斗轮堆取料机解析
- 格式:ppt
- 大小:4.98 MB
- 文档页数:8

第三章斗轮堆取料机、概述一煤场机械形式的门式滚轮机及装卸桥。
:斗轮堆取料机、煤场机械的种类很多,常用的有取决于煤场的形状。
斗轮堆取料机常用于条形煤场中。
选择, 是一种大型、连续、高效的散料装斗轮堆取料机是在斗轮挖掘机的基础上发展起来的, 卸机械。
它具有生产效率高、能耗低、自重轻、投资省及操作简便等优点。
斗轮堆取料机可分为履带其分类方法也较多。
按行走机构的形式,斗轮机的形式很多,斗轮堆取料机可分为活配重式、死配重式、轮胎式及轨道式三种;按斗轮臂架的平衡方式,生产率在斗轮堆取料机可分为轻型斗轮堆取料机(式及整体平衡式三种;按理论生产能力,之间的斗~2500m3/h(生产率在630、630m3/h以下的斗轮堆取料机为轻型)中型斗轮堆取料机凡之间的斗轮~5000m3(生产率在25O0轮堆取料机为中型斗轮堆取料机)、大型斗轮堆取料机之间的斗10000m3/h生产率在5000~堆取料机为大型斗轮堆取料机)、特大型斗轮堆取料机(以上的斗轮堆取10000m3/h、巨型斗轮堆取料机(生产率在轮堆取料机为重型斗轮堆取料机) 。
料机为巨型斗轮堆取料机)斗轮堆取料机,是一种大型、连续、高效的散料装卸机械。
本设备具DQL2400/2400.38的散状物料,是大中350mm0~有单向堆料、单向取料及堆料分流功能。
可适用于堆、取粒度型火力发电厂、码头、矿山、冶金、化工等工矿企业的储料场专用堆取设备。
二、主要结构及工作原理1.设备构造及工作原理设备由斗轮机构、悬臂胶带机、俯仰钢结构、行走机构、俯仰机构、回转机构、中部料斗、附属结构、尾车、机电保护装置、洒水除尘系统、润滑装置、液压系统、电气室、司机装有悬臂胶带机及配重组的上部金属结构的俯仰铰点位于回转电气系统、配重等组成。
室、支撑着设备整个回转机构由回转轴承及回转驱动装置组成,上部与回转平台相连,平台上。
回转实现斗轮堆取料机上部回转。
在回转驱动装置作用下回转部分,下部与门座架相连。
斗轮堆取料机方案1. 引言斗轮堆取料机是一种用于堆放和取料的自动化设备,其主要应用于物料仓库、生产线等场合。
本文将介绍一种基于斗轮堆取料机的方案,其原理、设计要点以及应用范围等均将作详细阐述。
2. 工作原理斗轮堆取料机主要由传动系统、斗轮系统和控制系统组成。
工作时,传动系统将电机的动力传递给斗轮系统,斗轮系统通过一组特殊设计的斗轮将物料从堆垛中抓取到机器内。
控制系统负责对斗轮的运动和抓取力度进行调控,以实现高效的取料。
3. 设计要点3.1 斗轮设计斗轮的设计是斗轮堆取料机中至关重要的部分。
在本方案中,斗轮采用先进的输送带材料,具有耐磨性和高强度,以确保长时间使用不发生磨损和断裂的情况。
同时,斗轮的表面采用特殊加工,以增加对物料的摩擦力,提高抓取效果。
3.2 传动系统设计传动系统采用高效的减速器和电机组合,以确保斗轮具有足够的力量和速度来抓取物料。
减速器的选择考虑了机器的负载和工作环境,以保证传动系统的稳定性和可靠性。
3.3 控制系统设计控制系统使用先进的PLC控制器,可以根据实际需要对斗轮的运动和抓取力度进行精确控制。
同时,控制系统还具有实时监测和故障诊断功能,以确保设备的安全运行和及时维修。
4. 应用范围斗轮堆取料机方案适用于以下场合: - 物料仓库:可用于对堆垛的物料进行抓取和取料,提高仓库操作效率。
- 生产线:可用于对生产线所需的原材料进行自动化提供,降低人工操作的成本和风险。
- 化工行业:可用于搬运和处理液体或固体材料,提高化工生产过程的效率和安全性。
