基于两步法的数码相机定位
- 格式:doc
- 大小:880.50 KB
- 文档页数:20

分析数码相机定位原理及其相关问题
了解数码相机定位原理,可以加深我们对这种产品的熟悉,用法起来越发得心应手。
特殊是从事这方面研制和开发的工程师,这些都是基础。
本文主要是分析数码相机定位原理,主要是深化分析它的标定的方式、定位的办法,如何利用电子实现光学影像和电子数据之间的转换。
数码相机工作原理
光芒通过镜头或者镜头组进入相机,通过成像元件(即CCD/传感芯片)按照光芒的不同转化为数字信号,数字信号通过影像运算芯片储存在存储设备中,也就是我们常说了相机自身的存储卡或者内存卡中。
它集成了影像信息的转换、存储和传输等部件,具有数字化存取模式,与电脑交互处理和实时拍摄等特点(数码相机成像原理)。
我们可以通过相机的屏幕也可以观察照片或者已经录制好的视频,也可以通过数据线(普通是)或者内存卡和电脑衔接,将数据或者视频数据传输到个人PC机上扫瞄。
数码相机定位原理
指用数码相机摄制物体的相片确定物体表面某些特征点的位置,通过定位,可以让图像越发清楚,和我们肉眼看到的影像对照显得越发真切可信。
在摄影测量学中有以下四个标定问题: 这些标定问题主要起源于高空摄影技术,是摄影测量中的经典问题.
(1)肯定定位:通过标定点确定两个坐标系在肯定坐标系统中的变换关系,或确定测距传感器在肯定坐标系中的位置和方向.
(2)相对定位:通过场景中的标定点投影确定两个摄象机之间的相对位置和方向.
(3)外部定位:通过场景中的标定点投影确定摄象机在肯定坐标系中的位置和方向.
(4)内部定位:确定摄象机内部几何参数,包括摄象机常数,主点的位置以及透镜变形的修正量.
第1页共2页。
基于两步法的数码相机定位摘要数码相机定位在机器自动装配系统、工业视觉检测与识别、三维重建、机器人视觉导航、运动分析、海上目标跟踪、交通监管(电子警察)等诸多领域中得到了运用。
本文给出了确定靶标上圆的圆心在该相机像平面的像坐标的数学模型及确定两部固定相机相对位置的数学模型,并设计出了相应的求解算法。
首先在仅考虑单相机的情况下,在分析相机成像原理和四个坐标系之间的相互变换关系的基础上,考虑了相机径向畸变和切向畸变即非线性畸变因素,选择了一种简化模型,克服了相机内外参数未知情况下求解像坐标的困难,最终建立了基于两步法的像坐标确定模型。
该模型满足牛顿迭代法的收敛条件,保证了模型解的稳定性。
其次利用该模型,针对问题1和问题2,借助于Matlab工具,计算了靶标上给定5个圆的圆心像坐标。
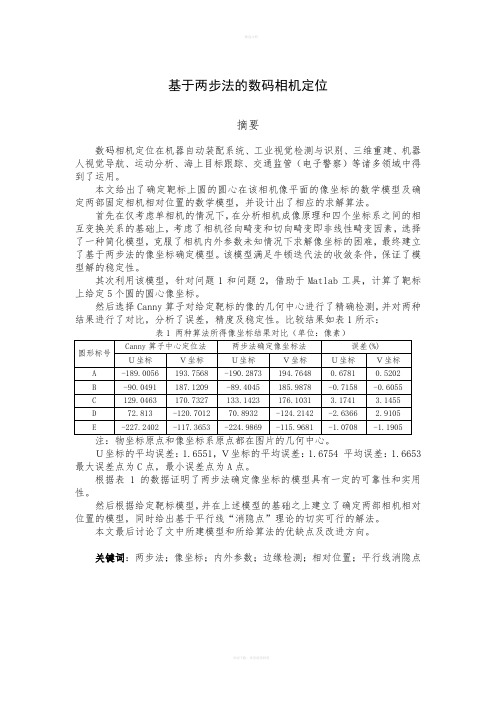
然后选择Canny算子对给定靶标的像的几何中心进行了精确检测,并对两种结果进行了对比,分析了误差,精度及稳定性。
比较结果如表1所示:U坐标的平均误差:1.6551,V坐标的平均误差:1.6754 平均误差:1.6653最大误差点为C点,最小误差点为A点。
根据表1的数据证明了两步法确定像坐标的模型具有一定的可靠性和实用性。
然后根据给定靶标模型,并在上述模型的基础之上建立了确定两部相机相对位置的模型,同时给出基于平行线“消隐点”理论的切实可行的解法。
本文最后讨论了文中所建模型和所给算法的优缺点及改进方向。
关键词:两步法;像坐标;内外参数;边缘检测;相对位置;平行线消隐点一、问题的提出1.1 背景说明数码相机定位在交通监管(电子警察)等方面有广泛的应用。
