第六章 二自由度系统的振动分析
- 格式:ppt
- 大小:1.43 MB
- 文档页数:36

第六章 两自由度系统的振动§6.1 概述前一章介绍了单自由度系统的振动,它是振动理论的基础,有广泛的应用价值。
但在实际工程问题中,经常会遇到一些不能简化为单自由度系统的振动问题。
因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究方法有质的不同。
但从两自由度系统到多自由度系统的振动,无论从模型的简化、振动微分方程的建立和求解的一般方法,以及系统响应表现出来的振动特性等等,却没有什么本质上的区别,而主要是量上的差别。
因此研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度系统的振动系统。
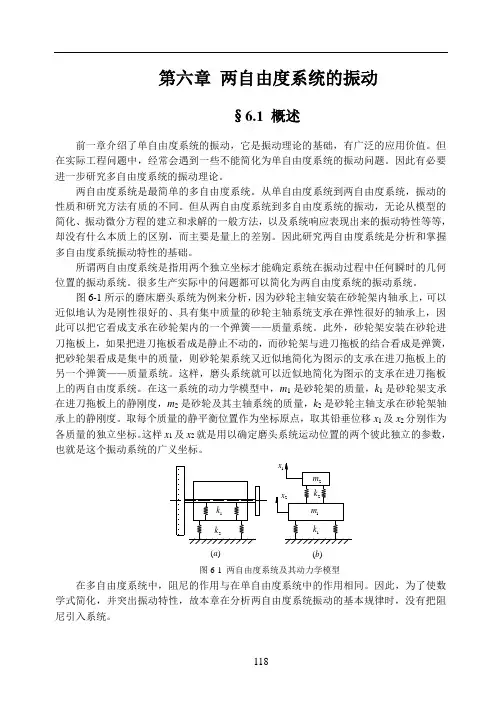
图6-1所示的磨床磨头系统为例来分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的、具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而砂轮架与进刀拖板的结合看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地简化为图示的支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m 1是砂轮架的质量,k 1是砂轮架支承在进刀拖板上的静刚度,m 2是砂轮及其主轴系统的质量,k 2是砂轮主轴支承在砂轮架轴承上的静刚度。
取每个质量的静平衡位置作为坐标原点,取其铅垂位移x 1及x 2分别作为各质量的独立坐标。
这样x 1及x 2就是用以确定磨头系统运动位置的两个彼此独立的参数,也就是这个振动系统的广义坐标。
1k 2k)(a )(b图6-1 两自由度系统及其动力学模型在多自由度系统中,阻尼的作用与在单自由度系统中的作用相同。
二自由度系统的振动1.概述在实际工程中,真正的单自由度振动是很少的,而是根据需要将被研究对象简化成单自由度系统来研究。
但是许多问题不能简化为单自由度系统,为满足工程精度上的需要,必须按多自由度系统来研究。
一般讲,三自由度以上的系统要得到闭合解是相当困难的。
在这种情况下,可以用坐标变换的方法,将描述实际问题的广义坐标用一组新的坐标来代替。
新坐标所描述的系统运动方程与实际系统是相同的,但用新坐标描述的系统微分方程之间已不存在耦合,称为各自独立的微分方程,就可以按单自由度系统的微分方程那样一一单独求解。
这种新坐标主坐标或模态坐标。
二自由度系统是最简单的多自由度振动系统,许多多自由度喜用的物理概念及解题思路可以从二自由度系统的分析中得到启迪,也是分析多自由度系统的基础。
二自由度振动系统的结构具有两个固有频率。
当系统按其中某一固有频率作自由振动时,称之为主振动。
主振动是简谐振动。
当发生主振动时,描述振动的两个独立变量与振幅之间有确定的比例关系,即两个振幅比决定了整个系统的振动形态,称之为主振型。
任意初始条件下的自由振动一般是这两个不同频率的主振动的叠加,其叠加后的振动不一定是简谐振动。
当外界激扰为简谐激扰时,系统对其响应是与激扰频率相同的简谐振动。
当激扰频率接近系统的任意一固有频率时,就会发生共振。
共振时的振型就是与固有频率相对应的主振型。
此时,喜用的两个振动的振幅都趋于最大值。
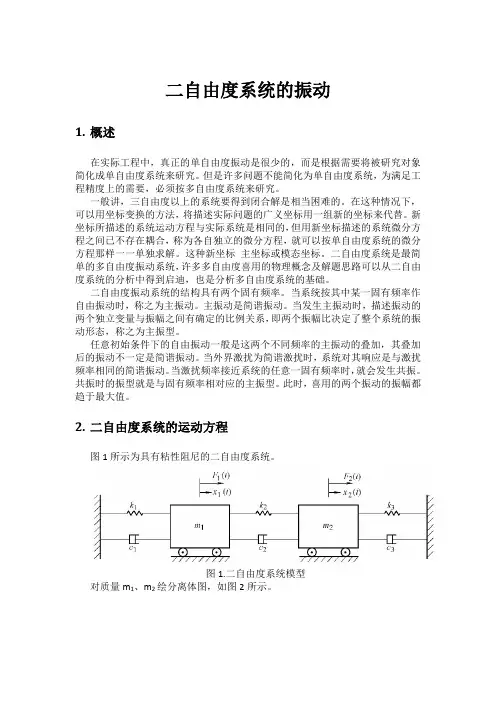
2.二自由度系统的运动方程图1所示为具有粘性阻尼的二自由度系统。
图1.二自由度系统模型对质量m1、m2绘分离体图,如图2所示。
图2.二自由度系统分析图用牛顿第二定律分别列分离体在水平方向方程得:整理得:由两个联立二阶常微分方程所描述的系统统称为二自由度系统。
上述方程可以方便的表示成矩阵形式。
常数矩阵[m]、[c]和[k]分别为质量、阻尼、刚度矩阵。
{x(t)}和{F(t)}分别称为二维位移向量和力向量。
可以将上述方程写成矩阵形式:对于同一系统当采用不同的独立坐标系来描述时,其[m]、[c]、[k]矩阵中的元素是不同的,但不影响系统的固有特性,系统的固有频率与坐标的选取无关,一定的系统固有频率是一定的。