5. 优势和特点5.1 高效率斗轮堆取料机方案通过自动化的操作方式,大大提高了物料的堆放和取料效率,节省了人力和时间成本。
5.2 稳定性和可靠性设计精良的斗轮和传动系统,以及先进的控制系统,确保了设备的稳定性和可靠性,在长期的使用中不易发生故障。
5.3 灵活多样斗轮堆取料机方案可以根据实际需求进行个性化定制,满足不同材料和工作环境的需要。

斗轮堆取料机工作原理
斗轮堆取料机工作原理如下:
1. 斗轮组成:斗轮堆取料机主要由斗轮、传动机构和支撑结构组成。
2. 斗轮:斗轮通常由一组平行分布的斗板组成,每个斗板上都有一个斗形容器,用于容纳和携带物料。
斗轮可以通过电机或液压缸进行驱动。
3. 传动机构:传动机构将电机或液压驱动的力量传递给斗轮,使其转动。
传动机构通常由齿轮、链条或皮带组成。
4. 支撑结构:支撑结构用于支撑和固定斗轮堆取料机,确保其稳定运行。
5. 工作原理:斗轮堆取料机通过斗轮的转动,将物料从堆料区域挖取到斗轮上,然后通过转动将物料在空中抛离。
抛离的物料会形成一个弧形轨迹,最终落入所需的位置或传送带上。
整个过程可以重复进行,以实现快速、高效地搬运物料。
总的来说,斗轮堆取料机通过斗轮的转动和物料的挖取、抛离等动作,实现了物料的取料和搬运。
这种取料机广泛应用于煤炭、矿石、建材等行业,具有自动化程度高、搬运效率高等特点。
臂式斗轮堆取料机取料过程解析【摘要】悬臂式斗轮堆取料机的大范围普及是现代工业深入发展的产物,其应用的领域极广,如火电厂、矿山、水泥厂、港口、电力行业等。
悬臂式斗轮堆取料机的结构部件包括门座、行走机构、上部结构、斗轮机构、回转平台、前臂架等,其中斗轮机构属执行机构,其对实现臂式斗轮堆取料机取料具有关键性的作用。
本文介绍了悬臂式斗轮堆取料机的取料流程,同时分析了悬臂式斗轮堆取料机取料过程。
【关键词】臂式斗轮堆取料机;切削体积;取料过程悬臂式斗轮堆取料机的分层取料工艺通常以回转为主,即从最上层物料开始直至最底层,再从最底层物料返向最上层,如此循环往复地取料。
其中臂式斗轮堆取料机的取料作业是由回转机构、行走机构、斗轮机构等复合运动所实现的,而进给动作属直线运动,且取料动作囊括了两个运动。
本文立足于单个运动切屑物料的体积,求得若干运动复合运动切屑物料的体积。
1.斗轮自转一次单个斗子所切切屑的体积若斗轮铲取物料的方式为准连续输送方式,那么单个斗轮循环动作必然被划分为三大阶段:如果θ1为0°,第一阶段斗轮的装料过程应当以铲斗刃口切入物料为起点;如果θ1为90°,此时铲斗必然已经装载饱和,且已经完成装料过程,那么从θ2处开始卸料直至θ3,即第二阶段斗轮的卸料过程结束;待空斗重新回转至起始点后,便结束了单个斗轮自转循环动作,此为第三阶段。
2.前臂架回转一次单个斗子所切切屑的体积假设斗轮实行任意层定点取料,此时斗轮会受到前臂架的驱使而以回转中心为中心循环回转,且斗轮在各取料循环后切出另一月牙形(见图二)。
如果前臂架与斗轮机行走方向的夹角α为0°,那么从理论角度讲,切屑厚度由中间逐渐向两侧变薄;如果回转角为60°,那么斗子切取物料的体积明显较0°时少,此时物料生产率也呈减少趋势。
由此可见,前臂架回转角度只有不超过60°,才能确保斗轮堆料机定量取料和取料生产率稳定。
关于斗轮机堆取料作业的工艺及特点斗轮机的形式很多,其分类方法也较多,按理论生产能力,可分为①轻型、中型、大型、特大型、巨型五种,我厂根据条形煤场的结构采用了轨道式DQ1200/1200.30型斗轮机,具有堆料、取料,取料通过折返等多功能,可在-20~+45°温度范围内,7 级大风以下连续进行堆取煤,取煤时,由斗轮机把堆积在煤场上的煤挖取到悬胶带机上,再经中部转运料斗落入系统胶带上运走,堆煤时,由系统胶带机运来的煤,经尾车,悬胶带机向煤场堆放,有大车行走、回轮、变幅、斗轮传动、胶带机等传动机构之间的连锁保护。
