阿芙拉型油轮甲板设备操作简图
- 格式:xls
- 大小:319.00 KB
- 文档页数:1
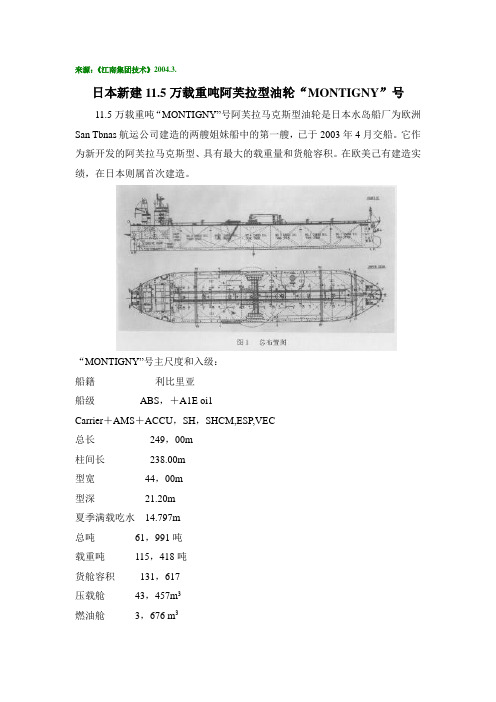
来源:《江南集团技术》2004.3.日本新建11.5万载重吨阿芙拉型油轮“MONTIGNY”号11.5万载重吨“MONTIGNY”号阿芙拉马克斯型油轮是日本水岛船厂为欧洲San Tbnas航运公司建造的两艘姐妹船中的第一艘,已于2003年4月交船。
它作为新开发的阿芙拉马克斯型、具有最大的载重量和货舱容积。
在欧美己有建造实绩,在日本则属首次建造。
“MONTIGNY”号主尺度和入级:船籍利比里亚船级ABS,+A1E oi1Carrier+AMS+ACCU,SH,SHCM,ESP,VEC总长249,00m柱间长238.00m型宽44,00m型深21.20m夏季满载吃水14.797m总吨61,991吨载重吨115,418吨货舱容积131,617压载舱43,457m3燃油舱3,676 m3淡水舱185m3航速14.7 节(设计满载吃水、CSO 15%海上功率余度)续航力21,000海里船员28人1基本设计该型船基本设计的特征如下:(1)由于把常规的阿芙拉马克斯型油轮的船宽从42m放宽到44m,所以确保了等同于标准型10.5万吨型的浅吃水。
(2)如总布置图1所示,船体中央货舱区有6对货舱和1对污水舱、船尾有机舱和居住区,为无首楼平甲板型船。
考虑到装卸中的稳定性,货舱有中心舱壁、呈纵向一分为两。
(见图1)(3)船尾装有日本水岛公司自己开发的节能型串联舵叶(STF-Sanoyas Tlandem Fin专利申请中)。
(见图2)它通过在螺旋桨前方的船尾外板上设1对(串联)的翼片,以控制流入螺旋桨的水流,使推进性能提高。
同时,还采用具有新颖翼截面的高效螺旋桨和高升力舵。
2 船体结构本船船体结构的主要特征如下:(1)货舱的船舷和船底侧外部都有压载舱防护,形成满足SOLAS国际规范的双完结构。
双壳部的深度不但满足规范要求,还要尽可能满足货舱容积以达到两者最佳化。
(2)常规船用钢使用的比例达船体结构总体的50%以上,以大幅度降低高强度钢的使用率,以增加抗腐蚀余量、提高可靠性。
特种船首甲板绞缆机操作规程The Operation Procedures Of Warping Winch On The Bow Deck 1.启动操作Starting Operation1.1.预先通知机舱确认是否有足够的电力供应(必要时加开辅机)。
Advance notice the engine room to confirm whether there is sufficient electricity supply (if necessary, additional auxiliary).1.2.检查油柜油位。
Check the oil level of the oil tank.1.3.根据液压泵浦间液压油泵开关标识正确启动需要的缆车油泵。
According to the switch label of hydraulic pump which is in the hydraulic pumping room, start the needed winch oil pump correctly.1.4.使用首甲板控制箱内的控制手柄操纵缆车。
Use the handle in the bow deck control box to manipulate the winch.1.5.使用离合器带上或脱开缆车。
Use the clutch to connect or disconnect the winch.1.6.缆车使用完毕后刹住,脱开离合。
After using the winch, brake it and disconnect the clutch.1.7.通常绞缆机油泵启动运转几分钟再用。
Usually use the winch oil pump after it has run a few minutes1.8.长时间使用绞缆机需启动绞缆机冷却水泵。
Long-time using winch should also start winch cooling water pump.2.关闭操作Closing Operation2.1.缆机使用完毕后,务必将缆绳刹牢,离合脱开。


船舶操纵系统图解船舶操纵系统第一节操纵系统概述为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。
近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。
大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和远程控制。
随着自动化技术和电子技术的发展,各种遥控技术已广泛地应用于柴油机的操纵机构。
特别是近年来电子计算机技术和微处理机已用于主机遥控、巡回检测和工况监视等方面,不仅大大减轻了轮机人员的劳动强度,改善了工作条件,还可以避免人为的操作差错,提高船舶运行的安全性、操纵性和经济性。
目前,主机遥控技术水平越来越高,船舶正朝着全面自动化和智能化的方向发展。
一、对操纵系统的要求在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。
为了保证操纵系统能够可靠地工作,对船舶柴油机的操纵系统有下列基本要求:(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相应的要求。
(2)具有必要的连锁装置,以避免操作差错而造成事故。
起动连锁装置:盘车机未脱开不能起动,换向未到位不能起动。
