第四章(第2,3节) 两自由度系统的振动
- 格式:ppt
- 大小:1.37 MB
- 文档页数:23
![第4章 两自由度系统的振动 [兼容模式]](https://uimg.taocdn.com/aeb2f70903d8ce2f00662343.webp)
第四章 两自由度系统的振动前两章介绍了单自由度系统的振动,它是振动理论的基础,并有重要的应用价值。
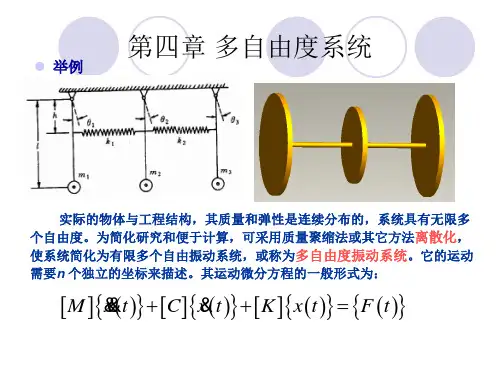
但工程中许多实际问题是不能简化为单自由度系统的振动问题,它们往往需要简化成为多自由度系统。
两自由度系统是最简单的多自由度系统,无论是模型的简化、振动微分方程的建立和求解的一般方法,以及系统响应表现出来的振动特性等等。
两自由度系统和多自由度系统没有本质上的差别,而主要是量上的差别,因此研究两自由度系统是分析多自由度系统振动特性的基础。
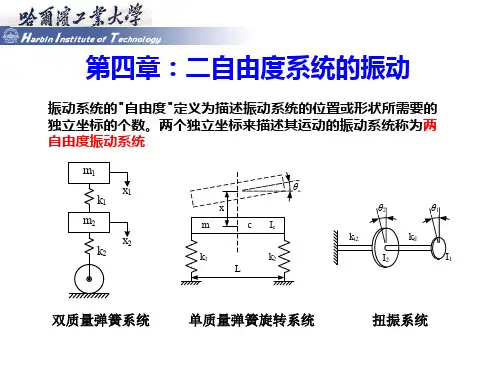
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
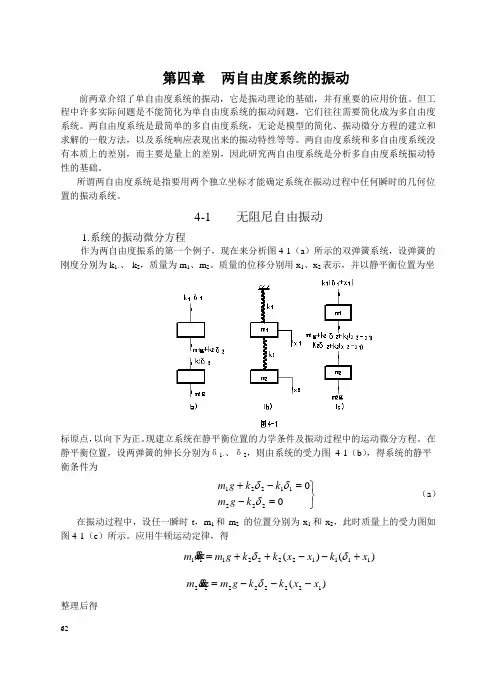
4-1 无阻尼自由振动1.系统的振动微分方程作为两自由度振系的第一个例子,现在来分析图4-1(a )所示的双弹簧系统,设弹簧的刚度分别为k 1、、 k 2,质量为m 1、m 2。
质量的位移分别用x 1、x 2表示,并以静平衡位置为坐标原点,以向下为正。
现建立系统在静平衡位置的力学条件及振动过程中的运动微分方程。
在静平衡位置,设两弹簧的伸长分别为δ1、、δ2,则由系统的受力图 4-1(b ),得系统的静平衡条件为⎭⎬⎫=-=-+0022211221δδδk g m k k g m (a )在振动过程中,设任一瞬时t ,m 1和m 2 的位置分别为x 1和x 2,此时质量上的受力图如图4-1(c )所示。
应用牛顿运动定律,得)()(11112222111x k x x k k g m x m +--++=δδ )(12222222x x k k g m xm ---=δ 整理后得222122222112212212111)(δδδk g m x k x k x m k k g m x k x k k xm -=-+-+=-++ } (b )将方程(b )的右端和方程(a)比较,就可以消去平衡项,于是得00)(1222222212111=-+=-++x k x k xm x k x k k xm } (4-1)令 ,/,/,/)(2222121m k c m k b m k k a ==+=则(4-1)式可改写成00122211=-+=-+cx cx xbx ax x } (4-2)这是联立的二阶常系数线性微分方程组。
两个自由度系统的振动理论曾凡林哈尔滨工业大学理论力学教研组本讲主要内容1、两个自由度系统的自由振动2、两个自由度系统的受迫振动1、两个自由度系统的自由振动(1)模型的简化同一物体的振动可以简化为不同的振动模型。
C研究上下平移振动研究前后颠簸振动两个自由度系统的自由振动模型112122222122()00mxk k x k x m x k x k x ++-=üý-+=þ&&&&2212121m k d m k c m k k b ==+=,,令方程变为:11221200xbx cx x dx dx +-=-+=&&&&,根据微分方程理论,可设上列方程组的解为:)sin()sin(21q w q w +=+=t B x t A x ,其中:A 、B 是振幅;ω为角频率,θ是初始相位角。