一、堆料作业工艺堆料作业工艺有行走为主的堆料,旋转为主的堆料和定点堆料三种基本方式,下图为断续行走堆料图,堆料分数层数列进行断续行走定点堆积,作业从第一列的第一点01-1开始,一堆接一堆地进行堆积,当达到行走极限范围后,进行换列操作,从点02-1向反方向堆积,当堆完第一层各列后,进行换层操作,继续第二层堆积,继而堆完最后一小堆。
断续行走堆料作业形成矩形料堆,因而堆场利用率高,堆积过程扬尘少,有利于环境保护,对于不同的输送量,堆料长度可以调整,这样总可以堆出比较规则的料堆。
(一)定点堆料是将斗轮堆取料机在堆料时,悬臂的仰角和水平角不变,待煤堆到一定高度时,开动大车到另一点堆料,这种方法耗电少,但煤堆外形不规整、煤场利用系数低。
(二)断续旋转加断续行走定点堆料,第一层分成数进行堆积,以减少扬尘,最后一层堆完后,臂架高度保持不变,按预先设定的旋转方向和角度放置到第二料堆继续堆积,每达到旋转范围后,即开动行走机构微动一个设定距离,这样一直堆积到设定的料堆长度后停止作业。
(三)连续旋转堆料,作定过程中,臂架始终固定在预定堆积高度上往返旋转堆积,达到设定次数后,行走机构微动一个设定距离,依次1、2、3……进行作业,旋转堆料工艺在原材料输送量不连续或量少的场合,可按输送量高速堆设长度,得到较规则的料堆,因而堆取料作业效率较高。
工程技术科技创新导报 Science and Technology Innovation Herald93臂式斗轮堆取料机(以下简称斗轮机)属于大型、连续、高效的散料装卸机械,广泛应用于大型散货码头、钢铁、水泥、火力发电和矿山等企业的散料输送系统中,是散料输送系统的核心。
以倡导节能环保,节约能源消耗量为目标,斗轮机选择作业工艺的原则是操作简单,作业效率高,能耗低。
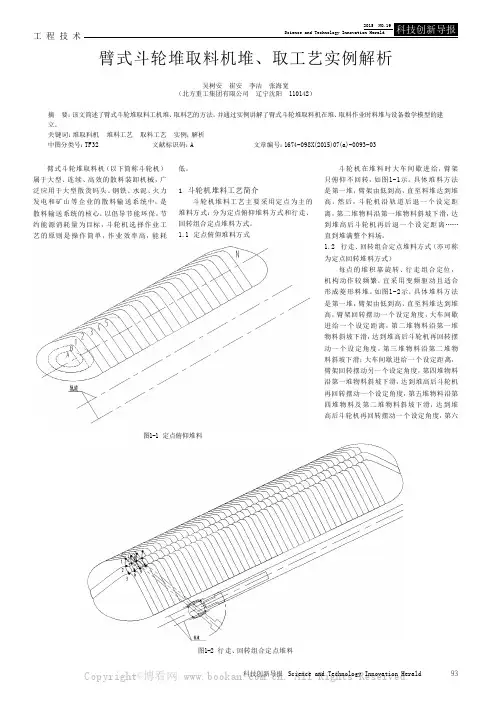
1 斗轮机堆料工艺简介斗轮机堆料工艺主要采用定点为主的堆料方式:分为定点俯仰堆料方式和行走、回转组合定点堆料方式。
1.1 定点俯仰堆料方式斗轮机在堆料时大车间歇进给,臂架只俯仰不回转,如图1-1示。
具体堆料方法是第一堆,臂架由低到高,直至料堆达到堆高,然后,斗轮机沿轨道后退一个设定距离,第二堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再后退一个设定距离……直到堆满整个料场。
1.2 行走、回转组合定点堆料方式(亦可称为定点回转堆料方式)每点的堆积靠旋转、行走组合定位,机构动作较频繁,宜采用变频驱动且适合形成菱形料堆。
如图1-2示。
具体堆料方法是第一堆,臂架由低到高,直至料堆达到堆高,臂架回转摆动一个设定角度,大车间歇进给一个设定距离,第二堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第三堆物料沿第二堆物料斜坡下滑;大车间歇进给一个设定距离,臂架回转摆动另一个设定角度,第四堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第五堆物料沿第四堆物料及第二堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第六臂式斗轮堆取料机堆、取工艺实例解析吴树安 崔安 李洁 张海宽(北方重工集团有限公司 辽宁沈阳 110142)摘 要:该文简述了臂式斗轮堆取料工机堆、取料艺的方法。
