斗轮堆取料机两种俯仰形式的对比分析
- 格式:doc
- 大小:16.00 KB
- 文档页数:3

浅谈堆取料机俯仰驱动摘要:斗轮堆取料机液压俯仰驱动型式与机械俯仰型式的对比关键词:堆取料机;液压俯仰驱动;机械俯仰斗轮堆取料机作为一种广泛用于电厂、港口、钢厂、化工厂、水泥厂等基础产业用来连续装卸散料的重型设备,它具有外形尺寸较大,工作状态载荷经常变化的特点,而俯仰运动是其运动中极其关键的一环,对设备的平衡影响很大,错误的设计和选取俯仰型式会很大程度的影响设备的稳定性,严重的可能引起设备倾翻,所以深入的研究堆取料机俯仰运动意义很大,本文意在介绍堆取料机的俯仰驱动型式及简单计算并对驱动型式进行特点分析。
堆取料机的俯仰装置现今主要有两种驱动型式:1.液压俯仰驱动型式主机俯仰液压装置主要由俯仰液压站、液压锁块、液压缸、管路、管接头、胶管、密封圈等组成。
俯仰液压站由电动机、液压泵、电磁控制阀、滤油器、溢流阀、液控单向阀、闸阀、管路、管接头、密封圈、压力表、液位液温计、放油阀、油温自动加热系统等组成。
由液压缸的伸缩来完成俯仰。
液压俯仰结构的布置如图。
液压系统能保证两油缸同步工作,实现整机俯仰系统安全、平稳、可靠的工作。
液压泵站可进行泵的启动、停止、卸荷(超压保护)控制,系统的压力、流量可在允许的范围内任意调节,在环境温度过低时,可对油液加热,当超温、超压及滤油器堵塞时,可提供报警信号,从而实现超载保护,可以使俯仰油缸在任意位置停留及保持。
在液压驱动的型式下,由于液压油缸可以承受拉力也可以承受压力,而俯仰运动速度相对较慢,运动的惯性对整体的平衡影响并不大,对设备平衡影响最大的地方在于俯仰的过程中重心的变化,所以我们只需正确的计算出设备的重心便可以防止设备的倾翻。
重心的计算:由重心的特性我们知道重心左侧所有质点对重心的力矩之和等于重心右侧所有质点对重心的力矩之和,如图所示,我们以回转中心为参考,假设重心G距离回转中心的距离为X,图中左侧所有零部件的重量分别为由此可以计算出设备重心的位置,只要堆取料机在各个工况时重心的位置始终保持在回转轨道圆内按照一定的安全系数计算出的一个安全圆之内,设备便不会发生倾覆,相对于液压俯仰的型式,我们再来看下机械俯仰的结构型式及其稳定性计算。

斗轮机俯仰装置的改进设计在现代工业领域,斗轮机作为一种重要的物料装卸设备,广泛应用于港口、电厂、矿山等场所。
斗轮机的俯仰装置是其关键部件之一,负责实现斗轮的上下俯仰动作,以适应不同的工作场景和物料装卸需求。
然而,在实际应用中,现有的斗轮机俯仰装置往往存在一些问题和不足,如运行稳定性差、故障率高、维护成本高等,严重影响了斗轮机的工作效率和可靠性。
因此,对斗轮机俯仰装置进行改进设计具有重要的现实意义。
一、斗轮机俯仰装置的工作原理及组成斗轮机俯仰装置主要由俯仰油缸、俯仰铰点、俯仰钢结构、驱动装置等部分组成。
其工作原理是通过驱动装置驱动俯仰油缸伸缩,从而带动俯仰钢结构绕俯仰铰点上下转动,实现斗轮的俯仰动作。
二、现有斗轮机俯仰装置存在的问题1、俯仰油缸密封性能差由于工作环境恶劣,俯仰油缸的密封件容易磨损和老化,导致油缸泄漏,影响俯仰装置的正常运行。
2、俯仰铰点润滑不良俯仰铰点在长期运行过程中,由于润滑不足,容易出现磨损和卡死现象,增加了设备的故障率。