由于目前数字图像的处理速度越来越快,且可达0.02个像素精度[1],因此考虑畸变系统误差的高精度标定具有重要的意义。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括、电子、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写):我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):参赛队员 (打印并签名) :1.2.3.指导教师或指导教师组负责人 (打印并签名):日期:年月日赛区评阅编号(由赛区组委会评阅前进行编号):高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):摘要:本文针对双目定位的数码相机相对位置的标定问题进行了深入研究。
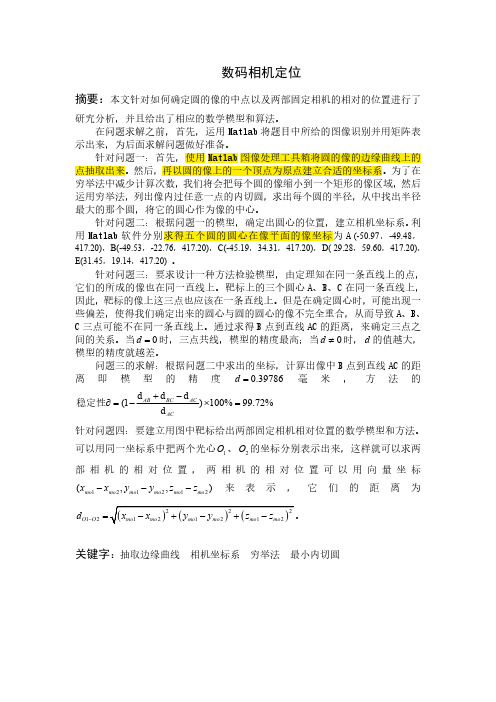
对于问题一,建立了世界坐标系和相机成像坐标系之间的转换矩阵,可以根据相机与靶面任意的相对位置关系求得靶标圆心的像坐标;对于问题二,针对所给靶标的特征提出了质心模型、切线模型、解析法模型三种求靶标圆心在像坐标投影点的模型,并就所给的靶标相片求出了圆心投影的像坐标。
对于问题三,应用了问题一中转换矩阵,建立了判定问题二中模型优劣的仿真算法,对问题二中提出的三种模型进行了优劣分析。
对于问题四,应用Roger Y. Tsai 的单部相机部和外部参数的标定算法,不用求解多元非线性方程组,直接用最小二乘法求解超定线性方程组,即可求得相机坐标系的变换矩阵和像距,从而能够确定两相机的相对方位和位置关系。
本文得到的主要结论如下: 问题一:求解靶标圆心像坐标的算法为世界坐标系和相机成像坐标系之间的坐标变换;问题二:利用三种模型得出问题所给靶标相片中靶标圆心投影位置的像坐标,如下表所示;问题三:在像平面和物平面夹角不是很大的情况下,三种模型的精度相差不大;像平面和物平面夹角比较大时,切线模型的精度大于解析法模型,质心模型的精度最差。
数码相机定位摘要系统标定是双目定位的关键,其在交通监管(电子警察)等方面具有重要作用。
我们分别建立了针孔模型和矩阵模型,通过Matlab软件进行求解,确定了像点的坐标与相机的相对位置,从而解决了系统标定问题。
针对问题一,由于需要求坐标,所以我们建立了四个本文会用到的坐标系,并求出了四个坐标系间的转化关系式。
我们根据相机成像的原理,建立了针孔模型,通过使用Matlab软件对圆的像作外切矩形并得出切点坐标,利用切点与圆心坐标间的关系式确定出了圆心像的像素坐标。
最后通过像心与光心坐标系之间的转换关系得出了圆心像的光心坐标。
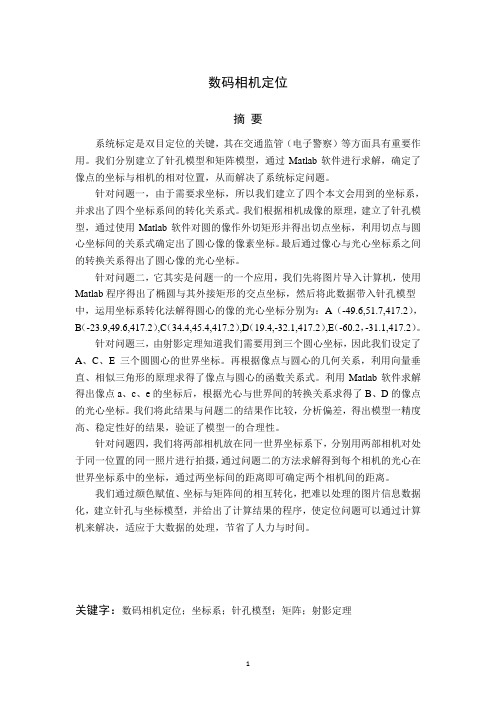
针对问题二,它其实是问题一的一个应用,我们先将图片导入计算机,使用Matlab程序得出了椭圆与其外接矩形的交点坐标,然后将此数据带入针孔模型中,运用坐标系转化法解得圆心的像的光心坐标分别为:A(-49.6,51.7,417.2),B(-23.9,49.6,417.2),C(34.4,45.4,417.2),D(19.4,-32.1,417.2),E(-60.2,-31.1,417.2)。
针对问题三,由射影定理知道我们需要用到三个圆心坐标,因此我们设定了A、C、E三个圆圆心的世界坐标。