并通过实例讲解了臂式斗轮堆取料机在堆、取料作业时料堆与设备数学模型的建立。
关键词:堆取料机 堆料工艺 取料工艺 实例;解析中图分类号:TF32 文献标识码:A文章编号:1674-098X(2015)07(a)-0093-03图1-1 定点俯仰堆料图1-2 行走、回转组合定点堆料Copyright©博看网 . All Rights Reserved.工程技术科技创新导报 Science and Technology Innovation Herald94堆物料沿第五堆物料及第三堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度;大车间歇进给一个设定距离,臂架回转摆动另一个设定角度……直到堆满整个料场。
斗轮堆取料机走简介和行装置常见故障的分析与处理一、斗轮机简介斗轮堆取料机(bucket-wheel stacker-reclaimer)由门座行走机构回转机构变幅悬臂斗轮和尾车组成用于煤场堆取料作业补充:斗轮堆取料机简称斗轮机,是现代化工业中连续装卸散状物料的一种重要设备,主要用于港口、码头、冶金、水泥、钢铁厂、焦化厂、储煤厂、发电厂等大宗散料如矿石、煤、焦炭、砂石等在存储料场的堆放、提取作业。
斗轮堆取料机主要有门式与摇臂式(图示)两种构造,据悉,一种新型的牵引式斗轮堆取料机即将面世,其特征是一个装有斗轮的牵引机构在散料场地上万向行走,通过一个输送臂牵引着轨道行走机构在轨道上滑行,其制造成本仅为目前门式与摇臂式产品的1/3。
补充:桥架式斗轮堆取料机按桥架形式又分为门式和桥式两种。
①门式斗轮堆取料机:它有一个门形的金属构架和一个可升降的桥架。
门架横梁上有一条固定的和一条可移动且可双向运行的堆料带式输送机,在门架一侧的料场带式输送机线上设有随门架运行的尾车。
无格式斗轮通过圆形滚道、支承轮、挡轮套装在可沿升降桥架运行的小车上,桥架内装有带式输送机。
堆料时,物料经料场带式输送机、尾车转至堆料带式输送机上,最后抛卸至料场。
通过门架的移动及其上堆料带式输送机的运行,使物料形成一定形状的料堆。
取料时,由横向运行的小车及其上旋转的斗轮连续取料,物料在卸料区卸到桥架带式输送机上,最后转卸到料场带式输送机运走。
通过桥架的升降和门架的运行,可将料堆取尽。
②桥式斗轮取料机:与门式斗轮堆取料机在结构上的主要区别是:它没有高大的门架,桥架是固定不升降的,而且处于较低位置;没有堆料带式输送机和尾车;在斗轮的前方有固定在小车上的料耙.小车运行时带动料耙沿料堆端面运动,使上面的散料下滑,以便斗轮取料。
料耙还能使由堆料机按不同物料分层堆放的物料在下滑时混匀,因此往往又称为桥式斗轮混匀取料机。
二、走行装置常见故障的分析与处理斗轮堆取料机的走行装置是支承整机重量的重要部件。
斗轮堆取料机斗轮体结构分析与优化设计摘要:斗轮式取料机在煤矿、汽车运输、公路建设等领域中有着无可取代的地位,它是一种高效率的设备,是大体积物料的搬运装置。
利用有限元数据分析的方法,通过构建试验模型,对优化设计进行验证,使得现在的斗轮体体积减小,使斗轮体整体重量减轻,从而节约了原料,并降低了制造费用。
关键词:斗轮堆取料机;斗轮体结构;有限元分析;优化设计前言:斗轮堆取料机是全球范围内规模最大的一种散料处理成套设备,在火力发电厂、港口码头、钢铁以及矿山等领域有着重要应用价值。
随着散料输送系统的快速发展,斗轮堆取料机开始朝着自动化、系列化、大型化的方向发展。
