浙大考研资料-浙大控制原理1-5章复习
- 格式:pptx
- 大小:350.23 KB
- 文档页数:22
浙大控制系专业课考研心得如何准备初试我在这里写的关于自动控制原理的专业复习,只是我本人的一点点心得,希望可以给大家一点启发。
自动控制原理是自动化专业的专业核心课程之一,浙大是在大三上学期开课的,对于自动控制原理的学习,主要归结为以下几个阶段:第一、开课阶段,即使你本科不是浙大的,但是学习自动控制原理课程的内容是和浙大基本类似的,所以如果这个学期刚好开了自动控制原理这门课,那就请把第一点看完,应该有所收获。
自动控制原理课程的基础是:数学基础:拉氏变换、傅立叶变换、Z变换(复变函数或者信号与系统课程内容)、矩阵的变换(线性代数内容)专业基础:电路分析,机械原理、电机拖动(或相关课程)这部分的内容不需要全掌握,需要时查书也可以。
自动控制原理课程的学习方法:1,通读章节目录和绪论部分。
原因很简单,这门课程涉及的知识面很广,教材也厚薄不同。
但是知识体系必须首先掌握。
通过阅读这部分内容我们可以知道哪些是重点,哪些是非重点。
2,分章节归纳基本概念,基本原理和基本方法当然在考试的时候是绝对不会考死背的东西,归纳的目的在于熟悉基本理论,以便于在后面的学习中更好的理解知识点。
这部分的工作应该在每章学习完之后马上整理,如果推迟的话,又要重新看一遍,比较费时。
3,知识点的归纳这点非常重要,归纳的目的就是要把这个课程整理成自己的结构框架。
以便于今后的复习。
这个整理可以适当参考要报考学校的考试大纲。
一般考试大纲对知识点的分布还是覆盖比较全面的。
比如:数学模型:结构图、微分方程、传递函数、状态空间方程等。
(必须掌握的建模方法,需要理解和了解的知识点自己标示出来。
)4,课后习题。
我认为既然要专业考试的内容就是做题,那么课后习题是不能放过的,而且有老师的指导学习起来会有事半功倍的效果。
所以尽量把课后习题做完,做对。
整理出每个题考察的知识点。
5,辅导书的问题。
这个问题,我觉得还是有必要找一些比较权威,全面的辅导材料来学习的。
一般好一点的辅导书会指出本章重点,难点。
《自动控制原理》课程考试复习要点第1章控制原理绪论一、主要内容1、自动控制的概念,控制系统中各部分名称及概念2、开环控制于闭环控制的区别,负反馈原理3、系统的分类4、方框图绘制(原理图)5、对自动控制系统的一般要求(稳、准、快)二、自动控制概念中的基本知识点1、闭环系统(或反馈系统)的特征:采用负反馈,系统的被控变量对控制作用有直接影响,即被控变量对自己有控制作用。
2、典型闭环系统的功能框图。
自动控制在没有人直接参与的情况下,通过控制器使被控对象或过程按照预定的规律运行。
自动控制系统由控制器和被控对象组成,能够实现自动控制任务的系统。
被控制量在控制系统中.按规定的任务需要加以控制的物理量。
控制量作为被控制量的控制指令而加给系统的输入星.也称控制输入。
扰动量干扰或破坏系统按预定规律运行的输入量,也称扰动输入或干扰掐入。
反馈通过测量变换装置将系统或元件的输出量反送到输入端,与输入信号相比较。
反送到输入端的信号称为反馈信号。
负反馈反馈信号与输人信号相减,其差为偏差信号。
负反馈控制原理检测偏差用以消除偏差。
将系统的输出信号引回插入端,与输入信号相减,形成偏差信号。
然后根据偏差信号产生相应的控制作用,力图消除或减少偏差的过程。
开环控制系统系统的输入和输出之间不存在反馈回路,输出量对系统的控制作用没有影响,这样的系统称为开环控制系统。
开环控制又分为无扰动补偿和有扰动补偿两种。
闭环控制系统凡是系统输出端与输入端存在反馈回路,即输出量对控制作用有直接影响的系统,叫作闭环控制系统。
