A星算法求解旅行商问题(可打印修改)
- 格式:pdf
- 大小:121.30 KB
- 文档页数:11
一劳永逸的固定寻路平时我尽我所能,以避免可能被解释为一个在行业中的其他游戏或开发的批评说的事情。
但在这种情况下,我不得不做出一个异常的位。
我要谈谈我们与寻路面临的一些问题。
为了证明,这些问题仍然存在,我觉得有必要使这个视频... ...在幽默和轻松愉快的精神,它的目的是,希望在采取所有这些片段在上周录得最新,最最近修补的每场比赛的版本。
正如你可以看到,我们仍然是一个强大的寻路全线长的路要走... ...它甚至在一些万元的单位销售,AAA级质量职称的问题。
它不一定是一个普遍性的问题。
许多现代游戏有高品质的寻路,寻路经常在这里显示的一些游戏。
但仍有太多的游戏,寻路,游戏在20世纪90年代,以同样的方式。
(注:只是你看到大量的PC角色扮演游戏的唯一原因归结到便利,这些都是我当时安装的游戏,问题是不特定的任何类型或任何发挥想象力的平台。
有类似的问题,大量的游戏机游戏)。
据我所知,这些游戏大多使用寻路航点图。
我认为这几个寻路的问题,您在这个视频中看到,许多我们在整个行业面临的寻路问题的原因。
我相信航点图现在已经过时。
这篇文章解释了航点图方法的局限性,并勾画出了一个更好的方法五点的说法。
曾经有一段时间,这是有意义的,使用寻路航点。
早在20世纪80年代和90年代,我们的工作受到严重的技术限制,我们不得不削减了很多弯道。
但是我们现在一个多亿美元的产业。
我们的目标平台多内核和日益增加的大量的内存,我们可以做不起寻路正确。
有一个行业AI开发中说:“寻路是解决了。
”我们每一个寻路的问题,面临着现代游戏的好方法。
我们只是不经常使用它们。
我们没有理由不寻路,在每场比赛,每次。
打跳了详细的解释。
为什么航点对于寻路让我告诉你什么是一个典型的航点图看起来。
下面是一个在魔兽世界暴风城的小片:图1。
魔兽世界暴风城的一部分,下面是一个典型的航点图可能看起来在这方面想。
图2。
同一地区的一个航点图注释还有另一种方式做到这一点,它涉及使用凸多边形来描述AI角色可以旅行。

序:搜索区域假设有人想从A点移动到一墙之隔的B点,如下图,绿色的是起点A,红色是终点B,蓝色方块是中间的墙。
[图1]你首先注意到,搜索区域被我们划分成了方形网格。
像这样,简化搜索区域,是寻路的第一步。
这一方法把搜索区域简化成了一个二维数组。
数组的每一个元素是网格的一个方块,方块被标记为可通过的和不可通过的。
路径被描述为从A到B我们经过的方块的集合。
一旦路径被找到,我们的人就从一个方格的中心走向另一个,直到到达目的地。
这些中点被称为“节点”。
当你阅读其他的寻路资料时,你将经常会看到人们讨论节点。
为什么不把他们描述为方格呢?因为有可能你的路径被分割成其他不是方格的结构。
他们完全可以是矩形,六角形,或者其他任意形状。
节点能够被放置在形状的任意位置-可以在中心,或者沿着边界,或其他什么地方。
我们使用这种系统,无论如何,因为它是最简单的。
开始搜索正如我们处理上图网格的方法,一旦搜索区域被转化为容易处理的节点,下一步就是去引导一次找到最短路径的搜索。
在A*寻路算法中,我们通过从点A开始,检查相邻方格的方式,向外扩展直到找到目标。
我们做如下操作开始搜索:1,从点A开始,并且把它作为待处理点存入一个“开启列表”。
开启列表就像一张购物清单。
尽管现在列表里只有一个元素,但以后就会多起来。
你的路径可能会通过它包含的方格,也可能不会。
基本上,这是一个待检查方格的列表。
2,寻找起点周围所有可到达或者可通过的方格,跳过有墙,水,或其他无法通过地形的方格。
也把他们加入开启列表。
为所有这些方格保存点A作为“父方格”。
当我们想描述路径的时候,父方格的资料是十分重要的。
后面会解释它的具体用途。
3,从开启列表中删除点A,把它加入到一个“关闭列表”,列表中保存所有不需要再次检查的方格。
在这一点,你应该形成如图的结构。
在图中,暗绿色方格是你起始方格的中心。
它被用浅蓝色描边,以表示它被加入到关闭列表中了。
所有的相邻格现在都在开启列表中,它们被用浅绿色描边。
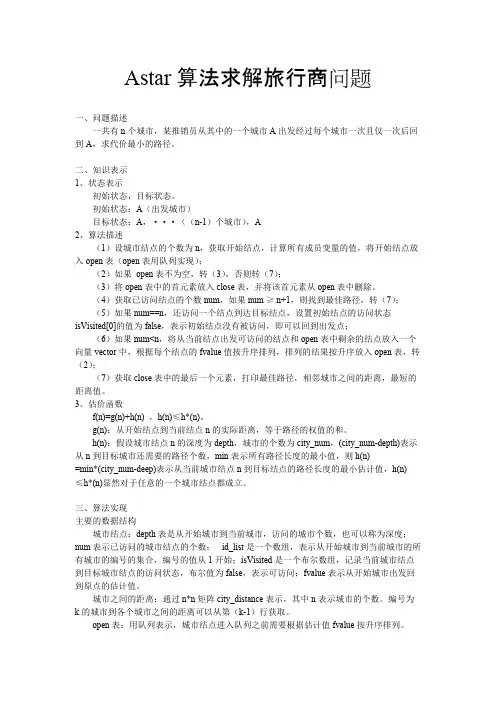