它是由斗轮机构、前臂架、平衡机构、回转机构、门座架和行走机构等构成,其中,斗轮机构是其实现堆取料功能的重要构件,处于前悬臂的最前端,其重量对整机的重量和平衡木有直接的影响。
所以,要实现斗轮本体的轻量化,需要对斗轮体结构进行优化设计。
1.斗轮堆取料机斗轮堆取料机是一种重要的散料处理装备,在我国热电厂、冶金、矿山等特殊产业的迅速发展中,其装备水平逐步提高,它在矿业、钢铁冶炼、电力、交通、水泥、化工等领域有着广泛的应用。
该系统包括:斗轮、前臂构架、相对平衡构架、回位构架、车门构架以及与行走有关的机械部件。
以此为基础,斗轮与机械装置是其堆积与回收的重要特点。
由于其位置在前轮吊杆顶端,所以其重量对整机的自重及动力平衡都有很大的影响。
由于铲斗摇臂的轻量化是一种对机身轻量化的有效方法,要提出一种新的结构设计方案,并对其进行改进,进而实现在新产品的细节设计,其技术革新与突破,以及独特的设计发展。
这种设计不仅有着非常大的实用价值,还有着非常高的原料价值,并且能够对其进行系统性的引导,对其提升产品的总体性能和品质,降低劣质材料的消耗具有很大帮助。
目前,国内外对斗轮堆垛器的具体设计大多是根据设计者的实际工作经验进行的,缺少系统化的理论指导,也缺少精确性。
为有效改变这种现状,可利用ANSYS的局部参数化程序APDL,建立斗轮式堆取器的数学模型,并在此基础上对其进行数值模拟。
大跨度门式斗轮堆取料机设计及结构计算分析门式斗轮堆取料机是一种高效的连续的散状物料运输设备,广泛适用于火力发电厂、冶金、焦化、矿山企业及港口散装物料储料场。
门式斗轮堆取料机因其具有整体稳定性好,回取率高,便于分类管理物料等优点,因此得到广泛应用。
门式斗轮堆取料机主要由金属结构、滚轮机构、大车行走机构、活动梁起升机构、尾车、尾车堆取变换机构、取料胶带机、堆取料胶带机、移动胶带机、配重机构、除尘系统、扶梯走台、供电装置、司机室、电气室、电气系统等组成。
MDQ1700/1500.60型门式斗轮堆取料机是长春发电设备总厂为山西柳林发电厂
设计制造的大型设备。
目前,60m跨距门式机结构为我国最大跨距结构。
本论文研究总体和机构的
设计、选型分析及金属结构的开发设计。
为了满足各机构的设计合理性,对各主要机构的驱动部分进行了综合对比,选取最适合于本工程的最优驱动方式。
为了满足设备运行所需的强度、刚度和稳定性要求,又能实现节约设计成本的目的,进行了初步计算及有限元分析。
第一步确定设备的整体形式,由于是门式斗轮堆取料机,金属结构采用门式结构,其中固定梁采用桁架结构,活动梁采用双工字梁及桁架混合结构形式,刚性门腿及柔性门腿采用箱形结构。
方案确定后,根据《技术协议》的设计输入,组织设计人员应用AutoCAD设计进行初步设计,然后进行手工初步计算及受力分析,更改初步设计方案,最后应用ALGOR设计软件,通过对金属结构图纸进行有限元建模、加载分析,得到金属结构在各个工况下的应力、变形情况及模态分析。
根据此计算结果对金属结构图纸进行最后优化设计,以使设备满足规范要求。
斗轮机堆取料机工作原理
嘿,朋友们!今天咱来聊聊斗轮机堆取料机那神奇的工作原理。
你看啊,这斗轮机堆取料机就像是一个勤劳的大力士,在那堆场上忙忙碌碌。
它有一个长长的臂架,就像大力士的手臂一样,可以伸展到好远好远的地方。
当它要堆料的时候,那可真是厉害啦!输送带就像一条欢快的小河流,源源不断地把物料送过来,然后通过那长长的臂架,把物料准确地堆放在指定的地方。
这就好比我们把东西整整齐齐地摆放在架子上一样,只不过斗轮机堆取料机的这个“架子”可大多了!