![[整理]matlab二自由度系统振动.](https://uimg.taocdn.com/76298ee0c1c708a1284a4482.webp)
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析一、实验思想Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析固有频率取决于系统本身物理性质,而与初始条件无关。
对于二自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动1.建立二自由度系统振动模型1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)滑块质量分别为1.0 2.0滑块与机体滑动副的阻尼改为1.0E-0072.模型展示3.运动仿真结果设置x10=12经过Adams 运算后,滑块1、2 运动状态如图所示:4.matlab验证程序:k1=1000;k2=1000;k3=2000;m1=1;m2=2;a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;[x1x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')t1=0:0.01:2;;x1=subs(x1,'t',t1);x2=subs(x2,'t',t1);figureplot(t1,x1,'-');title('系统响应x(1)曲线');xlabel('时间/s');ylabel('位移/m');figureplot(t1,x2,'-');title('系统响应x(2)曲线');xlabel('时间/s');ylabel('位移/m');计算结果:5.结果分析存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。

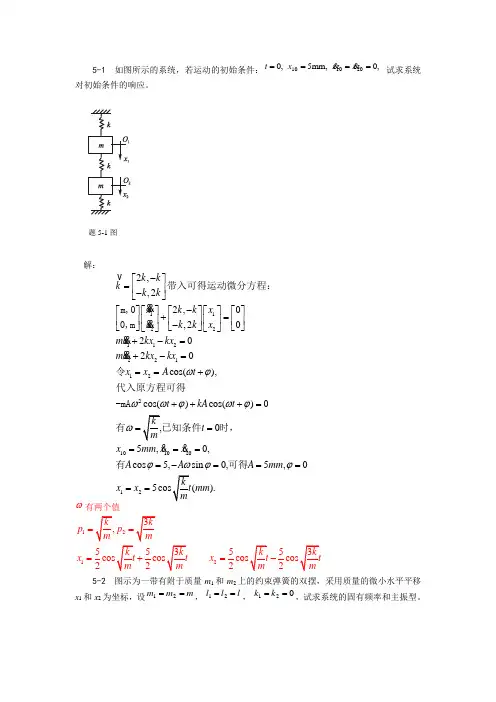
5-1 如图所示的系统,若运动的初始条件:,0,mm 5,0201010====x xx t 试求系统对初始条件的响应。
解:112211222112102,,22,0,202020cos(),cos()cos()005,k k k k k x x k k x k k x mx kx kx mx kx kx x x A t t kA t t x mm ωϕωωϕωϕω-⎡⎤=⎢⎥-⎣⎦-⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦+-=+-===++++====2带入可得运动微分方程:m,00,m 令代入原方程可得-mA 有时,1020120,cos 5,sin 0,5,0().x x A A A mm x x mm ϕωϕϕ===-=====有可得ω有两个值12p p ==15522x =+255c o c 22x =- 5-2 图示为一带有附于质量m 1和m 2上的约束弹簧的双摆,采用质量的微小水平平移 x 1和x 2为坐标,设m m m ==21,l l l ==21,021==k k ,试求系统的固有频率和主振型。
解:设1m 沿1x 方向移动1个单位,保持2m 不动,对2m ,1m 进行受力分析,可得:2122()0,m A kl m g =--=∑2212m g k l =-1112111212122111211112()()()0m B kk k l m m g m m m m m gk g k k g k l l l =-+-+=++=+-=++∑同理使2m 沿2x 方向移动一个单位,保持1m 不变,对2m 受力分析可得:22222()()*0m C kk l m g =--=∑,22222m g k k l =+;刚度矩阵为11211222,,k k k k ⎡⎤=⎢⎥⎣⎦k ,质量距阵12,00,m m ⎡⎤=⎢⎥⎣⎦m , 带入可得运动的微分方程为:mx kx F +=12,00,m m ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦+11211222,,k k k k ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦=F ;综上解得:⎪⎪⎪⎩⎪⎪⎪⎨⎧=⎪⎪⎭⎫⎝⎛++-=-⎪⎪⎭⎫ ⎝⎛++++)()(2222212222122212212111t F x l g m k x l g m x m t F x l gm x g l m g l m m k x m利用刚度影响系数法求刚度矩阵k 。
