代人工进行重复性、高强度的抓取工作,提高生产效率。
在医疗康复领域,它可以用于帮助患者进行康复训练,提高患者的生活质量。
在军事领域,它可以用于执行危险、复杂的任务,保障人员的安全。
四、实验研究与分析为了验证微动三指串并联机械手指的性能,我们进行了相关实验研究。
首先,我们对机械手指的驱动模块、传感器模块和结构模块进行了性能测试,确保其满足设计要求。
然后,我们在不同环境下对机械手指进行了抓取实验,测试其抓取不同形状和大小的物体的能力。
实验结果表明,微动三指串并联机械手指具有较高的灵活性和适应性,能够满足不同应用场景的需求。
同济大学--张曙典型的并联运动机床(1)简介早期的并联运动机床 1994年,在美国芝加哥国际机床展览会上,美国Giddings & Lewis公司首次展出了Variax型并联运动机床,引起轰动。
它是一台以Stewart平台为基础的5坐标立式加工中心,标志着机床设计开始采用并联机构,是机床结构重大改革的里程碑,其内部结构如图1所示。
从图中可见,6根由伺服电动机驱动的伸缩杆,借助万向铰固定在下平台上,这种结构也被称为6条腿 (Hexapod),丝杆的螺母通过万向铰支承着上平台。
杆件长度的伸缩使带有主轴部件的上平台完成加工零件所需的运动。
Variax型加工中心是一种内铣型结构,机床占地面积为7800mm′8180mm,而工作空间仅有700mm′700mm′750mm,安装工件也不太方便,因此没有在生产中获得应用。
后来该机床提供给英国诺廷汉大学工学院作为进行航空工业敏捷制造项目研究的设备。
嗣后,美国Ingersoll公司推出采用并联机构的VOH 1000型立式加工中心和HOH 600型卧式加工中心,在结构上作了最大改进,从内铣型改为外铣型,明显缩小动平台的体积,减轻了运动部件的重量,安装工件也较为方便,对并联运动机床的发展曾经产生很大的影响。
但是由于种种原因,Ingersoll机床也没有投入生产实际应用。
两台VOH 1000型立式加工中心分别交付给美国国家标准和技术研究所和美国国家宇航局进行研究。
HOH 600型加工中心提供给德国阿亨工业大学的机床实验室进行研究。
它们的研究结果对并联运动机床的发展起到很大的促进作用。
Ingersoll公司HOH 600型的外观如2所示。
通过早期并联运动机床的试验研究表明,并联运动机床与传统机床比较,具有一下优点:1) 运动部件质量小,运动惯性小;2) 高运动速度和高加速度,适合高速加工;3) 主要部件具有重复性,通用程度高;4) 容易通过预加载荷,提高机床部件的刚度;5) 通过控制系统可以实现运动精度的补偿。
3自由度并联机床的运动学和动力学研究摘要:中国东北大学已经研制出一种用于钢坯研磨的新型3自由度并联机床。
它具有结构简单,刚度大的优点,更高的力量重量比,较大的工作空间,简单的运动学方程,没有运动的奇异位姿。
在使用相应刀具情况下该机器人可用于磨削,研磨,抛光等加工过程。
在本文中,介绍了简单的机器人的结构和自由度,运动学和工作空间,精度分析,静态和动态的分析及其相关参数。
关键词:并联机床;运动学;动力学;3自由度1.前言与传统机床相比,并联机床具有更高的精度,高刚度的优点,和更高的刚度质量比,所以近些年它得到了行业和机构大量的研究和评估。
由美国Giddings & Lewis公司研制的“六足虫”并联机床被认为是21世纪机床领域中的革命性理念。
然而这个Stewart平台存在运动耦合的缺点,并且具有复杂的运动学和构件要求十分严格。
这类少于六自由度并联机床在行业和机构也因此受到越来越多的关注。
意大利Comau研制出了一种命名为Tricept的四条腿的的三自由度并联机床。
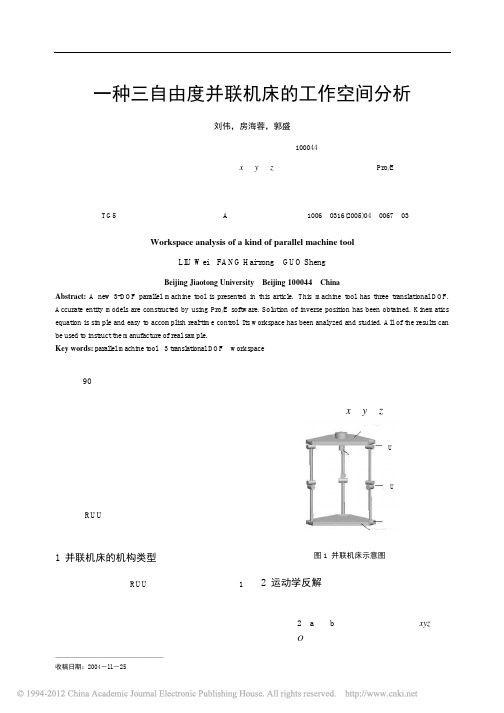
东北大学已经开发出了一种新型三自由度的三腿平行磨削机床(图1)。
与“六足虫”并联机床相比,此三腿平行磨削并联机床具有以下优点:(1)结构简单且具有更大工作空间;(2)动力学方程简单便于控制操作;(3)在工作空间没有运动耦合状态。
图12.并联机床2.1 3自由度系统的布局该三自由度并联机构由一个移动平台,基础平台,一个平行的联动和三条腿的连接两个平台。
中间腿支链控制的移动平台的三个自由,如图2所示。
移动平台的转换是由平行连杆机构控制。