再根据像点与圆心的几何关系,利用向量垂直、相似三角形的原理求得了像点与圆心的函数关系式。
利用Matlab软件求解得出像点a、c、e的坐标后,根据光心与世界间的转换关系求得了B、D的像点的光心坐标。
我们将此结果与问题二的结果作比较,分析偏差,得出模型一精度高、稳定性好的结果,验证了模型一的合理性。
针对问题四,我们将两部相机放在同一世界坐标系下,分别用两部相机对处于同一位置的同一照片进行拍摄,通过问题二的方法求解得到每个相机的光心在世界坐标系中的坐标,通过两坐标间的距离即可确定两个相机间的距离。
我们通过颜色赋值、坐标与矩阵间的相互转化,把难以处理的图片信息数据化,建立针孔与坐标模型,并给出了计算结果的程序,使定位问题可以通过计算机来解决,适应于大数据的处理,节省了人力与时间。
数码相机相对位置定位方法1.摘要本文给出了空间中两部固定照相机相对位置的标定方法,将照相机成像过程近似为针孔成像过程,使得成像过程中光学中心—像点—物点三点共线,实现了成像的非线性到线性的简化。
文中将标定两部相机相对位置的方法分成三个步骤:第一步,将针孔成像抽象为点投影式映射的过程,根据射影几何中“点线结合的不变性”,具体通过射影前后任意两圆的公切线与圆的切点的唯一性,并且运用“标靶像坐标得切点切线算法”对所给像图片进行操作,求得切点的坐标,每对切点连线的交点即为圆心的像。
求得的结果如下表:点 A B C D E坐标(-194,-193,1577) (-97,-186,1577) (119,-169,1577) (67,113,1577) (-226,114,1577)(单位:像素)第二步,依靠成像过程光学中心—像点—物点三点共线的性质,用已知的像点坐标去标定对应的标靶圆心的坐标,再利用标靶上各点的几何关系,对待定系数进行求解,从而得到标靶圆心坐标;第三步,在已知标靶圆心在两个相机坐标系中的坐标的前提下,利用这些坐标求出坐标系变换矩阵。
再利用求出的变换矩阵求出一部相机在另一相机坐标系中的坐标,这样就可以求出两个相机的相对位置。
此外,根据投影过程中“共线不变性”和“交比不变性”对模型中的第一个步骤的结果进行评价,并对这两种方法的准确性和稳定性进行讨论,其中设计了恰当的算法对方法二进行了全面的评定,得出方法一具有局限性而方法二具有良好得准确性和稳定的结果。
在模型扩展中,我们建立了考虑畸变的非线性模型。
分析了理想像点坐标和实际有畸变的像点坐标之间的函数关系,从而提出了将非线性模型问题转换到线性模型下解决的方案。
关键词:照相机定位针孔模型射影变换交比坐标变换目录数码相机相对位置定位方法 (1)1.摘要 (1)2.问题重述 (3)3.问题分析 (3)4.模型假设 (3)5.符号说明 (4)6.模型建立与求解 (4)1)模型准备: (4)2)模型建立 (4)3)对问题一的解答: (6)a)问题分析: (6)b)算法:标靶像坐标的切线切点算法 (6)c)改进算法:基于罚函数思想的切点切线算法 (7)d)算法分析: (7)4)对问题二的回答: (7)5)求解标靶圆心在照相机坐标系下的坐标 (8)a)问题分析: (8)b)求解方法: (8)6)利用空间坐标变换法确定两部照相机的相对位置: (10)a)问题分析: (11)b)求解过程: (11)7.模型分析及检验 (12)1)对问题三的回答: (12)a)方法一:利用共线不变性对结果的检验 (12)b)方法二:基于射影变换交比不变性的检验方法 (13)2)模型分析 (16)8.模型拓展 (16)9.参考文献 (17)10.附录 (18)2.问题重述题目要求根据标靶的像和标靶进行对系统的标顶,最终找到两台照相机的相对位置。