3、驱动装置功率不足部分斗轮机的驱动装置功率偏小,无法满足俯仰装置在重载情况下的工作需求,导致运行速度缓慢,工作效率低下。
4、俯仰钢结构强度不足在频繁的俯仰动作中,俯仰钢结构容易出现疲劳裂纹和变形,影响设备的安全性和使用寿命。
三、斗轮机俯仰装置的改进设计方案1、优化俯仰油缸的密封结构选用高性能的密封材料,如聚氨酯密封件,并改进密封结构,增加密封层数和密封压力,提高油缸的密封性能,减少泄漏现象的发生。
2、改善俯仰铰点的润滑方式采用自动润滑系统,定期对俯仰铰点进行润滑,确保铰点在良好的润滑状态下工作,减少磨损和卡死的风险。
3、增大驱动装置的功率根据斗轮机的实际工作需求,重新计算和选型驱动装置,增大其功率,提高俯仰装置的运行速度和工作效率。
4、加强俯仰钢结构的强度对俯仰钢结构进行有限元分析,优化结构设计,增加加强筋和支撑件,提高钢结构的强度和刚度,防止疲劳裂纹和变形的产生。

斗轮堆取料机的液压俯仰系统的设计包括两种方式。
一种是非整体俯仰系统,另一种是整体俯仰系统。
所谓整体俯仰系统是当俯仰机构在运动时设备的塔架、悬臂、配重体绕同一个铰轴转动同样的角度。
非整体俯仰系统是一个多连杆系统,在俯仰过程中塔架不随俯仰角度发生变化,悬臂的俯仰角度变化和配重的角度变化的角度不同,其运动由连杆连接来完成。
在堆取料机的设计中现在更多的使用整体俯仰式俯仰系统作为设备的俯仰驱动方式。
在俯仰液压系统的设计时通常有两种设计思想,一种是将油缸设计成只受压力的油缸,另一种是设计成拉压油缸。
在非整体俯仰系统中油缸可以设计成只受压力的油缸或者设计成既受压力也受拉力的油缸。
在整体俯仰式系统通常只设计成油缸既受压力也受拉力的俯仰系统。
在俯仰机构的运动过程中如果油缸只受压力,则油缸在整个的俯仰上升过程做正功,既系统始终由液压系统驱动。
在拉压油缸的系统中油缸在整个俯仰角度范围内油缸的力是在变化的,例如,当俯仰角度从最低到最高的角度变化时,油缸的受力是从受压变为受拉,在这个俯仰过程中有一个角度位置油缸的受力为零。
在受压的角度范围内液压系统做正功。
当俯仰角度达到油缸受拉的俯仰角度时液压系统做负功,也就是说由外力推动油缸运动;在俯仰系统从最高的俯仰角度运动到最低角度时通常油缸的受力状态是从受拉到受压,在油缸受拉的俯仰角度范围内液压系统是做正功,当达到受压的俯仰角度位置时液压系统开始做负功,也是外力推动油缸运动。
根据系统的这种载荷的变化,液压系统需要相应的满足这种载荷变化的要求。
一般油缸单纯受压的俯仰液压系统相对简单。
对使用即受拉也受压油缸的液压系统一般要在油缸的非载荷侧施加背压,以解决在液压系统工作期间油缸从受压到受拉,或者是从受拉到受压的变化过程中系统的速度控制和震动等问题。
所谓施加背压是指如果油缸是在受压状态,则有杆腔要有一定的压力,反之,无杆腔具有一定的压力。
这样可以保证系统在随着俯仰角度变化,油缸的受力状态发生变化时系统运动的平稳性。

斗轮机俯仰运动受力分析与方案优化作者:徐永南来源:《科学与财富》2017年第19期摘要:作为物料输送装备,斗轮机在港口、电厂、煤矿、化工等行业运用广泛,是提高物料输送效率,节约输送时间,降低输送成本的高效运输装置,但斗轮机常常在俯仰运动中出现臂架振动,产生原因一般有对受力状态掌握不清导致选择不合理配重,以及因系统设计不合理导致使用了不满足工作条件的液压元件。