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析一、实验思想Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析固有频率取决于系统本身物理性质,而与初始条件无关。
对于二自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动1.建立二自由度系统振动模型1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)滑块质量分别为1.0 2.0滑块与机体滑动副的阻尼改为1.0E-0072.模型展示3.运动仿真结果设置x10=12经过Adams 运算后,滑块1、2 运动状态如图所示:4.matlab验证程序:k1=1000;k2=1000;k3=2000;m1=1;m2=2;a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;[x1x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')t1=0:0.01:2;;x1=subs(x1,'t',t1);x2=subs(x2,'t',t1);figureplot(t1,x1,'-');title('系统响应x(1)曲线');xlabel('时间/s');ylabel('位移/m');figureplot(t1,x2,'-');title('系统响应x(2)曲线');xlabel('时间/s');ylabel('位移/m');计算结果:5.结果分析存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。
《汽车振动分析与测试》第4讲二自由度振动在汽车工程中,振动分析与测试是非常重要的领域之一、振动不仅会影响车辆的行驶性能和乘坐舒适性,还会对车辆的寿命和安全性产生重要影响。
因此,对汽车振动进行分析和测试,对于改善车辆的设计和优化至关重要。
在汽车振动的研究中,二自由度振动是一个常见且重要的研究对象。
所谓二自由度振动,指的是系统具有两个自由度,即两个可以独立变化的振动模态。
这种振动模式一般情况下是分别与车辆的横向和纵向运动相关的两个振动模态。
对于二自由度振动系统,其振动特性可以通过求解其振动方程来进行分析。
振动方程可以用如下的形式表示:m1x1''+c1(x1'-x2')+k1(x1-x2)+f1(t)=0m2x2''+c2(x2'-x1')+k2(x2-x1)+f2(t)=0其中,m1和m2分别为两个质点的质量,x1和x2分别为两个质点的位移,c1和c2分别为两个质点之间的阻尼系数,k1和k2分别为两个质点之间的刚度系数,f1(t)和f2(t)分别表示外力对两个质点的作用。
由于存在两个自由度,所以振动方程是一个二阶微分方程。
求解振动方程,可以得到质点的位移响应和速度响应,从而了解系统在不同外力作用下的振动特性。
在振动测试中,我们可以通过使用加速度传感器和位移传感器来测量车辆的振动。
加速度传感器可以测量车辆在不同点上的加速度,而位移传感器可以测量车辆在不同点上的位移。
通过分析这些测量数据,我们可以得到车辆在不同工况下的振动特性,并进一步进行相关的优化和改进。
总之,振动分析与测试在汽车工程中具有重要的意义。
通过对汽车振动进行分析和测试,有助于我们了解车辆的振动特性,并对车辆的设计和优化提出合理的建议。
未来,随着汽车技术的不断发展,振动分析与测试也将不断进步和完善,为汽车行业的发展做出更大的贡献。