Astar算法求解旅行商问题一、问题描述一共有n个城市,某推销员从其中的一个城市A出发经过每个城市一次且仅一次后回到A,求代价最小的路径。
二、知识表示1、状态表示初始状态,目标状态。
初始状态:A(出发城市)目标状态:A,···((n-1)个城市),A2、算法描述(1)设城市结点的个数为n,获取开始结点,计算所有成员变量的值,将开始结点放入open表(open表用队列实现);(2)如果open表不为空,转(3),否则转(7);(3)将open表中的首元素放入close表,并将该首元素从open表中删除。
(4)获取已访问结点的个数num,如果num ≥n+1,则找到最佳路径,转(7);(5)如果num==n,还访问一个结点到达目标结点,设置初始结点的访问状态isVisited[0]的值为false,表示初始结点没有被访问,即可以回到出发点;(6)如果num<n,将从当前结点出发可访问的结点和open表中剩余的结点放入一个向量vector中,根据每个结点的fvalue值按升序排列,排列的结果按升序放入open表,转(2);(7)获取close表中的最后一个元素,打印最佳路径,相邻城市之间的距离,最短的距离值。
3、估价函数f(n)=g(n)+h(n) ,h(n)≤h*(n)。
g(n):从开始结点到当前结点n的实际距离,等于路径的权值的和。
h(n):假设城市结点n的深度为depth,城市的个数为city_num,(city_num-depth)表示从n到目标城市还需要的路径个数,min表示所有路径长度的最小值,则h(n)=min*(city_num-deep)表示从当前城市结点n到目标结点的路径长度的最小估计值,h(n)≤h*(n)显然对于任意的一个城市结点都成立。
三、算法实现主要的数据结构城市结点:depth表是从开始城市到当前城市,访问的城市个数,也可以称为深度;num 表示已访问的城市结点的个数;id_list是一个数组,表示从开始城市到当前城市的所有城市的编号的集合,编号的值从1开始;isVisited是一个布尔数组,记录当前城市结点到目标城市结点的访问状态,布尔值为false,表示可访问;fvalue表示从开始城市出发回到原点的估计值。
a星算法的例题含解答A* 算法是一种广泛用于图搜索和路径规划的算法。
它使用启发式评估函数来估计从起始节点到目标节点的代价,并在搜索过程中选择最优路径。
下面是一个简单的A* 算法的例子,以及对应的解答。
考虑一个简单的5x5 格子地图,其中S 表示起始点,G 表示目标点,# 表示障碍物,而数字表示每个方格的代价。
我们的目标是从起始点S 移动到目标点G,避开障碍物,并选择总代价最小的路径。
```地图:S 1 # 3 ## 2 # 4 ## # # G 5# # # 2 ## # # 1 #```在这个例子中,我们可以使用A* 算法找到从S 到G 的最优路径。
启发式函数可以使用曼哈顿距离,即从当前节点到目标节点的水平和垂直距离之和。
A* 算法的步骤:1. 初始化起始节点和目标节点,设置起始节点的代价为0。
2. 将起始节点加入开放列表(open list)。
3. 当开放列表不为空时,重复以下步骤:a. 从开放列表中选择代价最小的节点,作为当前节点。
b. 如果当前节点是目标节点,则找到了路径,结束搜索。
c. 将当前节点从开放列表中移除,并将其添加到封闭列表(closed list)。
d. 对当前节点的邻居节点进行遍历:-如果邻居节点不可通行或者在封闭列表中,忽略它。
-如果邻居节点不在开放列表中,将其添加到开放列表,并计算代价(代价= 当前节点的代价+ 从当前节点到邻居节点的代价)。
-如果邻居节点已经在开放列表中,并且新计算的代价更小,则更新邻居节点的代价。
在上面的例子中,我们可以通过A* 算法找到从S 到G 的最短路径。
具体步骤和代价计算需要在实际执行中进行,但希望这个简单的例子可以帮助理解A* 算法的基本思想。
求解旅行商问题的混合IDA星算法作者:王孝贵来源:《中国科技博览》2013年第19期摘要:旅行商问题是典型的NP完全问题,而且在实际生产生活中应用广泛。
求解旅行商问题的智能算法也有很多,但目前仍没有很好的算法求解组合优化问题。