本文主要分析斗轮机在空载、取料以及堆料这三种状态下,俯仰运动下液压缸的受力情况,并针对斗轮机做俯仰运动时的受力特点探讨如何改进液压系统,解决臂架振动。
关键词:斗轮机;俯仰运动;臂架振动;受力分析斗轮机是斗轮堆取料机的简称,被广泛应用在建材、煤矿、港口等货流量较大的场地中,是装卸物料的大型运输机器,其主机的俯仰运动是斗轮机的主要工作环节,且能量消耗较大,同时伴随有臂架的振动问题。
为了解决振动问题,提高斗轮机工作寿命,提高装卸效率,以下将对DQ1250.35整体型斗轮机的俯仰运动在空载、堆料、取料状态下的液压缸受力进行分析,找出导致臂架振动的原因,并提出改进措施。
1液压缸受力状况斗轮机俯仰结构主要有液压变幅和机械变幅两种方式,目前广泛使用的是液压变幅。
传统液压结构有能源消耗大、油源装置体积大、对油液敏感等不利因素,而交流变频技术的发展,产生了直驱式液压系统,具有对电机控制灵活、液压机构出力大等优点,与传统液压系统相比,节能效果明显,体积较小,对油污染不敏感,因此常适用于斗轮机。
斗轮机一般有整体和非整体两种,整体型的俯仰系统一般只设计为液压缸既受拉力也受压力;非整体型的主机俯仰系统通常将液压缸设计为既受拉力又受压力,或者只受压力。
本文分析的DQ1250.35斗轮机为整体型,整体型俯仰系统中,液压缸常受到负压,会出现由受拉到受压的转变过程,这种特殊状况的出现导致若要保证臂架工作时运行平稳,要求液压缸出油腔具有足够压强。
1.1空载时液压缸受力状况空载运行时,对斗轮机臂架转轴产生力矩作用的为部件m1~m16自重以及液压缸作用力F。
臂式斗轮堆取料机俯仰液压系统分析l引言臂式斗轮堆取料机是一种大型高效堆取料设备。
它具有堆取料能力大,料场占地面积小,操作方便,实现自动控制等优点而被工业部门广泛使用。
近30年来,由于燃煤火力发电机组的容量迅速增长,输煤系统也随之大型化。
这种变化对输煤系统的可靠性和生产率提出了更高的要求。
输煤系统选用什么堆取设备主要取决于电厂的总装机容量,即耗煤量。
现代大型火力发电厂的输煤系统普遍采用臂式斗轮堆取料机这种大型高效堆取设备。
臂式斗轮堆取料机俯仰机构的作用是支承斗轮和臂架的重量,并能改变斗轮的高度,使斗轮可以在不同高度上堆料和取料。
它的工作安全可靠性非常重要。
一旦发生臂架坠落事故,会造成斗轮堆取料机严重破坏。
臂式斗轮堆取料机的俯仰机构有机械和液压两种型式。
后者具有体积小,结构简单,维修量小,工作可靠等优点而被广泛采用。
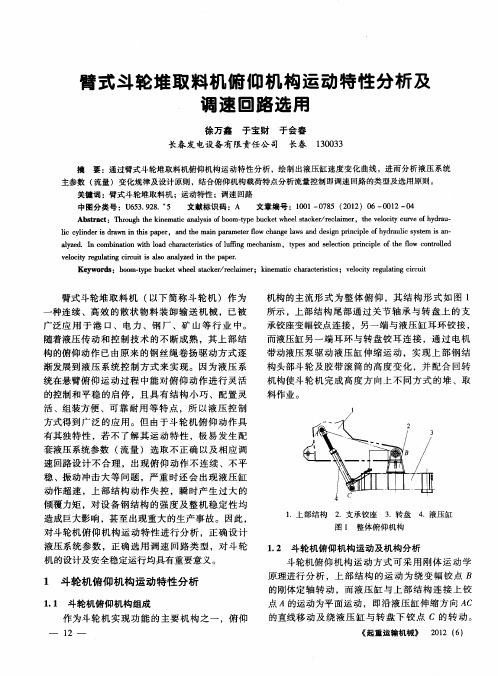
液压俯仰机构如图1所示。
臂架后端铰接在门柱上,液压缸一端铰接在门柱下方,另一端铰接支承在回转机构上,来实现臂架的俯仰动作,使斗轮达到不同高度。
目前,由于投资的多元化,我国火力发电厂的输煤系统和其它行业现役的臂式斗轮堆取料机既有国产的,又有国外的。
由于俯仰机构液压系统不同而导致不同厂家的斗轮堆取料机的安全可靠性差别很大。
为此,本文对我国两家具有代表性火力发电厂输煤系统中的臂式斗轮堆取料机的俯仰液压系统进行分析比较,以期对我国臂式斗轮堆取料机性能的提高有所帮助。
