全国空间轨道设计竞赛甲组题目
- 格式:pdf
- 大小:628.94 KB
- 文档页数:8

共4页,第1页班级:_______________ 姓名:_______________ 学号:_______________密------------------------封-----------------------线------------------------外------------------------不------------------------准------------------答-----------------题《城市轨道交通线路与站场设计》期末试卷202 - 202 学年第 学期(A 卷,闭卷) 时间: 100分钟分)1. 是城市总体规划中的专项规划,在城市规划流程中,位于综合交通规划之后,专项详细控制性规划之前。
2. 确定线网规模的三项指标为、 和 、以及 。
3. 城市轨道交通线路敷设方式主要有 、 和4.轨道交通线路设计内容主要设计三方面: 、 和5.《地铁设计规范》规定区间隧道的线路最小坡度宜采用 ,困难条件下可采用6.路基的填挖断面面积,是指横断面图中原地面线与路基设计线所包围的面共4页,第3页共4页,第4页A.1.2~1.8 mB.1.1~1.8 mC.1.2~1.7 mD.1.2~1.9 m三、简答题(本大题共5小题,每小题6分,共30分)1、说明地面线敷设方式的优缺点?(6分)2、节能型纵断面设计如何做到节能效果?(6分)3、 坡面防护可选用铁路路基常用的一般防护措施。
常见的防护措施包括以下几种。
(6分)4、简要说说盖挖法的优缺点(6分)5、BIM 主要可以应用于城市轨道交通线路及站场的什么阶段?(6分)、论述题(本大题共1小题,共20分)1、轨道交通设计师轨道交通建设的基础,是一个综合性的工作,其具有牵涉面广,复杂性强,劳动强强度大,责任重大等特点。
因此,城市轨道交通设计的好坏直接影响到将来整条轨道的交通线路。
学完本课程城市轨道交通线路与战场设计,请从交通综合选线,平面设计,纵断面设计,横断面设计以及车站设计等几个方面谈谈你对线路与站场设计的见解。

第六届全国空间轨道设计竞赛冠军团队解法朱阅訸;罗亚中;贺波勇【摘要】第六届全国空间轨道设计竞赛题目乙是一个利用行星引力辅助最快飞出太阳系的轨迹优化问题,本文介绍了国防科学技术大学团队的求解方法.该方法先基于构建的推力方向固定的小推力引力辅助优化模型得到最优的引力辅助行星序列,再通过对优化模型的改进和推力方向的优化得到更进一步的解.求解结果表明该方法可以有效地优化出一条最快逃逸的轨道.【期刊名称】《力学与实践》【年(卷),期】2015(037)004【总页数】6页(P557-562)【关键词】轨道设计;竞赛;引力辅助;小推力;最快逃逸【作者】朱阅訸;罗亚中;贺波勇【作者单位】国防科技大学航天科学与工程学院,长沙410073;国防科技大学航天科学与工程学院,长沙410073;国防科技大学航天科学与工程学院,长沙410073【正文语种】中文【中图分类】V412.4全国空间轨道设计竞赛原名全国深空轨道设计竞赛,首届竞赛于2009年由中国力学学会和清华大学航天航空学院发起并组办[1].该竞赛主要是面向航天动力学领域的学者和爱好者,问题求解涉及多目标多任务的探测序列确定、全局优化方法、小推力局部优化方法等技术难题[2].与国际轨迹优化竞赛(Global TrajectoryOptim ization Com petition)类似,每一届比赛由上届比赛的冠军团队出题[3].按照惯例,本届竞赛由中国力学学会和上届冠军西安卫星测控中心宇航动力学国家重点实验室组办[4].与往届比赛不同的是,本届比赛有甲乙两道可选题目,题目甲是一个同时考虑日地月引力的多体动力学轨迹优化问题,题目乙是一个利用行星引力辅助最快逃逸太阳系的轨迹优化问题.作者代表国防科学技术大学航天科学与工程学院参加了本届空间轨道设计竞赛并获得了题目乙组的冠军.本文主要将国防科学技术大学团队求解题目乙的步骤以及解题过程方法作一个简要的介绍. 探测器于2025年1月1日至2055年12月31日之间任意时刻从地球出发逃逸太阳系,出发时刻认为探测器的日心位置在误差范围内与地球相同.运载火箭最大可为探测器提供大小为3 km/s的逃逸速度,方向任意选择.逃逸过程中可在任意时刻利用大行星的引力辅助效应,即飞越的瞬时获得大行星引力辅助所产生的速度增量.探测器的飞行轨道只受太阳引力影响,不考虑大行星及小天体引力(行星引力辅助除外).设计一条最快飞离太阳系的轨道.起始时刻为地球轨道出发时刻,终端时刻为飞到距离日心40 AU处的时刻,要求飞出后的轨道偏心率不小于1.探测器最大载重2500 kg,其中燃料罐质量为燃料质量的5%,设备自重500kg,燃料质量可根据情况自由调整.推进系统只能采用下面两种方式中的一种:(1)电推进,比冲3000 s,推力最大值0.5N;(2)化学推进,比冲500s.2.1 推进方式选择采用化学推进时,加速过程近似为瞬时速度脉冲,燃料质量与速度增量的转换满足下式式中,m 0和m f分别为施加脉冲前后的质量,ΔV为脉冲的大小,I sp为推进比冲,g e为地球海平面的重力加速度.由于化学推进可以忽略脉冲作用时间,因此燃料质量越多所能提供的速度增量就越大,根据题中所给条件取最大载重质量2500 kg,代入式(1)中可求得化学推进方式的速度增量约为7.89km/s.采用电推进时,加速过程需要长时间的小推力作用,在作初步估计时也可采用脉冲方式计算,但由于推进过程中有引力损耗,需要乘一个转化因子K,K一般取经验值0.5~0.8.探测器初始质量还是取2500kg,可求得电推进方式的速度增量为23.67~37.87km/s.由于行星际飞行的时间很长,飞行器有足够的时间通过小推力方式获得更大的速度增量,因此考虑用小推力方式进行轨道设计.2.2 无引力辅助的轨道首先考虑不用引力辅助直接飞出去的情况,题目乙所评价的性能指标为最短飞离太阳系的时间,为了使探测器在更短的时间内增加到更大的速度,应该尽早地用掉所携带的燃料.另外,沿直线运动的物体若给定加速度大小和作用时间,要达到最好的加速效果应该沿着其速度方向加速.这里不妨先假设沿曲线运动的物体也有类似的特性.为了减少设计变量个数,根据上述直观判断和经验先设定一些值:(1)推力大小设为最大值0.5N;(2)积分步长取1天,积分过程中推力方向始终沿着速度方向;(3)探测器从地球轨道出发的逃逸速度大小取最大值3km/s,该情况下,整段轨道分为全力推进段和双曲线滑行段两个部分.其中这里的全力推进段定义为用最大推力一直沿着飞行器速度方向推进的轨道段,其动力学模型表示如下式中,r和v为航天器的位置和速度矢量,µ为太阳的引力常数,F max为最大推力,m为航天器当前时刻的质量.优化的设计变量只有4个,分别是出发时刻T0,决定逃逸速度方向角度的u和v,以及初始燃料质量m 0,指标函数为式中,Δt1为全力推进段飞行时间,Δt2为双曲线滑行段飞行时间.