数码相机定位模型分析摘 要在交通监管中,要定位物体上一个特征点,需用两部固定于不同位置的相机拍摄得到物体的像,分别获得在两部相机平面上的坐标。
只要知道两部相机的精确的相对位置,就可以用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,也就确定了特征点的位置。
所以,进行数码相机的标定就是一项非常重要的工作,本文针对数码相机的标定问题,进行以下的研究工作。
1、根据数码相机成像原理,结合数字摄影测量学的有关内容,分别建立物方坐标系、图像坐标系、光心坐标系和辅助坐标系,定义拍摄照片的内、外方位元素,利用像点的空间直角坐标变换与中心投影构像方程,结合单像空间后方交会的有关概念,列出空间后方交会的误差方程式与法方程式,建立空间图像坐标的解算模型。
2、根据照片的像素以及各标志点所处的位置,利用基于几何特性的椭圆中心像坐标的快速求取方法,初步定出各标志点的中心图像坐标。
在建立的物方坐标系内,读出特征点的实际坐标,将相关数据引入前述模型中,采用非线性最小二乘法进行求解。
经11次迭代,求算的各点图像坐标为(单位:mm ): (18.7685,19.1054A A x y =−=)(8.5091,B x =−18.0789B y =)(12.3984,C x = 16.1065C y =)( 6.6438,11.1209D D x y ==−)(21.8276,11.6190E E x y =−=−)3、针对模型的精度问题,利用三点共线原理,将光心、特征点的坐标转换至物方坐标系内,并分别计算光心与各特征点连线在物方坐标系)(xoy 平面内的投影,反推各特征点的解算坐标,以解算坐标及实际坐标求算点误差距离,以误差距离平均值作为精度的评判指标,设计出精度评判方法。
引入一般数学问题不定性分析方法,结合各标志点初始图像坐标的变化对求解结果的影响,分析该算法的稳定性,得出在特定靶位的条件下,算法基本上能够保证稳定的结论。
4、建立光心坐标系与物方坐标系的的转换模型,求解两部相机光心坐标在物方坐标系内坐标,并利用三点共面原理建立确定两部相机相对位置的具体方法,从坐标及像平面夹角等几个方面给出相对位置的表达式。
数码相机定位数学模型数码相机定位第七组:李晨辉,姚晓红,孙娅摘要本文根据题意,在建立数学模型之前进行照相机成像原理的模型简化,将照相机复杂的成像过程看作简便的小孔成像过程。
世界坐标和像坐标之间的互相转化是本文主要的思想主线。
针对第一个问题,本文建立了简单易懂的小孔成像原理的数学模型。
本文将物体看作是无数特征点的集合,将特征点在建立的世界坐标中的坐标转换为物体在相机成像后的平面坐标,即像平面坐标。
通过旋转矩阵和平移矩阵等种种运算方式实现以上所述坐标的转换。
本文给出了确定像坐标的公式。
第二个问题是实际运算,首先通过RAC两步法求得数据,又根据重心法测得了实际的数据,本文进行了数据对比,判别了算法的正确性,结果偏移量的微小(点偏移量:A为0.020891;B为0.03088;C为0.068728;D为0.179126;E为0.013284;F为0.0058 G0.048;H为0.0714)说明我们算法较为准确,模型合理。