2两种俯仰液压系统分析比较图2所示为装在辽宁绥中发电厂,由俄罗斯生产的斗轮堆取料机的俯仰液压系统。
图3为用于河北邯峰发电厂,由上海水工机械厂生产的臂式斗轮堆取料机俯仰液压系统。
从原理和动作过程来看,两者差别很大。
(l)液压泵两系统都采用轴向柱塞泵作为液压驱动装置,用溢流阀控制系统的压力。
在泵的出口都接有滤油器,以防系统混人杂质。
图2的滤油器旁并联有单向阀。
这样,可以在不停机的情况下更换滤油器。
而图3所示系统中滤油器旁没有并联单向阀。
因此,必须在停机状态下更换滤油器。
斗轮堆取料机走简介和行装置常见故障的分析与处理一、斗轮机简介斗轮堆取料机(bucket-wheel stacker-reclaimer由门座行走机构回转机构变幅悬臂斗轮和尾车组成用于煤场堆取料作业补充:斗轮堆取料机简称斗轮机,是现代化工业中连续装卸散状物料的一种重要设备, 主要用于港口、码头、冶金、水泥、钢铁厂、焦化厂、储煤厂、发电厂等大宗散料如矿石、煤、焦炭、砂石等在存储料场的堆放、提取作业。
斗轮堆取料机主要有门式与摇臂式(图示两种构造,据悉,一种型的牵引式斗轮堆取料机马上面世,其特征是一个装有斗轮的牵引机构在散料场地上万向行走,通过一个输送臂牵引着轨道行走机构在轨道上滑行,其制造本钱仅为目前门式与摇臂式产品的1/3。
补充:桥架式斗轮堆取料机按桥架形式又分为门式和桥式两种。
①门式斗轮堆取料机:它有一个门形的金属构架和一个可升降的桥架。
门架横梁上有一条固定的和一条可移动且可双向运行的堆料带式输送机,在门架一侧的料场带式输送机线上设有随门架运行的尾车。
无格式斗轮通过圆形滚道、支承轮、挡轮套装在可沿升降桥架运行的小车上,桥架内装有带式输送机。
堆料时,物料经料场带式输送机、尾车转至堆料带式输送机上,最终抛卸至料场。
通过门架的移动及其上堆料带式输送机的运行,使物料形成肯定外形的料堆。
取料时,由横向运行的小车及其上旋转的斗轮连续取料,物料在卸料区卸到桥架带式输送机上,最终转卸到料场带式输送机运走。
通过桥架的升降和门架的运行,可将料堆取尽。
②桥式斗轮取料机:与门式斗轮堆取料机在构造上的主要区分是:它没有高大的门架,桥架是固定不升降的,而且处于较低位置;没有堆料带式输送机和尾车;在斗轮的前方有固定在小车上的料耙.小车运行时带动料耙沿料堆端面运动,使上面的散料下滑,以便斗轮取料。
料耙还能使由堆料机按不同物料分层堆放的物料在下滑时混匀,因此往往又称为桥式斗轮混匀取料机。
二、走行装置常见故障的分析与处理斗轮堆取料机的走行装置是支承整机重量的重要部件。
斗轮堆取料机两种俯仰形式的对比分析
作者:孙玉东王晓生
来源:《科技创新与应用》2015年第15期
摘要:随着我国经济的快速发展,斗轮堆取料机在我国的矿场、电厂、港口码头等地方的使用逐渐增多,通过使用斗轮堆取料机可以较为方便的完成物料短距输送与装卸,是一种非常实用的机械设备。
其中,在斗轮堆取料机的动作中,其俯仰动作是一种较为常用的动作,其通过采用相应的俯仰驱动来带动悬臂、悬臂传送带一级斗轮和配重的运动,同时由于斗轮堆取料机常年工作在露天的环境中,选用合理的俯仰驱动方式对于斗轮堆取料机的稳定性与可靠性有着巨大的影响。
文章将就斗轮堆取料机的俯仰驱动方式进行介绍.