该情况下优化的结果约为6.726年,其黄道平面内的轨迹如图1所示.将该值作为基准,若使用行星的引力辅助效应,时间应该不大于6.726年.3.1 M GA-1DSM优化模型Izzo等提出了MGA(mu ltip le gravity assist)以及MGA-1DSM(multip le gravity assist using deep spacemaneuvers)两种不同的引力辅助优化模型[5]. MGA是单纯依靠行星引力辅助飞行的模型,MGA-1DSM则是在引力辅助天体之间还有一次脉冲机动.其中MGA-1DSM使用得更为广泛,虽然该模型设计变量较多,但不需要像MGA模型一样判断引力辅助条件是否满足,MGA-1DSM 模型简单描述如下:把每两次引力辅助之间的轨道记为一段,在一段轨道中,DSM之前的轨道采用Kep ler算法求解,DSM之后的轨道采用Lambert算法求解,若总共用了N-2次行星引力辅助,则MGA-1DSM模型的设计变量为变量个数为4N-2,N为包括地球在内的整个飞行过程中借力或是交会的大行星个数.式(4)中T0为出发时刻;V∞是出发时刻的双曲线剩余速度大小;Ti是和每个天体交会的时刻;ηi是0到1之间的一个系数;ηi(Ti-Ti-1)为Kep ler段飞行时间,(1-ηi)(Ti-Ti-1)为Lambert段飞行时间;r pi是用于计算引力辅助的近拱距;i bi是航天器相对引力辅助天体的倾角.MGA-1DSM模型的飞行过程如图2所示.3.2 M GA-LT-1DSM优化模型3.1 中给出的MGA-1DSM是基于脉冲方式推进的优化模型,为了使模型适用于小推力轨道,需要对原来的模型进行改进.首先把MGA-1DSM模型前一部分Kepler段用2.2中提到的全力推进段替换,后一部分Lambert段不变,保留Lambert段的目的是为了最后能交会上下一颗需要引力辅助的行星.另外,MGA-1DSM模型是以最后交会行星为终端条件的,而对于该问题来说终端条件要改为距离日心40 AU处.这里将改进后的优化模型称为MGA-LT-1DSM(multip le gravity assist using low thrust and deep spacemaneuvers),若总共用了N-1次行星引力辅助,则其设计变量为变量个数为4N+1,相比原来的MGA-1DSM模型,由于最后一颗行星由交会对象变成了引力辅助对象,设计变量中将增加最后一颗引力辅助行星的近拱距r pN 和相对倾角i bN以及探测器的初始质量m 0.MGA-LT-1DSM模型的飞行过程如图3所示.基于上述改进的模型,将指标函数设计成如下形式式中,ΔTi为两颗大行星之间的飞行时间,Δvi为Lambert段的初始速度脉冲,Δt1是从最后一颗引力辅助行星出来后的推进段飞行时间,Δt2是双曲线滑行段的飞行时间.该指标函数的设计目的是在优化总飞行时间的基础上,让各次中途施加的Lambert脉冲Δvi趋于0,从而实现脉冲轨道向小推力轨道的转化.如果优化的结果Lambert段时间也趋于0,也即系数ηi趋于1,那两颗行星之间的轨道段几乎都为全力推进段;如果优化的结果Lambert段时间不趋于0,那么两颗行星之间的轨道段还是分为两部分,前一部分为全力推进段,后一部分可近似看成Kep ler 滑行段.引力辅助轨道的设计大都是以节省探测器燃料为主要目的[6],但本题目中所要设计和优化的引力辅助轨道主要是为了节省飞行时间,因此相对于燃料最优的引力辅助轨道,时间最优的轨道具有以下几个不同点:(1)探测器应该始终沿着日心距逐渐增大的方向飞行,即不会用处于地球轨道内的水星和金星进行引力辅助,因为用这两颗行星进行引力辅助虽然可以获得更大的速度,但要经历一个日心距先减小后增大的过程,这个过程的时间要近1个地球轨道周期,这对于时间最优的轨道来说是不划算的;(2)不宜使用同一颗行星进行多次引力辅助,也不宜用地球进行引力辅助.原因与第一点类似,因为用同一颗地球轨道外的行星多次引力辅助至少需要多加2个地球轨道周期的时间;(3)要尽可能地将更靠近地球的火星、木星和土星作为引力辅助对象,因为探测器越早获得引力加速,就能越快摆脱日心引力束缚.根据以上分析,可能的引力辅助序列将大大减少,为了方便,把可能用到的行星按轨道顺序依次标号,地球为3,火星为4,木星为5,土星为6,天王星为7,海王星为8.各行星轨道的周期和主要的几个大行星之间的会合周期如表1和表2所示.题目所给的地球出发时间为2025–2055年,该时间区间间隔太长,直接在整个区间内搜索非常困难,为此需要根据表1的行星周期和表2的行星会合周期将时间分段来进行搜索,区间间隔一般取略大于会合周期.若只用一颗行星进行引力辅助时,根据表2的信息,只有地球和火星的会合周期超过2年,地球与木星包括木星以外其他行星的会合周期都是略大于1年,因此可以将地--火的搜索区间设为800天,其他的搜索区间设为400天;用两颗包括两颗以上行星引力辅助时则需要先确定第一颗行星的时间窗口,再根据第一颗行星的窗口以及和后面行星的会合周期去继续搜索后面的行星是否还有匹配的窗口.根据上述原则,对3-4-∞,3-5-∞,3-6-∞,3-7-∞,3-8-∞,3-4-5-∞,3-4-6-∞,3-4-7-∞,3-4-8-∞,3-5-6-∞,3-5-7-∞,3-4-5-8-∞,3-4-6-7-∞等引力辅助序列分别进行了优化.其中3表示从地球出发,后面的数字表示对应的借力行星,∞表示飞到40 AU处,表3给出了上述引力辅助序列基于MGA-LT-1DSM模型优化得到的结果.从表3中可以看出3-4-5-∞序列得到的结果最优,为5.678年.其飞行轨迹如图4所示.超过4颗星的序列通过查看最后一颗星和之前序列的相位关系没有发现比较合适的出发窗口.除了几个用到天王星和海王星进行引力辅助的序列因为在到达这两个行星之前燃料已经用完外,上述多数引力辅助序列的优化结果均具有以下几个特点:(1)初始逃逸速度逼近3 km/s;(2)Lambert段初始脉冲Δvi趋于0;(3)ηi趋于1,也即Lambert段时间趋于0.这些特点说明了当两颗行星之间的轨道段全部为全力推进段时总时间更优.但是求解时发现用MGA-LT-1DSM模型进行优化无法获得完整的小推力轨道,Lambert 段的存在加上指标函数的特性使得优化得到的解总是存在一个很小的速度脉冲和一段很小的Lambert转移时间.若将速度脉冲忽略不计而直接用Kep ler算法预报Lambert段,则轨道终端点与行星的距离又无法满足引力辅助位置误差的要求.为此需要对引力辅助优化模型作进一步地改进.为了得到无脉冲的轨道,只能将Lambert段从原来的模型中去掉,这里将去掉Lambert段后的模型称为MGA-LT.若总共用了N-1次行星引力辅助,则其设计变量为变量个数为3N+2,相比MGA-LT-1DSM模型,由于没有了Lambert段,设计变量中减少了每两颗行星之间的时间系数ηi.