第三个问题我们运用了特殊点法,将二问中所得坐标与切线所得特殊点坐标进行对比校正,结果差距同样微小,本文以此分别验证了模型的稳定性和精确度。
而针对第四个问题,我们运用所建立的模型逆向转换,用物体在两台相机中的成像的不同数据确定了双目的位置。
总体上,本文主要进行了实际物体的世界坐标与它在相机里成像为平面图像的相机坐标之间的转换,相机平面坐标与其3D坐标之间的转换,相机3D坐标和世界坐标之间的互相转换。
这些转换是数码相机定位的关键。
关键字:小孔成像坐标变换 RAC两步法计算机扫描畸变因素1一、问题重述数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
如果知道两部相机精确的相对位置,用几何的方法得到特征点在固定一部相机中的坐标,即确定了特征点的位置.因此此题的重点如何精确的确定两部相机的相对位置.此过程为为系统标定. 标定的一种做法:在一块平板上画若干个点,用双目定位,利用这两组像点的几何关系得到两部相机的相对位置,然而没有几何尺寸的点在像平面与物平面是无法直接得到的,实际上用有几何尺寸的圆代替点(圆为靶标),圆心就是几何的点了,但由于镜像这些圆会发生变形,因此标定是将这些圆的圆心的像精确的找到。
数码相机定位的数学模型摘要随着数码相机定位在各领域的广泛应用,对相关问题《机器视觉》的研究也成为热点。
因此建立一个精度较高,稳定性好的数码相机定位的数学模型,具有很好的现实意义。
问题1要求给出确定靶标上圆的圆心在给定相机像平面的像坐标的算法,问题2利用问题1的模型对给定数据求解。
为此,首先建立了四个空间直角坐标系,在MATLAB中把图3的数字信息提取出来,主要是五个椭圆的边缘点的信息;同时为了便于运算,通过坐标变换将计算机图像坐标变换为图像坐标;并用提取的图像边界坐标拟合出5个椭圆的方程,利用“曲线切线的投影仍与曲线的投影相切,而且切点的投影仍为投影的切点”这一引理,提取出靶标上圆及其像上的公切点的坐标作为特征点,利用RAC两步法标定过程和最小二乘法建立了计算世界坐标系到相机坐标系的旋转变换矩阵R和平移向量T及径向畸变系数k的算法。
利用16个公切点作为特征点,通过Matalb编程求得靶标上圆的圆心在文中给定相机像平面的五个坐标(单位:mm):A(-49.7132, 51.1289 417.1958),B(-23.3475, 49.1539 417.1958),C(33.8194, 44.8716, 417.1958),D(18.8173,-31.5798, 417.1958),E(-59.7830, -31.1754, 417.1958)。
问题3的解决分为两步:一是通过对模型计算出的焦距及畸变系数及上面五个坐标值的分析得出模型的精度较高的结论;二是采用改变特征点数的方法或利用“A,B,C三个标靶的中心的像应在一条直线上”验证模型的稳定性。
问题4采用二目立体视觉模型确定了给出两部固定相机相对位置的数学模型和方法。
本文建立的算法可操作性强,精度较高,稳定性好,对解决类似问题的计算有一定的推广价值。
关键词:拟合椭圆特征点提取RAC两步法坐标旋转矩阵公切点数码相机定位的数学模型一问题的提出数码相机定位的数学模型来源于2008年全国大学生数学建模竞赛的A题。