关键词:斗轮堆取料机;俯仰方式;优缺点
前言
随着经济的快速发展,斗轮堆取料机是一种能够高效进行散装料的大型设备,现今广泛使用于各种港口、码头以及发电厂中的存储料堆取作业中,其装卸能力可以达到每小时万吨以上。
其中斗轮堆取料机的俯仰是其动作的重要一种,对于进行堆取料的作业有着重要的作用。
由于堆取料机长期处于露天作业下,周边的环境对其工作特性有着重要的影响,文章将就斗轮堆取料机的两种俯仰特性进行介绍。
1 斗轮堆取料机的机械俯仰形式
斗轮堆取料机主要是由斗轮机构、回转机构、带式输送机、尾车以及俯仰与运行机构等组成,其中斗轮堆取料机的俯仰主要是通过带动悬臂中的斗轮机构、回转机构等的上下运动。
斗轮堆取料机的机械俯仰采用的是卷扬机带动钢丝来提升或降低悬臂,斗轮堆取料机的机械俯仰主要是由电动卷扬机、动/定滑轮组,悬臂平衡装置以及钢丝绳的组成,其中钢丝卷扬驱动机构采用的是由电动机通过减速机构来带动卷扬机旋转,通过钢丝绳来带动悬臂以及回转机构和斗轮机构等运动,对于斗轮堆取料机俯仰机构的制动采用的是电力液压式的制动方式,推动器Ed型带下降阀,通过下降阀进行一定的调整可以有效的延长推动器的下降时间,从而减少因下降所带来的冲击力,延长斗轮堆取料机的使用寿命。
由于斗轮堆取料机的悬臂的吊升采用的双钢丝绳的方式,因此,在斗轮堆取料机的钢丝绳卷扬系统中,需要采用平衡卷筒来确保两侧钢丝绳的受力保持均衡,避免因钢丝绳受力不均而导致的钢丝绳断裂,同时还需要确保当一根钢丝绳因故障发生断裂时,斗轮堆取料机的悬臂梁不会坠落而产生事故。
在进行斗轮堆取料机的机械俯仰形式的稳定性计算时,也需要对整个斗轮堆取料机的重心进行一定的计算,从而确保斗轮堆取料机的悬臂在进行运动时斗轮堆取料机的重心保持稳定,不会由于斗轮堆取料机的悬臂运动而产生不稳定现象。
在完成了对于斗轮堆取料机的重心计算
基础上还需要额外考虑一个问题,就是钢丝绳的拉力问题,相较于采用液压斗轮堆取料机俯仰驱动方式,由于液压油缸既可以承受拉力又可以承受压力,而钢丝绳仅可以承受拉力,而无法承受一定的压力,在斗轮堆取料机进行动作时,斗轮堆取料机的悬臂的动作是通过卷扬机来带动钢丝绳的运动而实现的,在进行俯仰运动时,当运动到一定的角度导致斗轮堆取料机的后部配重部分相对铰点的力矩要小于前部的力矩之和时,俯仰结构中所采用的钢丝绳仅仅需要承受的是以上两者之间的差值拉力,而当后部配重部分相对铰点的力矩超过了前部的力矩之和时,而此时钢丝绳不受力,从而导致斗轮堆取料机的悬臂梁上升,当上升到一定的程度而导致斗轮堆取料机的整体重心发生变化,极易造成斗轮堆取料机后翻,以此导致危险事故的发生。
因此,在斗轮堆取料机的机械俯仰动作中,要时刻注意保持配重的力矩不超过前部力矩,并确保钢丝绳的实际拉力控制在允许的范围内,从而确保斗轮堆取料机机械俯仰的正常运行。
相较于斗轮堆取料机的液压俯仰机构,两者由于结构形式的不同导致斗轮堆取料机在整体结构方面也存在着一定的差别,从而导致斗轮堆取料机的整体造价存在的着很大的差异,严重的情况下两种形式的造价甚至相差数倍,因此,如果从斗轮堆取料机的经济性方面进行考虑,斗轮堆取料机的机械俯仰形式具有较大的优势,但是,由于斗轮堆取料机机械俯仰形式中所采用的钢丝绳所承受的拉力有限,因此,在需要进行大吨位的原料装载输送或者是斗轮堆取料机的悬臂较长时,由于斗轮堆取料机前段的斗轮结构、回转结构以及皮带输送机构的重量较重,这样就会造成斗轮堆取料机机械俯仰中的钢丝绳所承受的附加拉力增大,而且由于并且由悬臂物料产生的前部重力也会使堆取料机的重心前移很多,使得斗轮堆取料机的整体重心存在着极大的偏差,从而造成斗轮堆取料机具有极大的前倾风险。