将上式代入微分方程组,得到:)sin()sin()sin(0)sin()sin()sin(22=+++++-=+-+++-q w q w q w w q w q w q w w t dB t dA t B t cB t bA t A 整理后得到:0)(0)(22=++-=--B d dA cB A b w w ,系统振动时,方程组具有非零解, 则方程组的系数行列式必须等于零,即:22=----ww d dc b —频率行列式①固有频率1、两个自由度系统的自由振动)()(24=-++-c b d d b w w 行列式展开后得到:—系统的本征方程,又称为频率方程21,22b d w +=m 2b d +=m i ω2的两个根都是实数,而且都是正数。
ii ω2的第一个根较小,称为第一固有频率。
iii ω2的第二个根较大,称为第二固有频率。
结论:两个自由度系统具有两个固有频率,这两个固有频率只与系统的质量和刚度等参数有关,而与振动的初始条件无关。
机械振动学总结 第一章 机械振动学基础第二节 机械振动的运动学概念第三节机械振动是种特殊形式的运动。
在这运动过程中,机械振动系统将围绕其平衡位置作往复运动。
从运动学的观点看,机械振动式研究机械系统的某些物理量在某一数值近旁随时间t 变化的规律。
用函数关系式来描述其运动。
如果运动的函数值,对于相差常数T 的不同时间有相同的数值,亦即可以用周期函数来表示,则这一个运动时周期运动。
其中T 的最小值叫做振动的周期,Tf 1=定义为振动的频率。
简谐振动式最简单的振动,也是最简单的周期运动。
一、简谐振动物体作简谐振动时,位移x 和时间t 的关系可用三角函数的表示为式中:A 为振幅,T 为周期,ϕ和ψ称为初相角。
如图所示的正弦波形表示了上式所描述的运动,角速度ω称为简谐振动的角频率简谐振动的速度和加速度就是位移表达式关于时间t 的一阶和二阶导数,即可见,若位移为简谐函数,其速度和加速度也是简谐函数,且具有相同的频率。
因此在物体运动前加速度是最早出现的量。
可以看出,简谐振动的加速度,其大小与位移成正比,而方向与位移相反,始终指向平衡位置。
这是简谐振动的重要特征。
在振动分析中,有时我们用旋转矢量来表示简谐振动。
图P6旋转矢量的模为振幅A ,角速度为角频率ω若用复数来表示,则有)sin()cos()(ψωψωψω+++==+t jA t A z Ae z t j用复指数形式描述简谐振动,给计算带来了很多方便。
因为复指数t j e ω对时间求导一次相当于在其前乘以ωj ,而每乘一次j ,相当于有初相角2π。
二.周期振动满足以下条件:1)函数在一个周期内连续或只有有限个间断点,且间断点上函数左右极限存在;2)在一个周期内,只有有限个极大和极小值。
则都可展成Fourier 级数的形式,若周期为T 的周期振动函数,则有式中22n n n b a A += nn n b a =ψt a n 三、简谐振动的合成一、同方向振动的合成1.俩个同频率的简谐振动)sin(222ψω+=t A x ,)sin(2222ψω+=t A x它们的合成运动也是该频率的简谐振动2.俩个不同频率振动的合成若21ωω≤,则合成运动为若21ωω≥ ,对于A A A ==21 ,则有上式可表示为二、两垂直方向振动的合成1.同频率振动的合成如果沿x 方向的运动为沿y 方向的运动为2不同频率振动的合成对于俩个不等的简谐运动它们的合成运动也能在矩形中画出各种曲线。