分析原来的模型可以看出,Lambert段主要是起到一个瞄准下一颗要引力辅助行星的作用,确保探测器最后能与行星交会上.而改进后的MGALT模型本身是无法瞄准下一颗要引力辅助的行星的.因此,需要对指标函数进行重新设计,新的指标函数设计如下式中,di为推了ΔTi时间后探测器和引力辅助行星之间的距离;a为一个调整数量级的系数.该指标函数的设计思路是通过判断di是否小于10km来确定是否能用该颗行星进行引力辅助.题中给的位置允许误差为100 km,这里提高一个数量级是为了防止积分过程造成的误差影响最终的结果.该指标函数的设计目的是通过优化过程来不断减小di使之达到引力辅助条件,对距离di取对数是为了让优化过程更加平缓,因为实际求解时发现直接优化比取对数后优化更容易陷入局部最优.可以看出,该模型的特点主要是用指标函数的引导作用代替原模型中Lambert段的瞄准作用,使探测器最后能用上下一颗行星的引力辅助.其引导过程如图5所示. 虽然该指标函数结合MGA-LT模型可以得到完全由小推力推出来的轨道,但用指标函数代替模型引导对于优化来说难度增加了不少.因为指标函数引导实质上是一个基于优化算法引导的随机打靶过程,它不像Lambert算法一样最后肯定能打中目标.因此用该模型优化时需要以MGA-LT-1DSM模型下得到的结果作为初解,变量的取值范围以初解为中心展开,可根据优化情况适当调整.若变量的取值范围还是和MGA-LT-1DSM模型中设置的一样,会极大地增加打靶的难度,很容易陷入局部最优.在该模型下,可以得到一条从地球轨道出发,一直沿速度方向推到火星,获得火星合适的引力辅助加速后一直沿速度方向推到木星,获得木星合适的引力辅助加速后推完剩余燃料,然后沿双曲线飞出太阳系的轨道.优化的最短时间约为5.667年. 之前优化的结果都是基于这样一个假设:推力方向一直沿速度方向是最快的逃逸方向.图6给出了2.2节中原来无引力辅助的轨道和推力方向经实时优化后的轨道对比,两条轨道的其他参数设置都相同,包括初始出发时间,初始燃料质量,逃逸速度的大小和方向,飞行的总时间等,唯一的区别就是推进段的推力方向不同.图中推力方向实时优化的轨道终点处的位置是40.15 AU,要大于一直沿速度方向推的40 AU,这说明之前最优推力方向的假设是不对的,结果可以进一步地优化.上面实时优化推力方向的轨道由于其他参数都已给定,优化变量只有每个积分时刻的推力方向,虽然变量很多,问题还是比较直观的.但对于有引力辅助的轨道,若在MGA-LT模型的基础上对推力方向进行实时优化,本文所采用的改进DE算法很难解决如此高维复杂的问题.从图6对比的结果来看,虽然一直沿速度方向并非最优的推力方向,但其实最优推力方向与速度方向相差很小.因此,可以采用一种折中的方法来进一步逼近最优解.图7给出了折中优化方法的飞行过程,即在原来一直沿速度方向推的轨道段中间插入几段调整轨道段,通过优化调整段轨道的推力方向和飞行时间来进一步缩短总飞行时间.为了减小优化难度,调整段的初始时刻设为沿速度方向推一段固定时间后的时刻,因为调整段的飞行时间是需要优化的,固定初始时刻基本不会影响最后优化的结果.经多次尝试,实际优化时只在地球--火星轨道段中插入一段调整轨道效果最好,这样只比原来增加了3个设计变量,即调整段的两个推力方向和一个飞行时间,优化的最短时间是5.6355年.在火星--木星轨道段中插入一段或是在地球--火星之间插入多段都没有优化出更好的值.理论上说插入多段应该会存在更优的解,但随着优化变量增加,问题复杂度和优化难度也大大增加,优化算法很难收敛到更优的解.图8给出了增加一段调整段后的轨道与无调整段轨道的对比情况;表4给出了两条轨道几个任务参数的对比情况.结合图8和表4的信息可以看出,两条轨道的地球出发时刻、地球--火星段转移时间和火星--木星段转移时间都基本相同,因此在图8中两条轨道看上去基本重合,但加入调整段的轨道比原来多优化了近28 kg 的燃料,正是这部分燃料使得探测器在出了木星之后可以多推约17天的时间,达到更大的逃逸速度,从而比原来无调整段的轨道早了十多天到达距日心40 AU处. 第六届全国空间轨道设计竞赛题目乙是利用太阳系大行星的引力辅助效应设计一条最快逃逸出太阳系的轨道.本文通过对原有引力辅助优化模型进行不断改进,逐步将脉冲方式推进的轨道转化成了完全由小推力方式推进的轨道,并优化出了相应模型下的最优解.由于改进的引力辅助优化模型特性和优化算法优化能力的限制,本文最后得到的解只是一个近最优解,离全局最优解还有微小的差距,如何得到推力方向实时优化的全局最优解有待进一步地研究.全国空间轨道设计竞赛至今已成功举办了6届,每一届比赛都能涌现出许多好的设计思路和解题方法,参赛者们通过互相交流学习实现了共同进步与提高.希望能有更多更富趣味性和挑战性的题目在以后的竞赛中出现,推动轨迹优化理论和方法不断向前发展.【相关文献】1高扬.电火箭星际航行:技术进展、轨道设计与综合优化.力学学报,2011,43(6):991-1019 2车征,李恒年,黄普等.中国空间轨道设计竞赛回顾.宇航动力学学报,2014,4(2):33-363李俊峰,祝开建.2005~2009年国际深空轨迹优化竞赛综述.力学与实践,2010,32(4):130-1374罗亚中,沈红新.第五届全国空间轨道设计竞赛总结.力学与实践,2014,36(3):379-3825 V ink'o T,Izzo D.G lobal op tim ization heu ristics and test problem s for prelim inary spacecraft trajectory design.ACT Technical Report,20086唐国金,罗亚中,雍恩米.航天器轨迹优化理论、方法及应用.北京:科学出版社,2011。
A题嫦娥三号软着陆轨道设计与控制策略摘要人类掌握航天技术之后,探测地外天体的首选目标就是月球。
我国嫦娥三号于2013年12月6日成功登陆月球,嫦娥三号是我国首次地外天体软着陆任务,由于外太空的各种因素对探测器的影响很难进行人工干扰,为了保证登月探测器在月球表面平稳降落和应对外太空的影响,本文对探测器的软着陆过程的进行了深入的研究和设计。
针对问题一,本文采用逆向推理和微元分析的思想方法,从着陆点进行倒推,将每段进行微分,分析受力和运动状态,在达到6个阶段状态要求的前提下,求解出探测器θ,最终确定近月点与的水平位移为514.8km,通过坐标变换公式得出偏转角=17.0437远月点位置为:近月点:位置——(19.51W,27.08N)正上方15km处,速度为1.68km/m,方向为探测器俯仰姿态角83.17o远月点:位置——(19.51E, 152.92S)正上方100km处,速度为1.60/km m,方向为远月点弧的切线方向。