自动控制原理课程中所讨论的主要是闭环负反馈控制系统。
复合控制系统复合控制系统是一种将开环控制和闭环控制结合在一起的控制系统。
它在闭环控制的基础上,用开环方式提供一个控制输入信号或扰动输入信号的顺馈通道,用以提高系统的精度。
自动控制系统组成组成一个自动控制系统通常包括以下基本元件1.给定元件给出与被控制量希望位相对应的控制输入信号(给定信号),这个控制输入信号的量纲要与主反馈信号的量纲相同。
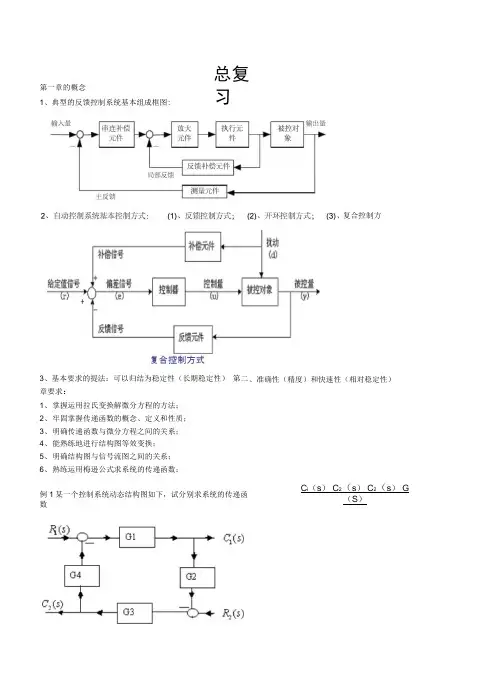
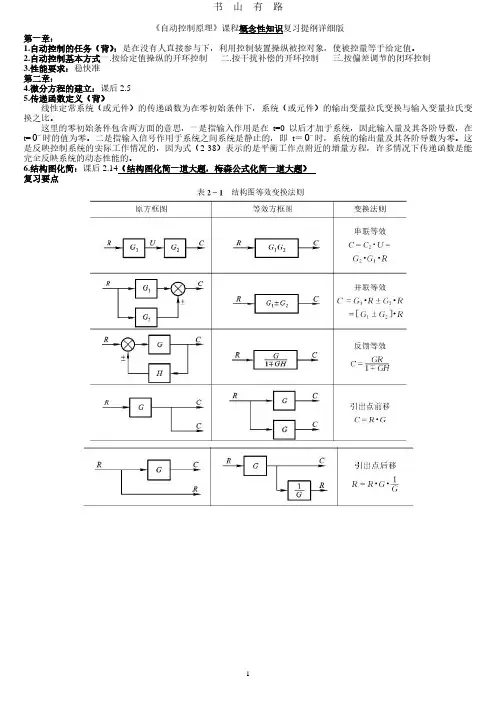
第一章的概念1、典型的反馈控制系统基本组成框图:复合控制方式3、基本要求的提法:可以归结为稳定性(长期稳定性) 第二章要求:1、 掌握运用拉氏变换解微分方程的方法;2、 牢固掌握传递函数的概念、定义和性质;3、 明确传递函数与微分方程之间的关系;4、 能熟练地进行结构图等效变换;5、 明确结构图与信号流图之间的关系;6、 熟练运用梅逊公式求系统的传递函数;例1某一个控制系统动态结构图如下,试分别求系统的传递函数总复习、准确性(精度)和快速性(相对稳定性) C i (s ) C 2(s ) C 2(s ) G(S )复合控制方C i (s) _ G,s)C 2(s)R i (s)1 - G 1G 2G 3G 4 R i (s)-G 1G 2G 31 - G 1G 2G 3G 4C(s) C(s) E(s) E(S) R(s),N(s),R(s),N(s)例3: 例2某一个控制系统动态结构图如下,试分别求系统的传递函数:EG.7)► * kG 1(S )G2(S )C(s) _R(s) 1 G 1(s)G 2(s)H(s) C(s)-G 2 (s) N(s) 一 1 G,S )G 2(S )H(S )r(t) - u 1 (t) i (t) m「1(t ) R 115(t) = J 川dt)-i 2(t)]dtMy)J(t)R 2C(t)二 1 i 2(t)dtC2将上图汇总得到:R(s) +l i (s) +U i (s)l 2(s)U 1(s )*l 2(s)C(s)1 C 1sC(s)I i (s)U i (s)I2G)(b)例5如图RLC 电路,试列写网络传递函数U c (s)/U r (s).例6某一个控制系统的单位阶跃响应为:C(t) =1 -2e't • e ,,试求系统的传递函数、微分方程和脉冲响应。
解:传递函数:2〜、3s +2 八厶八、计 d c(t)丄小dc(t )丄小/八 cdr(t)丄“、 G(s),微分万程: 2 3 2c(t)=3 2r(t)(s + 2)(s+1)dt 2 dt dt脉冲响应:c(t)二-e‘ 4e'2tk =1例4、一个控制系统动态结构图如下,试求系统的传递函数。
![第二章-5-系统传递函数的计算[1]自动控制原理 浙江大学考研资料](https://uimg.taocdn.com/caefca7f31b765ce04081401.webp)
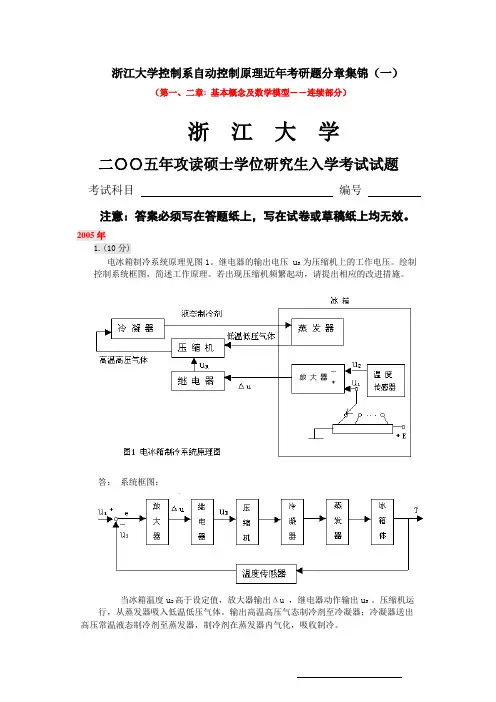
浙江大学控制系自动控制原理近年考研题分章集锦(一)(第一、二章: 基本概念及数学模型――连续部分)浙江大学二〇〇五年攻读硕士学位研究生入学考试试题考试科目编号注意:答案必须写在答题纸上,写在试卷或草稿纸上均无效。
2005年1.(10分)电冰箱制冷系统原理见图1。
继电器的输出电压u R 为压缩机上的工作电压。
绘制控制系统框图,简述工作原理。
若出现压缩机频繁起动,请提出相应的改进措施。