本文提出一种混合IDA星算法,先使用混合粒子群优化算法在有限迭代内求出一个较优解,再通过此解构造IDA 星算法中的估值函数,求解旅行商问题。
通过实验分析,此方法达到了较好的效果,为解决旅行商问题提供了一种新思路。
关键词:旅行商问题;混合粒子群优化算法;IDA星算法旅行商问题(Traveling Salesman Problem,TSP)是一种典型的NP完全组合优化问题。
TSP问题可以描述为:一个旅行商人要拜访N个城市,每个城市只能拜访一次,最后要回到出发的城市,求出路程为所有路径之中的最小的路径。
TSP问题应用广泛,如焊接机器人焊点路径规划问题,水下清障机器人路径规划问题等都是TSP类问题。
TSP问题的主要求解方法有模拟退火算法、粒子群算法、启发式搜索法等。
这些算法各有优劣,目前仍没有一个算法具有很好的综合性能。
本文将用混合粒子群算法[2]求解结果构造IDA星算法中的估值函数来求解TSP问题。
1、粒子群算法粒子群优化(Particle Swarm Optimization,PSO)算法[1]的主要思想是先初始化为一群随机粒子,通过不断迭代找到最优解。
在每一次迭代中,粒子通过两个"极值"来更新自己。
一个极值是粒子本身当前所找到的最优解,叫做个体极值pBest。
另一个极值是群体目前找到的最优解,叫做群体极值gBest。
设D维粒子粒子i在t时刻的位置为Xi=(xi1,xi2,…,xiD),i=1,2,…,N,位置变化率为Vi=(vi1, vi2,…, viD),那么粒子i在t+1时刻的位置按如下公式进行更新:其中c1,c2取值为正常数;r1,r2为[0,1]之间的随机数;w称惯性因子。
问题描述:求解旅行商问题,给出如下城市表:A B C D EA 0 6 1 5 7B 6 0 6 4 3C 1 6 0 8 2D 5 4 8 0 5E 7 3 2 5 0请用A或者A Star算法找出一条旅行商由城市A出发,最后回到城市A的最短路线。
程序清单:travelling_salesman.h#include<iostream>using namespace std;const int maxVerticesNum=20;//城市数最大为20class graph//城市图类{public:graph();//构造函数void makeGraph(int st,int num);//初始化城市图,输入城市数,出发城市,存放权值的邻接矩阵int shortestPath(int start,int n);//求最短路径函数void pathOutput();//输出最短路径void copyPath(int a[],int b[]);//复制最短路径,暂存起来,求最短路径时要用到private:int verticsNum;//边数(存放城市数目)int startCity;//出发城市int vertics[maxVerticesNum];//该数组存放城市int edge[maxVerticesNum][maxVerticesNum];//存放权值的邻接矩阵int minpath[maxVerticesNum];//存放最短路径int termpath[maxVerticesNum];//用于暂时存放最短路径};graph::graph()//构造函数,初始化{for(int i=0;i<maxVerticesNum;i++){vertics[i]=i;minpath[i]=-1;termpath[i]=-1;for(int j=0;j<maxVerticesNum;j++)edge[i][j]=-1;}startCity=0;}void graph::makeGraph(int st,int num){verticsNum=num;startCity=st;cout<<"请输入城市间权值:"<<endl;for(int i=0;i<verticsNum;i++)for(int j=0;j<verticsNum;j++){if(i!