针对问题二,在轨道设计中,本文主要考虑粗避障与精避障阶段,为了避开月球表面的大型坑洞和障碍物,本文将附录中的两幅图像都分化为100⨯100的小区域分别模拟着陆,最终利用优选法绘制出了安全区域和软着陆轨道的图像。
着陆轨道的优化是一非线性、终端时间自由且带有控制约束的最优控制问题。
本文利用着陆器质心动力学方程,对其进行归一化处理,采取直接求解法,将问题转化为目标函数为燃料最省的的优化问题,运用模拟退火算法求解,得出最小燃料消耗为468.25kg。
关键词嫦娥三号软着陆轨道优化模拟退火算法一.问题重述嫦娥三号于1时30分成功发射,抵达。
嫦娥三号在着陆准备轨道上的运行质量为2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。

轨道工程复习试题及参考答案1、名词解释1. 轨道几何形位:轨道各部分的几何形状、相对位置和基本尺寸,它包括静态与动态两种几何形位。
2. 轨底坡:钢轨底边相对轨枕顶面的倾斜度,我国直线轨道的轨底坡标准是1/40。
3. 轨距:在轨道的直线部分,两股钢轨之间应保持一定距离,轨距是指钢轨头部踏面下16mm范围内两股钢轨工作边之间的最小距离。
轨距一般采用道尺或其它工具测量。
4. 固定轴距:同一车架或转向架始终保持平行的最前位和最后位中心间的水平距离。
5. 道岔有害空间:辙叉咽喉至叉心实际尖端之间的距离。
6. 胀轨跑道:在温度力不太大时,随着温度力的增大,轨道首先在薄弱地段发生变形随着温度力的增大,变形也增大;当温度力达到临界值时,此时稍有外界干扰或温度稍有升高,轨道发生很大变形而导致轨道破坏,这一过程称为胀轨跑道。
7.道床厚度:直线轨道或曲线轨道内轨中心轴枕底下道床处于压实状态时的厚度。
8.锁定轨温:无缝线路钢轨被完全锁定时的轨温,此时钢轨内部的温度力为零,锁定轨温又叫零应力轨温。
9.欠超高:当实际行车速度大于平均速度时,要完全克服掉离心力,在实设超高的基础上还欠缺的那部分超高,叫欠超高。
10.过超高:平均速度对应的超高与实际运营的最低速度所对应的超高差。
11. 道床系数:要使道床顶面产生单位下沉必须在道床顶面施加的单位面积上的压力。
12.横向水平力系数:钢轨底部外缘弯曲应力与中心应力的比值。
13. 轨道爬行:由于钢轨相对于轨枕、轨排相对于道床的阻力不足而发生的轨道纵向位移叫轨道爬行。
14. 城市轨道交通:城市轨道交通系统泛指城市中在不同形式轨道上运行的大、中运量城市公共交通工具,是当代城市中地铁、轻轨、有轨电车、独轨交通、直线电机轨道交通、磁悬浮轨道交通等轨道交通的总称。
15.查照间隔:护轨作用边至心轨作用边的距离叫查照间隔D1(1391~1394mm);护轨作用边至翼归轨作用边的距离叫查照间隔D2(1346~1348mm)。
第八届全国空间轨道设计竞赛甲组题目李明涛1、于锡峥21.问题描述人类太空活动的飞速发展,极大地改变了我们的生活,也产生了数量庞大的空间碎片。
作为影响航天器安全运行的重要因素,空间碎片的减缓与清理已经成为航天领域的全球性关注问题。
第八届全国空间轨道设计竞赛甲组题目是太阳同步轨道空间碎片的多目标交会任务。
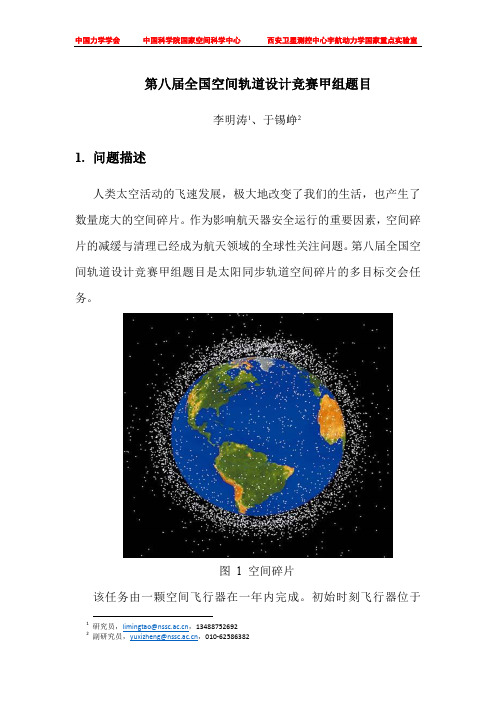
图1 空间碎片该任务由一颗空间飞行器在一年内完成。
初始时刻飞行器位于1研究员,limingtao@,134********2副研究员,yuxizheng@,010-********700km 高度的近地圆轨道上。
飞行器总重1000kg ,可配置电推进系统、脉冲推进系统或混合推进系统。
通过合理地优化设计飞行器的飞行轨迹,对太阳同步轨道上的空间碎片进行交会,交会后停留至少3600秒,然后释放重量为1kg 的碎片减缓装置。
根据交会碎片的雷达反射面积,交会并释放减缓装置后,飞行器获得不同的碎片减缓收益。
期望通过合理设计空间飞行器的飞行轨迹,使得碎片减缓收益最大化,并实现良好的时间和燃料性能。
飞行器和碎片的轨道动力学模型考虑地球扁率J2项的摄动影响。
2. 设计指标和评价标准第一设计指标定义为空间碎片减缓收益:11ni i J v ==∑ (1)n 为交会的空间碎片数量,i v 等于第i 个空间碎片的减缓收益。
假设碎片的减缓收益等于该碎片的雷达反射面积。
空间碎片的轨道数据以及雷达反射面积会随题目一起发布。
当第一设计指标相同时,第二设计指标是最小化飞行器的飞行时间:2f J T = (2)f T 为从初始时刻到交会最后一颗空间碎片并完成释放碎片减缓装置的飞行时间,单位为天。
第三设计指标为最小化飞行器的燃料消耗:3fuel J m =∆ (3)燃料的单位为公斤(kg )。
如果两组设计结果的设计指标(123J J J 、、)相差均在千分之一之内,认为两组设计指标相同。
设计指标的优先级从高到低排列,分别是123J J J 、、。
知识竞赛题1. 空间站是一种能长期在()上运行的大型载人航天器。
(1)地球低轨道(2)地球高轨道(3)月球轨道2. 空间站没有(),所以不能在轨道上作机动飞行和返回着陆,这是空间站与飞船或航天飞机的主要区别。
(1)辅助推力系统(2)太阳能电池板(3)主推力系统和着陆设备3.我国将在()年前后建成载人空间站。
(1)2020(2)2016(3)20254.我国空间实验室采用()构型。
(1)一舱(2)两舱(3)三舱5.航天器空间交会对接的控制方式有()种。
(1)2(2)3(3)46.我国“天宫一号”目标飞行器将在()年发射。
(1)2012 (2)2015 (3)20117. “天宫一号”将进行()次交会对接试验。
(1)3 (2)2 (3)58. 美国的“天空实验室”是一个()空间站。
(1)试验性(2)小型(3)军用9.建造国际空间站的主要目的是()。
(1)在太空建立一个临时性的科学实验室(2)在太空建立一个永久性的科学实验室(3)在太空建立一个永久性的天文观测站10.空间站上没有白天和黑夜,太阳每天升起和落下()次。
(1)16(2)1(3)2411. 国际空间站的美国居住舱为长期在空间站里生活的航天员提供()的睡眠设备。
(1)1个睡袋(2)1个小卧室(3)1张小床12. 太空厕所内使用()马桶。
(1)抽水(2)抽气(3)生态13. 航天员在太空行走过程中如何小便?()。
(1)脱下航天服在太空进行小便(2)返回空间站舱使用太空厕所进行小便(3)穿着强力吸尿裤进行小便14.选择航天食品的标准是()。
(1)适用性、营养价值和口味适合(2)新鲜、营养价值和食用方便(3)适用性、营养价值和方便性15.国际空间站上航天员用的水是()。
(1)燃料电池在发电过程中产生的水(2)座舱空气中水蒸汽的回收和冷凝(3)从地面带上去16. 国际空间站上的家用电器有()。
(1)微波炉(2)真空吸尘器(3)洗衣机17. 航天员在太空使用()牙膏。