由于斗轮堆取料机具有以上介绍的这些缺点,导致机械俯仰在斗轮堆取料机的使用中存在着较大的局限性,在一些大型的或者是悬臂较长的斗轮堆取料机中无法使用机械俯仰,而只能依靠液压俯仰驱动,且仅能依靠增加配重在空载时的大幅度后调重心来解决由于悬臂过长等而导致的重心前移的问题,这一问题采用斗轮堆取料机机械俯仰驱动方式是无法解决的。
2 斗轮堆取料机的液压俯仰驱动形式
以上通过对斗轮堆取料机的机械俯仰驱动进行了介绍,机械俯仰驱动适用于悬臂较短或者是斗轮机构较小的斗轮堆取料机。
而采用液压俯仰驱动形式则可以规避这些问题,下文将就斗轮堆取料机的液压俯仰驱动进行介绍。
斗轮堆取料机的液压俯仰驱动组成:斗轮堆取料机的液压俯仰驱动主要是由俯仰液压站、液压锁块、液压缸、管路、管接头、胶管、密封圈等组成。
俯仰液压站由电动机、液压泵、电磁控制阀、滤油器、溢流阀、液控单向阀、闸阀、管路、管接头、密封圈、压力表、液位液温计、放油阀、油温自动加热系统等组成。
其主要动作主要是通过液压系统来驱动液压缸的伸缩来完成斗轮堆取料机的悬臂的升降的。
其中斗轮堆取料机液压俯仰系统中的液压泵站可进行泵的启动、停止、卸荷(超压保护)控制,系统的压力、流量可在允许的范围内任意调节,在环境温度过低时,可对油液加热,当超温、超压及滤油器堵塞时,可提供报警信号,从而实现超
载保护,可以使俯仰油缸在任意位置停留及保持。
在液压驱动的型式下,由于液压油缸可以承受拉力也可以承受压力,相较于机械俯仰驱动形式,液压俯仰运动速度相对较慢,运动的惯性对整体的平衡影响并不大,对设备平衡影响最大的地方在于俯仰过程中重心的变化,所以我们只需正确的计算出设备的重心便可以防止设备倾翻。
在进行斗轮堆取料机的重心计算时,需要结合斗轮堆取料机的机构形式来计算重心,同时由于斗轮堆取料机的特性我们知道重心左侧所有质点对重心的力矩之和等于重心右侧所有质点对重心的力矩之和,当完成了对于斗轮堆取料机重心的计算后,则只要堆取料机在各个工况时重心的位置始终保持在回转轨道圆内按照一定的安全系数计算出的一个安全圆之内,便可以确保斗轮堆取料机在运行的过程中不会发生危险,通过对比可以发现,相对于斗轮堆取料机的机械俯仰驱动形式,斗轮堆取料机的液压俯仰驱动形式具有较大的优点,但是由于不同的俯仰形式也会造成斗轮堆取料机的结构存在一定的差别,从而导致两中形式之间的价格存在极大的差异。
因此,需要结合形式选用合适的俯仰形式。
3 结束语
斗轮堆取料机是一种在港口、发电厂、码头等广泛应用的原料连续装卸的重型设备,其中斗轮堆取料机俯仰机构是控制斗轮堆取料机悬臂梁进行上下运动的重要机构,对于斗轮堆取料机的正常工作有着十分重要的意义,文章通过对斗轮堆取料机的两种主要的俯仰机构形式进行介绍及对比,并对两种俯仰形式的优缺点进行了一定的说明。
参考文献
[1]吴井辉,葛俊波,等.斗轮堆取料机常见故障的处理及预防[J].企业技术开发,2011,3.
[2]王英洁,李毅民,等.臂式斗轮对取料及回转装置常见故障的分析[J].起重运输机械,2012,2.
[3]周奇才,何群,邵新建,等.两类斗轮堆取料机挖掘切割边长计算方法[J].同济大学学报,2003,3.。