=j){cout<<"城市"<<i+1<<"-->"<<"城市"<<j+1<<':';cin>>edge[i][j];}}}int graph:: shortestPath(int start,int n)//求最短路径函数{int min=0,m=0,path=0;//min用于记录最小路径值vertics[start]=-1;//把出发城市置为-1,表示把该城市从城市集中去掉if(n==0){vertics[start]=start;return edge[start][startCity];}else{int k=0;while(vertics[k]==-1) k++;min=edge[start][vertics[k]]+shortestPath(k,n-1);copyPath(minpath,termpath);//把到目前为止求得的最短路径暂存,以防在后面被覆盖path=k;for(k=0;k<verticsNum;k++){if(vertics[k]!=-1){copyPath(minpath,termpath);m=edge[start][vertics[k]]+shortestPath(k,n-1);//cout<<"n="<<n<<" "<<m<<endl;if(m<min)//如果m值比min还要小,则把m赋给min{min=m;path=k; //同时纪录路径}else//如果m值不比min小,则把暂存的最短路径复制copyPath(termpath,minpath);//到最短路径数组中,因为最短路径数组的内容已经被覆盖}}vertics[start]=start;//把出发城市从城市集中恢复,以防影响到后面的递归工作minpath[n]=path;//纪录最短路径return min;}}void graph:: pathOutput()//输出最短路径{cout<<"要求的最短路径为:";cout<<startCity+1<<"-->";for(int i=1;i<verticsNum;i++){cout<<minpath[verticsNum-i]+1<<"-->";}cout<<startCity+1<<endl;}void graph::copyPath(int a[],int b[]){for(int i=0;i<verticsNum;i++) b[i]=a[i];}travelling_salesman.c#include"travelling_salesman.h"#include<iostream>using namespace std;void main(){int cityNum,start_city;graph min_path;cout<<"请输入城市数目:";cin>>cityNum;cout<<"请输入出发的城市:";cin>>start_city;min_path.makeGraph(start_city-1,cityNum);int min=min_path.shortestPath(start_city-1,cityNum-1);min_path.pathOutput();cout<<"最小路径值为:"<<min<<endl;}运行结果:最短路径为:ACE DCA最小路径值为:15还有另一组解:ACE BDA最小路径值也为:15。
A*算法&SA算法A*算法&SA算法 (1)A*算法 (1)【算法简介】 (1)【算法流程】 (1)【问题描述】 (1)【核心代码】 (2)【实验结果】 (2)【实验思考】 (6)SA算法 (7)【算法简介】 (7)【算法流程】 (7)【问题描述】 (7)【核心代码】 (7)【实验结果】 (8)【实验思考】 (9)附录 (10)【A*算法解决八数码问题代码】 (10)【SA算法解决旅行商问题代码】 (23)A*算法【算法简介】A*搜索算法是对A搜索算法的改进,从而不仅能得到目标解,而且还一定能找到最优解。
当然是问题有节的前提下。
定义最优估价函数f*(n)=g*(n)+h*(n)。
其中n为状态空间图中的一个状态,g*(n)为起点到n状态的最短路径代价值,h*(n)为n状态到目的状态的最短路径的代价值。
这样f*(n)就是从起点出发通过n状态而到达目的状态的最佳路径的总代价。
A*搜索中用个个个g(n)和h(n)作为g*(n)和h*(n)的估计,使其尽量接近,从而提高效率。