第七届全国空间轨道设计竞赛乙题解法朱政帆;甘庆波【摘要】第七届全国空间轨道设计竞赛乙组题目是关于多星编队与重构的轨道设计问题.本文介绍了中国科学院光电研究院的设计方法和设计结果.设计方法包括整体设计思路、转移轨道寻优、编队方案搜索策略、连续推力轨道优化方法等,并在文中给出了具体设计步骤.搜索最优编队方案和连续推力轨道优化是提高性能指标的关键.最后,总结了此次竞赛中的体会与启示.【期刊名称】《力学与实践》【年(卷),期】2016(038)005【总页数】7页(P596-602)【关键词】星群编队;相对运动;小推力;轨道设计;竞赛【作者】朱政帆;甘庆波【作者单位】中国科学院光电研究院,北京100094;中国科学院光电研究院,北京100094【正文语种】中文【中图分类】V412.42005年,欧空局先进概念小组发起了第一届全局轨迹优化竞赛(Global Trajectory Optimization Competition,GTOC),此后每1~2年举办一届竞赛[1].受到GTOC的启发,我国由清华大学于2009年发起首届全国深空轨道设计竞赛[2],并于2013年改名为全国空间轨道设计竞赛[3].2015年,中国科学院空间应用工程与技术中心举办了第七届全国空间轨道设计竞赛.竞赛分为甲、乙两组题目,甲组题目是关于不规则小行星表面巡游探测任务,乙组题目是关于近地轨道微小卫星编队与重构任务.乙组题目相关技术对于对地遥感、地球科学、空间操作等领域的研究都具有重要意义.作者代表中国科学院光电研究院参加本届竞赛,并取得乙组一等奖.本文简要概述了乙组题目,并对设计方法进行了总结. 1.1 问题描述假定一个主星携带5个完全相同的副星在400km近圆轨道上飞行.初始时刻5个副星与主星的位置和速度均一致,需在10天内尽可能完成4种指定的目标构型:同轨道跟飞/领飞构型、平面椭圆构型、当地平面投影圆构型和三维空间圆构型.构型的顺序无限制,且每次构型仅需要3个副星参与.每种构型建立后需要保持至少2天.通过合理设计5个副星的相对运动轨迹,完成尽量多的构型编队任务,并且在任务方案设计过程中,需要考虑各副星燃料消耗均衡分配问题.副星的机动方式有两种:(1)连续推力,副星可提供不超过0.08N的连续推力,比冲Isp为1000s;(2)脉冲推力,副星通过脉冲推力进行机动可认为瞬时完成,位置不发生变化,比冲Isp为300s.设计者可根据需要任意选取其中一种.1.2 性能指标任务设计的第一性能指标为构型数目其中,ξ为完成构型的数目.重复构建同一目标构型或者构型未保持两天的均不能计算在内.在第一性能指标相同的前提下,比较第二性能指标其中,Δmi表示第i个副星在任务期间(10天)的燃料消耗质量(kg).第二性能指标不仅要求寻找燃料最优飞行轨道,而且要求各副星的燃料消耗尽量平均分配.1.3 动力学模型及约束条件副星的运动轨迹在主星轨道坐标系中描述:坐标原点位于主星的质心,X轴由地心指向主星,Y轴在主星轨道面内与X轴垂直,并与主星速度方向相同,Z轴垂直于主星轨道面,并符合右手定则.副星在该坐标系下的运动方程(Clohessy-Wiltshire方程,简称CW方程)为其中,副星相对主星的位置由x,y,z表示,n为主星的角速度,Tx,Ty,Tz分别为副星的推力在3个坐标轴上的分量,m为副星的质量.由于副星在轨道机动过程中质量变化不大,故可近似认为其加速度保持恒定,在飞行轨迹计算过程中副星的质量可取恒定初始质量m0=50kg.式(3)的解为其中,[x0,y0,z0]为副星相对位置矢量[x,y,z]在初始时刻t0的值.依据式(4)中解的形式,可形成4种构型:(1)同轨道领飞/跟飞(构型一)当构型b=0,c=0时,不存在周期项,副星的飞行轨迹可表述为当yc>0时称为领飞,当yc<0时称为跟飞. yc=-4km,4km,8km为目标构型要求.(2)平面椭圆(构型二)当b 6=0,c=0时,副星的飞行轨迹与主星共面,其相对运动轨迹为椭圆,长短半轴比为2:1,运动方程可表述为其中,b=2km,yc=-1km为目标构型要求,参与此构型的3个副星相位角(nt+φ)两两相差120◦.(3)当地水平面投影圆(构型三)当b 6=0,c 6=0时,副星的运动轨迹与主星运动轨迹异面,且当yc=0,y2+z2=(2b)2时,副星的相对运动轨迹在当地水平面内为圆形,此时其中,b=4km,z(t)=2bsin(nt+φ)为目标构型要求,并且参与此构型的3个副星相位角均相差120◦.(4)三维空间圆(构型四)当b 6=0,c 6=0时,可构建一种副星相对运动轨迹在三维空间中是圆形的构型,此时需要满足yc=0,x2+y2+z2=(2b)2,则其中,b=1km,为目标构型要求,3个副星相位角分别相差90◦,120◦和150◦.通过初步试算发现任务时间十分充裕,4种构型可在10天内全部实现.在任务设计过程中主要考虑如何降低和均衡各副星的燃料消耗以提高第二性能指标.设计思路如下:首先,对单个副星的转移轨道(原点或起始构型转移至目标构型)进行遍历搜索,选取其中总速度脉冲最小的转移轨道,副星离开起始构型的相位角和到达目标构型的相位角也由此转移轨道确定(相位角为式(4)中的nt+φ,可记为θ).其次,由于构型二、构型三和构型四存在副星之间的相位约束(构型一不存在相位约束),可通过合理设计副星进入构型的时间,使之同时满足副星间的相位约束和转移轨道的相位约束,即将相位约束转化为时间约束.对构型顺序和参与各构型的副星序列进行全局搜索,依据第二性能指标选取最优编队方案.由于连续推力比冲更高,有利于副星节省燃料消耗,因此副星选取此机动方式.最后,将最优编队方案中的脉冲转移轨道优化为满足bang-bang控制一阶必要条件的小推力转移轨道.2.1 转移轨道寻优为了便于计算,采用两脉冲转移轨道进行初步设计.基于CW方程的两脉冲转移轨道求解方法可参考文献[4].通过对原点与构型之间或构型与构型之间的转移轨道进行遍历,选取其中总速度脉冲最小的转移轨道.需要遍历的参数为:起始构型的位置和速度[rp,vp](p=1,2,···,np)、目标构型的位置和速度[rq,vq](q=1,2,···,nq),以及转移时间tk(k=1,2,···,nk).当副星从原点出发时,位置和速度均为[0 0 0],不需要遍历.当副星离开或到达构型一时,需要遍历3个领飞/跟飞位置A(yc=-4km)、B(yc=4km)和C(yc=8km),此时np=3或nq=3.当副星离开或到达构型二、构型三或构型四时需要遍历构型相位角,即每隔相位角Δθ计算副星的位置和速度,此时np=floor(2π/Δθ)或nq=floor (2π/Δθ),floor(·)表示向下取整.飞行时间tk每隔Δt取值,取值范围为tk∈[tmintmax],因此nk=floor((tmax-tmin)/Δt).两脉冲转移轨道的遍历算法流程如图1所示.通过此遍历算法可求得任意两构型间总速度脉冲最小的转移轨道.遍历结果如表1~表3所示,其中“—”表示“无”,表3中,“/”左边表示起始构型的相位角,“/”右边表示目标构型的相位角.