基于两步法的数码相机定位基于两步法的数码相机定位摘要数码相机定位在机器自动装配系统、工业视觉检测与识别、三维重建、机器人视觉导航、运动分析、海上目标跟踪、交通监管(电子警察)等诸多领域中得到了运用。
本文给出了确定靶标上圆的圆心在该相机像平面的像坐标的数学模型及确定两部固定相机相对位置的数学模型,并设计出了相应的求解算法。
首先在仅考虑单相机的情况下,在分析相机成像原理和四个坐标系之间的相互变换关系的基础上,考虑了相机径向畸变和切向畸变即非线性畸变因素,选择了一种简化模型,克服了相机内外参数未知情况下求解像坐标的困难,最终建立了基于两步法的像坐标确定模型。
该模型满足牛顿迭代法的收敛条件,保证了模型解的稳定性。
其次利用该模型,针对问题1和问题2,借助于Matlab工具,计算了靶标上给定5个圆的圆心像坐标。
然后选择Canny算子对给定靶标的像的几何中心进行了精确检测,并对两种结果进行了对比,分析了误差,精度及稳定性。
比较结果如表1所示:表1 两种算法所得像坐标结果对比(单位:像素)U坐标的平均误差:1.6551,V坐标的平均误差:1.6754 平均误差:1.6653 最大误差点为C点,最小误差点为A点。
根据表1的数据证明了两步法确定像坐标的模型具有一定的可靠性和实用性。
然后根据给定靶标模型,并在上述模型的基础之上建立了确定两部相机相对位置的模型,同时给出基于平行线“消隐点”理论的切实可行的解法。
本文最后讨论了文中所建模型和所给算法的优缺点及改进方向。
关键词:两步法;像坐标;内外参数;边缘检测;相对位置;平行线消隐点一、问题的提出1.1 背景说明数码相机定位在交通监管(电子警察)等方面有广泛的应用。
由于目前数字图像的处理速度越来越快,且可达0.02个像素精度[1],因此考虑畸变系统误差的高精度标定具有重要的意义。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
本文是通过确定数码照相机的位置,属性参数并建立成像模型,从而确定空间坐标系中物点同它在图像平面上像点之间的对应关系,并通过对所得到的结果进行相关的处理,最终得到其在像平面理想的像坐标。
1.2 重述有人设计靶标如下A,取1个边长为100mm的正方形,分别以四个顶点(对应为A、C、D、E)为圆心,12mm为半径作圆。
以C边上距离A点30mm处的B为圆心,12mm为半径作圆,如下图1所示。
图1靶标示意图由于图形的图像与拍摄点的位置有关,所以一下得到用一位置固定的数码相机摄得其像,如图2所示。
图2 靶标的像问题1:建立数学模型和算法以确定靶标上圆的圆心在该相机像平面的像坐标,这里坐标系原点取在该相机的光心,x-y 平面平行于像平面;问题2:对由图1、图2分别给出的靶标及其像,计算靶标上圆的圆心在像平面上的像坐标,该相机的像距(即光心到像平面的距离)是1577个像素单位(1毫米约为3.78个像素单位),相机分辨率为1024×768;问题3:设计一种方法检验你们的模型,并对方法的精度和稳定性进行讨论; 问题4:建立用此靶标给出两部固定相机相对位置的数学模型和方法。
二、 模型假设及符号说明2.1 模型假设:1)假设相机坐标平面与成像坐标平面平行;2)假设相机坐标系原点在成像平面的投影是像坐标的原点; 3)假设噪声对相机成像无影响; 2.2 主要符号说明:1)w w w w O X Y Z -:全局坐标系; 2)o UV -:像素坐标系; 3)d d d o x y -:物理坐标系; 4)c c c c o x y z -:数码照相机坐标系;5)(),x u u x y δ:理想坐标点(),u u x y 在x 轴上的畸变量; 6)(),y u u x y δ:理想坐标点(),u u x y 在y 轴上的畸变量; 7)f :相机的焦距;注:其它所有符号在文中引用处有详细说明。