答:系统框图:当冰箱温度u2高于设定值,放大器输出Δu ,继电器动作输出u R 。
压缩机运行,从蒸发器吸入低温低压气体。
输出高温高压气态制冷剂至冷凝器;冷凝器送出高压常温液态制冷剂至蒸发器,制冷剂在蒸发器内气化,吸收制冷。
改进措施:调小放大器放大倍数,或选用灵敏度较小的继电器,或者两者兼而用之。
2.(10分)系统框图见图2-1,要求将系统等效变换成图2-2,图2-3框图结构,并求H(S),G(S)表达式。
图2-1 图2-2 图2-3 解:H(S)= 1+2() KG SG(S) =2004年一.(20分/150分)如图1所示,U1(t),U2(t)分别是输入电压和输出电压。
X3,X2分别是输入位移和输出位移,X1则是C点位移。
f1, f2是粘滞阻尼系数,k1, k2是弹性系数。
求两系统的传递函数,并分析两系统变量间的相似关系。
图 1解:1)(1)(1111)()(212211221212211221212211112212+++++++=++++=S C R C R C R S C C R R S C R C R S C C R R S C R SC R S C R SC R s U s U 1)111(11)11(1)()(2122112212122112212132+++++++=S K f K f K f S K K f f S K f K f S K K f f S X S X两相似系统变量间对应关系:电压U---------------------------位移X电阻R---------------------------粘滞阻尼系数f 电容C---------------------------弹性系数的倒数K1二.(10分/150分)用方块图化简法,求图2所示系统的闭环传递函数图 2解:321341431131213213414311311)()(G G G G G G G G G G G G G G G G G G G G G G G G G G S R S Y +++--+++++--=∴2003年1.(10分/150分)求理想运算放大器的传递函数)()(s Ui s Uo ,结构图如下:解:理想运放∞→λZ ,流入运放电流0,0→→B U i)()()()()()()()()()(:)(0)()()()()()()()()()()()()()(414243324232142321s Z s Z s Z s Z s Z s Z s Z s Z s U s U s U U s Z s U s Z s U s U s Z s U s U s Z s U s U s Z s U s U i i i i i i O F B F F B O F F B B i ++==⎪⎪⎩⎪⎪⎨⎧--=--=-+=-=∴得消去即:2003年第1题示意图2.(10分/150分)求右图的传递函数)()()(s U s y s G =解:)()()(1)()()()()(1)(1)()()(1)()(21121221122*12s G s G s G s G s G s G s G s G s G s G s G s G s G s G +--=-+=+=∴2002年 1.(10分/100分)R-L-C 网络如图所示,信号源内阻为零,U r (t)为输入变量,U 0(t)为输入变量,试求电网络的状态变量表达式。
第一章绪论1.机械系统:以实现一定的机械运动、输出一定的机械能和承受一定的机械载荷为目的。
激励(输入):外界与系统的作用,如作用力(载荷)。
分为控制输入和扰动输入。
响应(输出):系统由于激励作用而产生的变形或位移。