在设计副星转移轨道时,均选取表1~表3中所记录的转移轨道.2.2 编队方案寻优编队方案包括两方面:构型顺序和副星序列.构型顺序是指4种目标构型的排列顺序,共有24种,遍历策略如图2所示.副星序列是指针对某一构型的副星选取方案.依据任务要求,每个构型需要从5个副星中选取3个副星参与.对于构型二、构型三和构型四而言,均存在10种副星序列.与其他构型不同,构型一中各位置之间相互转移需消耗燃料,针对构型一的副星选取方案需分别讨论3个副星在不同位置的情况,故有60种副星序列.每个编队方案包括一个构型顺序和4个副星序列.对于同一种构型顺序,由于各构型的副星序列不同,总共存在6×104种编队方案. 对于构型顺序和副星序列都已确定的编队方案,计算各副星在任务中消耗的总速度脉冲大小.各副星每次轨道转移均选取2.1节中的两脉冲转移轨道,所消耗的速度脉冲大小均可在表1中查找.将副星i每次轨道转移消耗的速度脉冲相加,可求得其在任务中的总速度脉冲大小Δvi.通过齐奥尔科夫斯基公式可估算燃料消耗其中,Δmi表示副星i在任务中的燃料消耗质量,ge为地球表面重力加速度(ge=9.80665m/s2).通过遍历共1.44×106种编队方案,并估算各编队方案的第二性能指标,最终选取估算燃料消耗最小的编队方案为最优编队方案.2.3 构型相位设计选取最优编队方案后,需要考虑构型二、构型三和构型四的相位约束.各副星均选取2.1节中的转移轨道,所以其到达(或离开)构型的相位角也同时确定(如表3所示).由于构型存在相位约束,可由构型中任一副星到达(或离开)构型的时间确定其他两个副星到达(或离开)构型的时间.将参与构型的3个副星分别记为sca、scb和scc,当确定sca到达此构型的时间后,其他两个副星到达构型的时间为其中,表示scb到达构型的时间,表示scc到达构型的时间,为sca到达构型的相位角,为scb到达构型的相位角,为scc到达构型的相位角,Δφab为sca和scb在此构型的目标相位差,Δφac为sca和scc在此构型的目标相位差,n为主星角速度,m1和m2均为整数,可依据设计需要选取.构型的起始时间即为确定sca离开该构型的时间后,其他两个副星离开构型的时间可表示为其中,表示scb离开构型的时间,表示scc离开构型的时间,为sca离开构型的相位角,为scb离开构型的相位角,为scc离开构型的相位角,m3和m4均为整数,可依据设计需要选取.构型的结束时间为并且,构型需维持至少两天对于sca而言,其进入该构型的时间与离开该构型的时间应满足其中,为整数,可依据设计需要选取.scb和scc的进入构型的时间和离开构型的时间也应该满足类似式(22)的关系,将上标a换成b或c即可.为了确定整个任务各次机动时间,可以先任意确定某副星一次脉冲机动的时间,通过下列准则即可推导整个编队方案各副星的脉冲机动时间,并且满足构型相位约束条件:(1)对参与同一构型的3个副星而言,当确定1个副星进入构型的时间,则另外2个副星进入构型的时间由式(15)和(16)求解;(2)对参与同一构型的3个副星而言,当确定1个副星离开构型的时间,则另外2个副星离开构型的时间由式(18)和(19)求解;(3)对于每个构型,其起止时间由式(17)和式(20)决定,并且需要满足式(21);(4)对于每个副星而言,2个构型之间的转移时间由表2确定,而在同一个构型中飞行的时间由式(22)确定;(5)若通过推导发现参与某构型的3个副星无法同时满足式(15)、式(16)或式(18)、式(19),则需要优化m1,m2,m3和m4的取值.若优化后仍无法满足,则适当调整转移轨道时间(与表2中转移时间不同);(6)构型一无相位约束,各副星到达(或离开)此构型的时间可任意选取,仅需满足式(21)即可.通过上述准则可确定各副星脉冲机动时间,求得基于两脉冲转移轨道的燃料最优编队方案.此后,采用推力幅值延拓将该方案中的脉冲转移轨道依次优化成满足bang-bang控制一阶必要条件的连续推力转移轨道,推力幅值优化方法的具体步骤可参考文献[5].2.4 设计结果本团队最终提交的设计结果如表4所示,副星依次实现构型一、构型二、构型四和构型三,其中构型一和构型二由副星1、副星2和副星3参与,构型四由副星1、副星3和副星4参与,构型三由副星2、副星4和副星5参与.各副星到达和离开构型的时间、所需的总速度脉冲大小(两脉冲),以及连续推力机动所消耗的工质均列于表4中.图3~图5为副星转移时的飞行轨迹,其中粗线表示推进段,细线表示滑行段.图3为副星1、副星2和副星3从原点出发后转移至构型一和构型二的飞行轨迹,此时副星4和副星5停泊在原点(与主星位置相同).图4为副星1、副星3和副星4转移至构型四的飞行轨迹,此时副星2停泊在构型二,副星5停泊在原点.副星1和副星3从构型二的相同相位飞离,并进入构型四的相同相位,由于转移时间不同,最终导致飞行轨迹不同,但均满足bang-bang控制一阶必要条件.飞行时间调整是为了满足构型相位约束(参考2.3节步骤(5)).图5为副星2、副星4和副星5转移至构型三的飞行轨迹,此时副星1和副星3停泊在构型四.副星5从原点出发,飞行了18圈抵达构型三,副星2和副星4分别从构型二和构型四飞离并抵达构型三.由设计结果可知,参与构型三的副星燃料消耗明显高于其他两个副星,这是因为构型三的长半轴明显大于构型二和构型四,且构型三与其他构型均不共面,因此从其他构型转移至构型三所需燃料最多.(1)本团队提交的设计结果仍具有经验成分:在最优编队方案搜索结果中,出现了多组编队方案第二性能指标估算值均相等且为最小值的情况,由于时间有限未能将其全部转化为小推力轨道进行比较,而是在其中随机选取了一个编队方案作为初值进行小推力轨道优化.因此,设计结果不能说明达到了全局最优.(2)设计方法仍可进一步改进.例如,在构型间转移轨道遍历搜索过程中,利用满足bang-bang控制一阶必要条件的连续推力轨道代替两脉冲转移轨道进行搜索,结果更为准确,并且可能因此搜索出不同的最优序列.此外,在得到完整设计结果之后,可采用优化算法将整个任务再次进行全局优化,进一步提高性能指标. (3)经过本次竞赛验证了推力幅值延拓方法[5]适用于基于CW方程的线性系统,它在连续推力轨道优化求解过程中具有良好的鲁棒性,例如对于设计结果中副星5的多圈转移轨道仍然能快速稳定地求解出满足bang-bang控制一阶必要条件的连续推力轨道.(4)从设计结果可知,质量为50kg的副星进行为期10天的伴飞任务仅需消耗数十克的燃料,这表明星群编队与重构可能具有十分广阔的应用前景.当然,副星的燃料消耗还与构型大小、任务时间等因素关系密切,因此还需要进一步分析才能得到更加确切的结论.自2009年以来,全国空间轨道设计竞赛已成功举办7届,并且在其发展的过程中逐渐形成了有别于GTOC的特色.历届竞赛题目涉及多目标、多任务、多体、多星等轨道设计问题,题目由易到难,这不仅对参赛者是一种锻炼提升的机会[6],而且对出题者也是一种挑战.