换向连锁装置:转向与要求不符时不能起动,不允许在较高转速下换向,运转过程中不能自行换向。
滑油保安连锁装置:当滑油压力下降至许用下限值时,将油量调节杆推至零油位,使柴油机自行熄火停车。
(3)必须设有必要的监视仪表和安全保护、报警装置。
在操纵台(或遥控操纵台)上有转速、转向、气压、油压、水温等醒目的仪表,并对直接影响安全运行的有关压力和温度等置有报警装置和安全保护装置。
(4)操纵机构中的零部件必须灵活、可靠、不易损坏。
甲板实习生培训资料参考1.船舶种类:1.1按用途分类杂货船general cargo carrier滚装货物/车辆运输船RO-RO cargo/vehicles carrier散货船bulk carrier油船oil tanker–原油油船crude oil tanker成品油船product tanker大型原油油船VLCC化学品船chemical tanker液化气船liquefied gas carrier集装箱船container vessel渔船fishing vessel拖捞船trawler特殊用途船special purpose vessel-布缆船cable layer挖泥船dredger浮船坞floating dock储油驳oil storage barge淡水驳fresh water barge拖曳船tug boat游艇yacht客船,渡船passenger ship,ferry海上移动平台mobile offshore unit石油钻井平台oil drilling rig军舰warship,naval vessel,war craft巡洋舰cruiser护航驱逐舰escort destroyer潜水艇submarine1.1.2按大小分类巴拿马型Panama max:DWT60,000-75,000t阿芙拉型AFRA max:DWT80,000-110,000t苏伊士型Suez max:DWT140,000-150,000t大型油船VLCC(very large crude carrier):more than200,000t超大型油船ULCC(ultra large crude carrier):more than300,000t2.船体部件名称:龙骨Keel外板Shell plating舭龙骨bilge keel肋骨frame纵向肋骨longitudinal frame横向肋骨transverse frame单底构造single bottom construction双层底构造double bottom construction3.船体舾装和甲板机械3.1舵rudder单板非平衡舵single plate unbalanced rudder挂在挂舵臂上的半平衡舵semi balanced on horn(mariner type rudder)普通舵simples rudder反应舵contra rudder3.2舱盖hatch cover液货船油密舱盖oil tight hatch cover(tank dome)机舱天窗(供机舱的通风,采光,物料进出用)engine room sky light3.3锚anchor有干锚(海军锚)stock anchor无干锚(霍尔锚)stockless anchor大抓力锚high holding power anchor3.4锚链anchor chain3.5测深管sounding pipe3.6系泊装置mooring and anchoring fittings3.7梯ladder3.8锚机windlass起锚速度hoisting speed:不管锚机的类型,工作负荷及锚链的类型等等,锚机设计时的标准起升速度为0.15m/s。
极地破冰型阿芙拉油船的线型设计丁悦;郭世玺【摘要】为开发PC6冰级的阿芙拉油船线型,总结归纳极地水域航行船舶规则中对PC型极地航行破冰船舶的要求,探究破冰线型的基本特点.在常规Aframax油船线型的基础上,设计两型不同形式的满足PC6要求的线型,按照规范计算包括原线型在内的三型线型的有效冰载荷,计算各线型在开敞水域设计航速下的快速性,对比计算结果,综合分析,确定满足要求的PC冰级Aframax油船线型.【期刊名称】《船海工程》【年(卷),期】2019(048)002【总页数】5页(P122-126)【关键词】破冰型阿芙拉油轮;线型设计;CFD计算【作者】丁悦;郭世玺【作者单位】上海外高桥造船有限公司,上海200137;上海外高桥造船有限公司,上海200137【正文语种】中文【中图分类】U662目前,全球航运重心正逐步转向北极航道。
与传统环球海上航行航线相比,北极航道畅通后将使这些地区的国际贸易航线航程缩短6 000~8 000 km,可节省40%的航运成本,且能避开索马里海盗威胁[1]。
因此,新型极地冰区船舶市场前景良好。
IMO制定的POLAR CODE极地规则2017年1月1日起强制生效,凡是拟进入极地水域营运的船舶均需要满足POALR CODE的要求,应根据该要求开发满足极地规则的冰级为PC6的极地阿芙拉油船。
1 冰级要求及特点1.1 IACS PC冰级划分IACS Polar Class中对冰况的相关描述见表1,其中,PC6指能够在夏/秋季布满中等厚度当年冰龄的极地海域中独自运营的钢制船舶[2]。
1.2 IACS PC船舶冰级特点除法国船级社(BV)有特殊要求外,包括DNV在内的其他船级社对于Polar Class 6冰级要求的船舶,认可使用常规船艏或球鼻艏来进行破冰活动。
此冰级要求下的冰层较薄,破冰采用“连续式”破冰法,即主要靠螺旋桨的力量和船头(船尾)将冰层劈开撞碎。
因此,认为可以使用常规阿芙拉型油船船艏作为此PC 6级冰区航行油船的线型[3-5]。