2.机械工程控制论的研究对象和任务是什么?机械工程控制论实质上是研究机械工程中广义系统的动力学问题。
具体地说,是广义系统在一定的外界条件作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性所决定的整个动态历程,研究系统与其输入、输出三者之间的动态关系。
从系统、输入、输出三者之间的关系出发,根据已知条件与求解问题的不同,机械控制工程论的任务可以分为以下五个方面:(系统分析问题)已知系统和输入,求系统的输出。
(最优控制问题)已知系统和理想输出,设计输入。
(最优设计问题)已知输入和理想输出,设计系统(滤波与预测问题)已知输出,确定系统,以识别输入或输出中的有关信息。
(系统辨识问题)已知输入和输出,求系统的结构与参数。
3.控制系统的基本要求(稳、准、快)稳定性:动态过程的振荡倾向和系统能够恢复平衡状态的能力。
稳定性是系统工作的首要条件。
准确性:在调整过程结束后输出量与给定的输入量之间的偏差。
衡量系统工作性能的重要指标。
快速性:系统输出量与希望值之间产生偏差时,消除这种偏差的快速程度。
控制的三要素:控制对象、控制目标、控制手段。
控制论的两个核心:信息和反馈需要解决的两大基本问题:控制系统的分析和控制系统的设计。
4.反馈:将系统的输出以一定的方式返回到系统的输入端并共同作用于系统的过程。
内反馈:系统或过程中存在的各种自然形成的反馈。
内反馈是造成机械系统存在动态特性的根本原因。
外反馈:在自动控制系统中,为达到某种控制目的而人为加入的反馈。
正反馈:能使系统的绝对值增大的反馈。
负反馈:能使系统的绝对值减小的反馈。
5.自动控制的本质:闭环自动控制系统的工作过程就是一个“检测偏差并纠正偏差”的过程。
自动控制原理总复习资料(完美)总复第一章的概念典型的反馈控制系统基本组成框图如下:输出量串连补偿放大执行元被控对元件元件件象--反馈补偿元件测量元件自动控制系统有三种基本控制方式:反馈控制方式、开环控制方式和复合控制方式。
基本要求可以归结为稳定性(长期稳定性)、准确性(精度)和快速性(相对稳定性)。
第二章要求:1.掌握运用拉普拉斯变换解微分方程的方法。
2.牢固掌握传递函数的概念、定义和性质。
3.明确传递函数与微分方程之间的关系。
4.能熟练地进行结构图等效变换。
5.明确结构图与信号流图之间的关系。
6.熟练运用梅森公式求系统的传递函数。
例1:某一个控制系统动态结构图如下,求系统的传递函数。
C1(s)C2(s)C(s)C1(s)G1(s)G2(s)G3(s)R1(s)R2(s)R1(s)R2(s)传递函数为:C(s) = G1(s)C1(s) / [1 -G1(s)G2(s)G3(s)R1(s)R2(s)]例2:某一个控制系统动态结构图如下,求系统的传递函数。
C(s)C(s)E(s)E(s)R(s)N(s)R(s)N(s)C(s)G1(s)G2(s)-G2(s)传递函数为:C(s) = G1(s)C(s) / [1 + G1(s)G2(s)H(s)N(s)]例3:i1(t)R1 i2(t)R2R(s)+u1(t) c1(t)C1 C2 r(t)I1(s)+U1(s)112+I2(s)将上图汇总得到:R1I1(s)U1(s)C1s r(t)-u(t) = i(t) R U1(s)u(t) = [i(t) - i(t)]dt Cu(t) - c(t) = i(t)Rc(t) = i(t)dtCI2(s)R2KaC(s)1C2s(b)C(s) R(s)+R1C1sR2C2s1Ui(s)1/R11/C1sIC(s)1/R21/C2s10rad/s,试求系统的传递函数、特征方程、极点位置以及阻尼比和固有频率的物理意义。