最后,希望全国空间轨道竞赛能继续提出更加新颖且富有挑战性的问题,为推动我国空间轨道事业的发展尽一份力量.【相关文献】1 Izzo D.1st ACT Global Trajectory Optimisation Competition:problem description and summary of the results. Acta Astronautica,2007,61(9):731-7342 高扬.电火箭星际航行:技术进展、轨道设计与综合优化.力学学报,2011,43(6):991-10193 罗亚中,沈红新,李海阳.第五届全国空间轨道设计竞赛总结.力学与实践,2014,36(3):379-3824 杨乐平.航天器相对运动轨迹规划与控制.长沙:国防工业出版社,20105 朱小龙,刘迎春,高扬.求解航天器最优绕飞轨迹的推力幅值延拓方法.力学学报,2014,46(5):756-7696 罗亚中,李海阳,沈红新.轨道设计竞赛与航天专业研究生培养.高等教育研究学报,2013,36(4):34-37。
轨道力学试题及答案详解一、选择题1. 轨道力学中,描述物体在引力场中运动的定律是:A. 牛顿第一定律B. 牛顿第二定律C. 牛顿第三定律D. 牛顿万有引力定律答案:D2. 以下哪个参数是描述轨道形状的?A. 轨道倾角B. 轨道周期C. 轨道半长轴D. 所有选项答案:D3. 轨道力学中,开普勒第一定律指出:A. 所有行星围绕太阳运动的轨道都是椭圆B. 行星绕太阳运动的周期与轨道半长轴的立方成正比C. 行星绕太阳运动的速度是恒定的D. 行星绕太阳运动的角动量是守恒的答案:A二、填空题1. 轨道力学中,描述物体在引力场中运动的定律是______。
答案:牛顿万有引力定律2. 轨道力学中,轨道的偏心率用来描述轨道的______。
答案:扁平度3. 轨道力学中,轨道的半长轴是______。
答案:椭圆轨道的一个参数,表示椭圆的中心到其一个焦点的距离三、简答题1. 简述开普勒第二定律的内容。
答案:开普勒第二定律,也称为等面积定律,指出一个行星在椭圆轨道上绕太阳运动时,行星与太阳的连线在相等时间内扫过的面积相等。
2. 描述轨道力学中轨道的半长轴和半短轴的关系。
答案:在椭圆轨道中,半长轴(a)是椭圆的中心到其一个焦点的距离,半短轴(b)是半长轴与轨道偏心率的乘积,即 b = a * sqrt(1 -e^2),其中e是轨道的偏心率。
四、计算题1. 已知一个卫星的轨道半长轴为7000 km,轨道偏心率为0.01,求该卫星的轨道半短轴。
答案:半短轴 b = 7000 km * sqrt(1 - 0.01^2) ≈ 6999.5 km2. 如果一个卫星的轨道周期为90分钟,地球的质量为5.97 x 10^24 kg,地球半径为6371 km,求该卫星的轨道半长轴。
答案:使用开普勒第三定律,周期 T = 90分钟 = 5400秒,半长轴 a = (GMT^2 / 4π^2)^(1/3),其中GMT = (G * M)^(1/3),G为万有引力常数,M为地球质量。
第七届全国空间轨道设计竞赛甲组题目朱小龙1、王文彬2、高扬3中国科学院空间应用工程与技术中心1.问题描述第七届全国空间轨道设计竞赛甲组题目的背景设定为不规则形状小行星(Eros 433小行星,如图1所示)表面巡游探测(以及小行星重力场精密探测)任务。
该任务由1颗探测器和3颗完全相同的机器人在30天内协同完成。
初始时刻,探测器携带机器人从远处接近小行星。
此后,探测器在小行星附近的安全区域(定义见后文中的图4)飞行,不着陆小行星表面。
3颗机器人在任务期限内由探测器依次择机释放,然后自主飞往小行星表面实现软着陆,并在着陆点(及其附近区域)开展不少于2天的探测活动,对该着陆点的探测完成后,机器人可以飞往其它区域继续实施探测。
期望通过合理设计探测器和3颗机器人的飞行轨道,从而使得机器人所能探测的小行星表面区域最大化,并设法让探测器与3颗机器人的总燃料消耗质量最小化。
探测器与机器人在飞行过程中不考虑碰撞问题。
图1 Eros 433小行星2.设计指标和评价标准将Eros 433小行星表面用一系列三角形平面近似,如图2所示。
数据文件Eros433.txt中给出了所有三角形的顶点(v)及其在小行星固联坐标系(定义见1博士研究生(中国科学院大学),zhuxiaolong11@2高级工程师,wangwenbin@3研究员,gaoyang@3.2节)中的坐标位置以及各个三角形平面(f )的顶点编号,文件Eros433_label.txt 是对Eros433.txt 的进一步说明。
为简化飞行轨道的优化设计,机器人仅考虑在顶点软着陆,并且在该顶点的停留时间不少于2天,即完成对该顶点(及其附近区域)的探测,并记入1分,此后机器人可以从该顶点起飞抵达其它顶点继续实施探测。
新的探测顶点与所有此前已计分的顶点之间的距离(顶点间的距离矩阵见文件distance.txt ,顶点间距离定义为表面最短路径而非空间直线)均不得小于5km ,否则对该顶点的探测不计分。
在顶点处软着陆与起飞的定义见后文4.2节的描述。
图2 Eros 433小行星的多面体模型,包含856个顶点与1708个三角形平面第一设计指标定义为最大化3颗机器人成功实施探测的顶点数目(或对顶点探测所计的分数)之和:311v i i J ==∑(1)式(1)中,v i 表示第i 颗机器人成功实施探测的顶点数目。
当第一设计指标()1J 相同时,第二设计指标定义为最小化探测器与3颗机器人的总燃料消耗质量:321s i i J m m ==∆+∆∑(2)式(2)中,s m ∆表示探测器的燃料消耗质量(kg ),i m ∆表示第i 颗机器人的燃料消耗质量(kg )。
如果两组结果的设计指标()2J 相差0.1%之内,认为该两组结果的设计指标相同。
3. 动力学模型3.1. 小行星附近的引力势与引力加速度根据文献[1],给定场点r (探测器或机器人的位置矢量),该点处的引力势能函数为11()()22e e e e f f f f e edges f facesU G L G σσω∈∈=⋅-⋅∑∑r E r r F r(3)由式(3)可得到场点r 处的引力加速度:433a e e e f f f e edgesf facesU G L G σσω∈∈=∇=-+∑∑E rF r(4)式(3)和(4)中,G 为万有引力常数,σ为Eros 433小行星的密度332.6710kg/m ⨯。
e edges ∈表示棱边(三角形的边),e r 表示从场点r 到棱边e (或其延长线)上任意一点的距离矢量;()()1221ˆˆˆˆTTA Be A B =+E n n n n (33⨯矩阵),其中()ˆ,f f A B =n 为三角形平面f (位于棱边两侧的两个三角形平面)的外法线方向单位矢量,该矢量垂直于三角形平面f ,正向从坐标原点指向f ,1221ˆˆ,A Bn n 分别表示棱边1221,e e (12e 和21e 表示同一条棱边)的法线方向单位矢量,分别位于三角形平面A 和B 内并由三角形的第3个顶点(不在棱边上的顶点)指向棱边1221,e e ,如图3所示;e L 为线势能(Potential of a wire ),由下式计算得到:lne a b p L a b p++=+-(5)式(5)中,a 和b 为场点r 到棱边两个顶点(顶点1和顶点2)的距离,p 为棱边1221,e e 的长度。