那取料的时候呢,也特别有意思。
它的斗轮就像是一个超级大勺子,在物料堆里挖呀挖呀,把物料挖起来,然后再通过输送带运走。
你说这像不像我们用勺子在锅里舀汤喝呀?哈哈!
而且啊,这个大家伙还特别灵活。
它可以根据需要调整自己的位置和角度,就像一个灵活的舞者在舞台上翩翩起舞一样。
它可以在堆场上自由地移动,这里堆一点,那里取一点,把整个堆场管理得井井有条。
你想想看,如果没有斗轮机堆取料机,那我们得费多大的力气去堆料和取料啊!它可真是帮了我们大忙了。
它就像是一个默默奉献的英雄,在背后为我们的生产和建设贡献着自己的力量。
它的工作效率那也是杠杠的!一会儿的功夫就能完成好多工作,让我们不得不佩服它的厉害。
它难道不是我们工业领域的一个宝贝吗?
总之啊,斗轮机堆取料机就是这么神奇,这么厉害!它让我们的工作变得更加轻松,更加高效。
让我们一起为这个了不起的大家伙点赞吧!
原创不易,请尊重原创,谢谢!。
DQ型斗轮堆取料机功能及主要构造1.1.1.1.1 功能。
1.1.1.1.2 DQ1000/1500.30悬臂式斗轮堆取料机(以下简称斗轮机),可以在-20℃~+41℃温度范围内,7级风以下连续进行堆、取煤(或其它轻比重散料)作业。
1.1.1.1.3 取煤时,由斗轮把堆积在料场上的煤挖取到悬臂胶带机上,再经输煤装置转运到下降折返尾车的系统胶带机输出到#3皮带上仓。
堆煤时,由系统胶带机经升起的折返尾车落入悬臂胶带机输出。
1.1.1.1.4 主要构造。
1.1.1.1.5 金属结构,主要金属结构采用16Mn钢焊接而成,其中前臂架、后臂架等为板梁结构,门柱、门座为箱梁结构。
1.1.1.1.6 斗轮及传动装置。
a)本装置主要由电动机、液力偶合器、斗轮轴、斗轮及溜料、导料装置等构成。
减速器为正交出轴行星传动,与电机、液力偶合器构成一体,通过胀套固定在斗轮轴上,减速器上装有杠杆式过力矩保护装置,当挖掘力超过设计值的1.5倍时,自动切断电机电路,实施过载保护。
减速器为进口硬齿面产品(德国FLENDER)。
减速器采用强制润滑方式,在减速器上设有润滑油泵。
当斗轮驱动电动机启动之前,首先启动润滑系统(设有压力检测开关),对润滑油泵进行保护,当润滑油泵停止工作时,油系统压力降低,检测开关与斗轮驱动电机联锁,切断电源,停止工作。
b)9个镶有斗齿的斗子用螺栓和销子固定在轮体上(斗齿可以更换)构成斗轮。
斗轮轮体为无格式结构。
c)为使物料在给定区域卸料,在斗轮的内侧设置园弧挡板,挡板表面衬有耐磨板;由斗轮挖取上来的物料,通过溜料槽导向悬臂胶带机。
d)物料滑动表面均衬有耐磨板,耐磨板都可更换。
1.1.1.1.7 拆卸和组装。
a)为便拆卸头部斗轮及斗轮传动装置时,不致引起上部机构失稳,必须将前臂架锁定,然后才能进行拆卸作业。
b)组装(胀套组装工艺)组装按拆卸相反顺序进行,组装时要充分注意不要混入灰尘和异物,并涂以油脂。
c)在斗轮轴上组装减速器,必须按下述工艺进行:1)胀套在未套到轴径上之前,切勿拧紧锁紧螺钉。