【算法流程】•初始化open、closed链表•判断此问题是否有解:无解,则打印信息退出;有解,则继续•Repeatopen表为空→查找失败open表不空,从open表中拿出f min(记为Bestnode)放入closed表若Bestnode是目标结点→成功求解break若Bestnode不是目标结点,产生它的后继→succeed链表对每个后继,Repeat建立此结点到Bestnode的parent指针结点在open表中,将open表中结点加入Bestnode后继结点链,若此结点g值小于open表中结点g值,open表中结点改变parent指针,并删除此点结点在closed表中,将closed表中结点加入Bestnode后继结点链,若此结点g值小于closed表中结点g值,closed表中结点改变parent指针,closed表中结点重新加入open表中,并删除此点open表和closed表中均无此点,将此点加入Bestnode后继结点链,并按一定规则的加入到open表中【问题描述】在一个3*3的方棋盘上放着1,2,3,4,5,6,7,8八个数码,每个数码各占一格,且有一个空格。
算法报告旅行商问题模板《算法设计与课程设计》题目: TSP问题多种算法策略班级:计算机技术14学号:姓名:指导老师:完成日期:成绩:旅行商问题的求解方法摘要旅行商问题(TSP 问题)时是指旅行家要旅行n 个城市然后回到出发城市,要求各个城市经历且仅经历一次,并要求所走的路程最短。
该问题又称为货郎担问题、邮递员问题、售货员问题,是图问题中最广为人知的问题。
本文主要介绍用动态规划法、贪心法、回溯法和深度优先搜索策略求解TSP 问题,其中重点讨论动态规划法和贪心法,并给出相应求解程序。
关键字:旅行商问题;动态规划法;贪心法;回溯法;深度优先搜索策略 1引言旅行商问题(TSP)是组合优化问题中典型的NP-完全问题,是许多领域内复杂工程优化问题的抽象形式。
研究TSP 的求解方法对解决复杂工程优化问题具有重要的参考价值。
关于TSP 的完全有效的算法目前尚未找到,这促使人们长期以来不断地探索并积累了大量的算法。
归纳起来,目前主要算法可分成传统优化算法和现代优化算法。
在传统优化算法中又可分为:最优解算法和近似方法。
最优解算法虽然可以得到精确解,但计算时间无法忍受,因此就产生了各种近似方法,这些近似算法虽然可以较快地求得接近最优解的可行解,但其接近最优解的程度不能令人满意。
但限于所学知识和时间限制,本文重点只讨论传统优化算法中的动态规划法、贪心法、回溯法和深度优先搜索策略。
2正文2.1动态规划法2.1.1动态规划法的设计思想动态规划法将待求解问题分解成若干个相互重叠的子问题,每个子问题对应决策过程的一个阶段,一般来说,子问题的重叠关系表现在对给定问题求解的递推关系(也就是动态规划函数)中,将子问题的解求解一次并填入表中,当需要再次求解此子问题时,可以通过查表获得该子问题的解而不用再次求解,从而避免了大量重复计算。
2.1.2 TSP 问题的动态规划函数假设从顶点i 出发,令'(,)d i V 表示从顶点i 出发经过'V 中各个顶点一次且仅一次,最后回到出发点i 的最短路径长度,开始时,{}'V V i =-,于是,TSP 问题的动态规划函数为:{}{}{}''(,)min (,)()(,)()ik ki d i V c d k V k k V d k c k i =+-∈=≠2.1.3算法分析(1)for (i=1; i<="">d[i][0]=c[i][0];(2)for (j=1; j< n-12 -1; j++)for (i=1; i<="">if (子集V[j]中不包含i)对V[j]中的每个元素k ,计算V[m] == V[j]-k;d[i][j]=min(c[i][k]+d[k][m]);(3)对V[n-12 -1]中的每一个元素k ,计算V[m] == V[n-12-1]-k; d[0][ n-12 -1]=min(c[0][k]+d[k][m]);(4)输出最短路径长度d[0][ n-12 -1];2.1.4时间复杂性T()(2)n n O n =?动态规划法求解TSP 问题,把原来的时间复杂性是O(n!)的排列问题,转化为组合问题,从而降低了算法的时间复杂性,但它仍需要指数时间。