ˆn图3 三角形平面外法线方向矢量与棱边法线方向矢量示意图式(3)和(4)中,f faces ∈表示三角形平面,f r 表示从场点r 到三角形平面上任意一点的距离矢量;()ˆˆTf f f =F n n (33⨯矩阵);f ω为带符号的立体角(signed solid angle ),由下式计算得到:()()()()1231231232313122arctanf r r r r r r ω⨯=+++r r r r r r r r r(6)式(6)中,12,r r 和3r 分别表示场点r 到三角形三个顶点的距离矢量,12,r r 和3r 分别为12,r r 和3r 的模值。
3.2. 小行星附近的轨道运动方程假设Eros 433小行星质量分布均匀,并相对惯性空间具有一个恒定的自旋角速度43.311710rad/s n -=⨯。
定义Eros 433小行星的固联坐标系如下:坐标原点位于Eros 433小行星质心,坐标系的z 轴与小行星自旋轴重合,正向指北;x 轴指向小行星的本初子午线、y 轴按右手坐标系确定。
探测器(或机器人)相对Eros 433小行星的运动仅考虑Eros 433小行星的引力作用,不考虑太阳以及其它天体引力的影响。
在Eros 433小行星固联坐标系中,探测器(或机器人)的运动方程表达如下:2433243343322x x y y z z x nyn x a T m y nx n y a T m z a T m⎧--=+⎪+-=+⎨⎪=+⎩(7)式(7)中,探测器(或机器人)的位置由,,x y z 表示,433433433,,x y z a a a 分别表示433a 的坐标分量,,,x y z T T T 分别为施加在探测器(或机器人)上的推力的坐标分量,m 为探测器(或机器人)的质量。
考虑到探测器或机器人在轨道机动过程中所消耗的燃料质量相对其本身的质量来说都是相对较小的,因此认为探测器和机器人的质量始终保持不变,即式(7)中的m 恒取常值。
后文中的运动状态变量均表示在小行星固联坐标系中。
探测器的初始质量为0300kg s m =(不含机器人),1颗机器人的初始质量为050kg r m =。
初始时刻,探测器(携带3颗机器人)质量为m =0s m +30r m ,探测器在释放第1、2、3颗机器人之后,其质量分别为00=2s r m m m +、00=s r m m m +、0=s m m 。
机器人被释放后,其质量为0=r m m 。
如果推力利用速度脉冲[]T xy z ∆=∆∆∆v 来近似表达,在速度脉冲施加的前后时刻(v t -∆,+v t ∆),探测器(或机器人)的位置不发生变化,速度发生瞬时变化: ()(),()(),()()()(),()(),()()v v v v v v v v v v v v x t x t y t y t z t z t xt x t x y t y t y z t z t z +-+-+-∆∆∆∆∆∆+-+-+-∆∆∆∆∆∆⎧===⎪⎨=+∆=+∆=+∆⎪⎩ (8)不包含速度脉冲(或连续推力)的飞行轨道仍然遵循式(7)的运动方程,但需设定===0x y z T T T 。
3.3. 燃料消耗质量探测器的推进方式有连续与脉冲推进两种,可以选取其中一种推进方式;3颗机器人仅采用脉冲推进,不采用连续推进。
(1)连续推进,提供不超过0.1N 的推力,推力幅值和方向可任意选择,发动机可任意开启或关闭。
在推进过程中,燃料消耗质量的时间变化率m (kg/s )与燃料消耗质量m ∆(kg ,从t 时刻起算)计算如下,t t t e sp e spT Tmm dt g I g I +∆=∆=⋅⎰(9)式(9)中,T =e g 为地球海平面的重力加速度,sp I 为推进比冲(=1000s sp I ),t ∆为连续推力的持续时间。
(2)脉冲推进,速度脉冲的大小和方向可任意选择,脉冲作用时刻和脉冲次数没有限制。
每次脉冲推进后,燃料消耗质量(kg )为1e spvg I m m e ∆-'⎛⎫ ⎪∆=- ⎪⎝⎭(10)式(10)中,m 为探测器(或机器人)的初始质量(恒取常值,见3.2节的相关描述),v ∆为脉冲速度大小,300s spI '=。
4. 约束条件描述(1)初始状态约束记初始时刻00t =,在小行星固联坐标系中,探测器携带3颗机器人位于半径R = 100 km 的球面上(以坐标原点为圆心),速度为0。
位置误差不超过1 m ,速度误差不超过0.001 m/s 。
(2)飞行路径约束考虑到探测器的安全,定义半轴分别为40km,30km 和20km 的椭球面,如图4所示。
探测器在飞行过程中不能飞入安全椭球面,否则,探测器还未释放的机器人不能再被释放。
设探测器在固联坐标系中的位置分量分别为,,s s s x y z ,则在任意时刻,均需要保证(位置误差不超过1 m )22222210403020s s s x y z ++-≥ (11)图4 安全椭球面(探测器安全飞行区域需在椭球面之外)机器人在飞行过程中,不能撞上小行星表面。
否则,该机器人不能再继续实施探测。
给定任意位置矢量r (等效为一个场点),可以通过计算下式(具体计算已由式(6)给出)判断该点是否位于多面体的外部:4,02f f face πωπ∈⎧⎪=⎨⎪⎩∑场点在小行星内部,场点在小行星外部,场点在小行星表面(12)因此,对于机器人的轨道数据,可以逐点计算式(12),如果某一时刻轨道数据对应的计算值为2π并且速度不为0(速度误差不超过0.001 m/s )或者计算值为4π,即可认为机器人已撞上小行星表面,该机器人探测任务结束。
(3)机器人软着陆与起飞约束机器人软着陆与起飞时刻,机器人的速度为0,着陆(或起飞)位置如下设定:三个坐标分量相对顶点分别向外偏移100m ,距离顶点约173m ,着陆(或起飞)位置的坐标已记录在文件landing_v.txt 。
末端降落与表面附着不再具体设计,也不考虑燃料消耗。
机器人在某一顶点着陆后至再次起飞期间,与小行星保持相对静止状态。
位置误差不超过1 m,速度误差不超过0.001 m/s。
(4)时间范围约束探测器释放机器人的时间间隔(即释放第1、2颗、释放第2、3颗机器人的时间间隔)不少于1天,释放第1颗机器人的时刻可任意选取;机器人在着陆顶点的停留时间不少于2天;机器人每次从一个顶点转移到另一个顶点的时间不少于0.25天,总任务期限不多于30天,从初始时刻起算30天之后的顶点探测均不再计分。