三、 问题的分析通常,为了通过物坐标求取像坐标,需知道相机的内外参数,求取内外参数的过程本质就是相机的标定。
一般相机的标定方法都采用张氏法标定,该方法能高精度地标定相机,且简便易行,可以说是相机标定方法的代表,但其算法模型仅考虑了镜头径向畸变,其对切向畸变较大的场合,如鱼眼镜头成像,则不适用。
且该算法要求一个比较好的初值,若初值选择不当,则算法难以收敛或只能收敛到局部最小,从而大大降低标定精度。
为了克服计算相机内外参数的困难,提出了一种基于两步法的确定像坐标模型。
首先采用一种简化的线性模型估算出像中心的近似位置,并利用该像中心点求取初值,由于该近似点畸变很小,故求取的初值能很好地逼近准确值,然后采用一种基于牛顿迭代法得到较为精确的像坐标。
相机在使用阶段其内部参数是基本保持不变的,但两台相机之间的相互位置可能会因不慎磕碰而改变,这样势必会影响测量精度。
为了避免在重新确定两台相机之间的相互位置关系时要重新对相机进行标定,本文建立了仅利用空间点在两台相机像面上的坐标即可获得它们之间的相互关系的模型,给出了基于平行线消隐点理论算法。
四、 确定像坐标模型的建立和求解4.1 数码照相机模型如图3所示:在模板平面上,先分别以两条正交的直线为xy 轴,并按右手定则建立全局坐标系w w w w O X Y Z -;然后以数码照相机透视中心c o 为坐标原点,并使其x 轴和y 轴分别平行于像面坐标系的x 轴和y 轴,且方向相同,z 轴为数码照相机镜头的主光轴,按右手定则建立数码照相机坐标系c c c c o x y z -;再以像平面上像素坐标值()0,0的点为坐标原点o ,以水平像元阵列方向为x 方向,以垂直像元阵列方向为y 方向,建立像素平面坐标系o UV -;最后以主光轴与像平面的交点为坐标原点,并使坐标轴分别平行于像素坐标系的坐标轴来建立物理坐标系d d d o x y -。
模板平面上w P 的理想成像点为u P ,而实际透视畸变后的成像点为d P 。
w图3 透视投影模型4.2 理想透视模型通过数码照相机采集的数字图像,每幅数字图像在计算机内为m n ⨯数组,m 行n 列的图像中的每一个元素我们称之为像素,其数值即为图像点的亮度。
再根据针孔成像原理,由世界坐标点到理想像素点的齐次变换如下:[]11w w wx U y s V F R T z ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(1) 其中,F 为内参矩阵,[],R T 为数码照相机的外参矩阵,R 和T 分别为模板相对数码照相机的旋转分量和平移分量。
其分别定义如下[2]:1,11,21,31,42,12,22,32,43,13,23,33,40, , 01xx y y f C r r r r F f C R r r r T r r r r r ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦其中,x y f f 分别表示在x 方向和y 方向上像点的物理坐标到图像坐标的比例系数;,x y C C 表示主光轴与像平面交点的图像坐标。