1.问题基本描述:求一个旅行商经过N个城市最后回到出发点的最短路径.即,在一个无向带权图的邻接矩阵中,求一个最短环包括所有顶点.2.解法:1)动态规划:假设从顶点i出发,令d(i,V’)表示从顶点i出发经过V’中各个顶点一次且仅一次,最后回到出发点i的最短路径的长度,开始时,V’=V-{i},于是,旅行商问题的动态规划函数为:d(i,V’) = min{c ik + d(k,V’-{k})} (k∈V’) 1)d(k,{}) = c ki (k ≠ i)2)简单来说,就是用递归表达:从出发点0到1号点,假设1是第一个,则剩下的路程就是从1经过剩下的点最后回到0点的最短路径. 所以当V’为空的时候, d(k,{}) = c ki (k ≠ i), 找的是最后一个点到0点的距离.递归求解1之后,再继续求V’之中剩下的点,最后找出min.如果按照这个思想直接做,对于每一个i都要递归剩下的V中所有的点,所以这样的时间复杂度就近似于N!,其中有很多重复的工作.可以从小的集合到大的集合算,并存入一个二维数组,这样当加入一个节点时,就可以用到之前的结果,如四个点的情况:动态填表:表中元素代表第i个节点经过V集合中的点最后到0点的最短值.如果有多个值,取其中最小的一个.这样一共循环(2^(N-1)-1)*(N-1)次,就把时间复杂度缩小到O(N*2)的级别.核心伪代码如下:{for (i =1;i<n;i++) //初始化第0列d[i][0]=c[i][0];for( j=1;j<2^(N-1)-1;j++)for(i=1 ; i<n ;i++){if(子集Vj中不包含i){对Vj中的每个元素k,计算d[i][Vj] = min{c[i][k] + d[k][{Vj-k}] | 每一个k∈Vj};}}对V[2^(n-1)-1]中的每个元素k,计算:d[0][2^(n-1)-1] = min{c[0][k] + d[k][2^(n-1)-2]};输出最短路径:d[0][2^(n-1)-1];}。
A*算法实验报告实验目的1.熟悉和掌握启发式搜索的定义、估价函数和算法过程2. 学会利用A*算法求解N数码难题3. 理解求解流程和搜索顺序实验原理A*算法是一种有序搜索算法,其特点在于对估价函数的定义上。
对于一般的有序搜索,总是选择f值最小的节点作为扩展节点。
因此,f是根据需要找到一条最小代价路径的观点来估算节点的,所以,可考虑每个节点n的估价函数值为两个分量:从起始节点到节点n的代价以及从节点n到达目标节点的代价。
实验条件1.Window NT/xp/7及以上的操作系统2.内存在512M以上3.CPU在奔腾II以上实验内容1.分别以8数码和15数码为例实际求解A*算法2.画出A*算法求解框图3.分析估价函数对搜索算法的影响4.分析A*算法的特点实验分析1. A*算法基本步骤1)生成一个只包含开始节点n0的搜索图G,把n放在一个叫OPEN的列表上。
2)生成一个列表CLOSED,它的初始值为空。
3)如果OPEN表为空,则失败退出。
4)选择OPEN上的第一个节点,把它从OPEN中移入CLPSED,称该节点为n。
5)如果n是目标节点,顺着G中,从n到n的指针找到一条路径,获得解决方案,成功退出(该指针定义了一个搜索树,在第7步建立)。
6)扩展节点n,生成其后继结点集M,在G中,n的祖先不能在M中。
在G中安置M的成员,使他们成为n的后继。
7)从M的每一个不在G中的成员建立一个指向n的指针(例如,既不在OPEN中,的这些成员加到OPEN中。
对M的每一个已在OPEN中或也不在CLOSED中)。
把M1CLOSED中的成员m,如果到目前为止找到的到达m的最好路径通过n,就把它的指针指向n。
对已在CLOSED中的M的每一个成员,重定向它在G中的每一个后继,以使它们顺着到目前为止发现的最好路径指向它们的祖先。
8)按递增f*值,重排OPEN(相同最小f*值可根据搜索树中的最深节点来解决)。
9)返回第3步。
在第7步中,如果搜索过程发现一条路径到达一个节点的代价比现存的路径代价低,就要重定向指向该节点的指针。