图22.2 运动学和工作空间移动平台平行于基础平台,一个坐标系统(O- X,Y,Z)选择如图2所示,这种机制的逆向运动学正解方程可以表示为:123l l l ===其中w=a-b,2m = ,n=w/2 ,a 和分别表示基础平台的两侧的长度和等边三角形状的移动平台的长度。
该机构的位置正解方程可表示为:2222222132X l l w Y w Z =-+==从公式1和2可知系统在整个工作空间无奇异位姿和运动耦合。
来自/jxzb/part3/part3-chapter2-101.html并联运动机床概述并联运动机床是以空间并联机构为基础,充分利用计算机数字控制的潜力,以软件取代部分硬件,以电气装置和电子器件取代部分机械传动,使将近两个世纪以来以笛卡儿坐标直线位移为基础的机床结构和运动学原理发生了根本变化。
1994年,美国 Giddings & Lewis 公司展出第一台并联运动机床:Variax 加工中心,该机床现在英国 Nottingham 大学工学院;1996年,美国 Ingersoll 公司推出VOH1000型立式加工中心和HOH600型卧式加工中心,现分别在美国国家标准与技术研究所和德国阿亨工业大学机床实验室。
Variax 型加工中心HOH 600型卧式加工中心通过早期并联运动机床的试验研究表明,并联运动机床与传统机床比较,具有以下特点:1) 运动部件质量小,运动惯性小;2) 高运动速度和高加速度,适合高速加工;3) 主要部件具有重复性,通用程度高;4) 容易通过预加载荷,提高机床部件的刚度;5) 通过控制系统可以实现运动精度的补偿。
并联机构概念设计并联机构(Parallel mechanism)是由2个和2个以上的驱动器(作动器)通过杆系同时作用于运动平台的空间运动机构。
它的特点是,所有的分支机构可同时接受驱动器的输入,而最终共同给出输出,并联机构在机构学上是多路闭环机构。
在工业中,3杆并联机构(Tripod)和6杆并联机构(Hexapod)应用最为广泛,如Delta 机器人和 Tricept 机器人是典型的3杆并联机构,而Stewart 平台是典型的 6杆并联机构。
其机构如下图所示:6自由度的Delta并联机构Stewart 运动平台概念设计的主要内容:1)机构综合。
根据加工要求,选定并联运动机构所需的自由度,建立相应的运动学模型。
2)空间位置分析及坐标转换。
并联运动机床的空间位置分析比较复杂,位置分析法分为正解法和逆解法。
并联机床一定义:并联机床(Parallel Machine Tools),又称并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫(Hexapods)。
并联机床是基于空间并联机构Stewart平台原理开发的,是近年才出现的一种新概念机床,它是并联机器人机构与机床结合的产物,是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
它克服了传统机床串联机构刀具只能沿固定导轨进给、刀具作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷,可实现多坐标联动数控加工、装配和测量多种功能,更能满足复杂特种零件的加工。
自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
2.并联机床的特点整体而言,传统的串联机构机床,是属于数学简单而机构复杂的机床,而相对的,并联机构机床则机构简单而数学复杂,整个平台的运动牵涉到相当庞大的数学运算,因此虚拟轴并联机床是一种知识密集型机构。
这种新型机床完全打破了传统机床结构的概念,抛弃了固定导轨的刀具导向方式,采用了多杆并联机构驱动,大大提高了机床的刚度,使加工精度和加工质量都有较大的改进。
另外,由于其进给速度的提高,从而使高速、超高速加工更容易实现。
由于这种机床具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点,在许多领域都得到了成功的应用,因此受到学术界的广泛关注。
由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。
随着高速切削的不断发展,传统串联式机构构造平台的结构刚性与移动台高速化逐渐成为技术发展的瓶颈,而并联式平台便成为最佳的候选对象,而相对于串联式机床来说,并联式工作平台具有如下特点和优点:结构简单、价格低。