由于全局坐标系的xy 轴在模板平面上,因此对于模板上的点,0w z =,这样式(1)可重写为:1,11,21,42,12,22,43,13,23,4001011xx w y y w U f C r r r x s V f C r r r y r r r ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ (2)消去s 即得到以下理想透视数学模型:()()1,11,21,43,13,23,42,12,22,43,13,23,4x w w x w w x w w y w w f r x r y r U C r x r y r f r x r y r V C r x r y r ⎧++=+⎪++⎪⎨++⎪=+⎪++⎩(3)4.3 实际成像模型理想的透镜成像是针孔成像,其物与像满足相似三角形关系,而实际的透镜并不满足这个条件(如图3所示)。
由于数码照相机光学系统存在加工误差和装配误差,因此物点在数码照相机像面上实际所成的像与理想成像之间主要存在径向畸变和切向畸变两种光学畸变误差。
为此,本文主要考虑镜头径向畸变和切向畸变。
设理想成像点的物理坐标为(),u u x y ,畸变后的物理坐标为(),d d x y ,理想成像点的物理坐标(),u u x y 与对应的世界坐标点(),,0w w x y 有如下关系:1,11,21,43,13,23,42,12,22,43,13,23,4w w u w w w w u w w r x r y r x r x r y rr x r y r y r x r y r ++⎧=⎪++⎪⎨++⎪=⎪++⎩(4)其中f 为相机焦距,,u v 分别是物距和相距,ds 像素点大小(mm/像素)。
由文献[3],可建立如下总像差模型:()()()()()()2422123424221234,32,23x u u u u u u u y u u u u u u ux y x k k k x y k x y x y y k k k x y k x y δρρδρρ⎧=++++⎪⎨=++++⎪⎩(5) 12,k k ρ=为径向畸变系数,34,k k 为切向畸变系数。
由理想物理坐标到实际物理坐标的关系如下:()(), , ,d u x u u d u y u u x x x y y y x y δδ=+=+由实际物理坐标到实际像点()ˆˆ,UV 的关系为: ˆˆx d xy d yU f x C V f y C ⎧=+⎪⎨=+⎪⎩ (6)综合式(4)式(6)即得到如下实际像坐标计算公式:()()ˆ,ˆ,x u x x u u xy u y y u u yU f x f x y C V f y f x y C δδ⎧=++⎪⎨=++⎪⎩ (7)()(),,,,,u u x u u y u u x y x y x y δδ可分别由式(4)、式(5)确定。
其中对于数码照相机的每一个位置,其外部参数就有6个;内部参数有,,,x y x y f f C C 以及畸变系数。
通过假设像素坐标的原点对应全局坐标系的原点,像素点为正方形,相机的焦距()f u v +的理想情形下,得到简化的线性模型[4],像坐标的初始值有如下关系:ˆˆ()w w x U f y u v ds V ⎡⎤⎡⎤=⎢⎥⎢⎥+⎣⎦⎢⎥⎣⎦(8)求取相机内外部参数可参见文献[3]。