数模获奖论文(数码相机定位问题)
- 格式:ppt
- 大小:538.50 KB
- 文档页数:3

2008年全国大学生数学建模竞赛A题全国一等奖论文数码相机定位摘要本文通过对数码相机的靶标和像平面相互之间关系的分析,利用选取相关对应点和坐标转换的方法,确定靶标圆心在像平面的投影位置,进而完成了系统标定模型,解决了相机的单目定位问题。
对于问题1,为确定靶标上圆的圆心在一个相机像平面的像坐标,需要得到相机像平面中点与靶标上点的对应关系。
通过将相机外部参数和内部参数联立可以建立模型1。
对于问题2,内部参数通过焦距可以得到,而外部参数的获得则需要事先确定一组特殊点。
由于靶标上两条线的交点在像平面上的投影点即为这两条线在像平面上的投影图线的交点,因此我们首先对图像进行边缘提取和椭圆拟合,然后利用程序选择靶标上A 、C 两个圆的外公共切线的切点作为特殊点。
将对应特殊点带入(1)式,就可以求得外部参数。
最后利用几何关系得出靶标上圆心的坐标,带入得到它们在该相机像平面的坐标。
结果为:vA O (-4.4324,-6.7785,0)、vB O (-2.3,-6.4456,0)、vC O (3.39,-5.9757,0)、vD O (-4.5471,3.7096,0)、vE O (2.1965,3.2275,0)。
见图3。
对于问题3,为了检验模型,本文通过计算机模拟数据,可以得到一个内外参数都已知的图像。
进而可以确定这四个顶点在像平面的准确坐标。
根据(1)式可以得到这四个顶点的计算坐标,把计算坐标与准确坐标的距离为对角线的矩形面积称为误差面积,误差率=误差面积/相纸面积。
计算误差率分别为:0.017591%、0.01777%、0.01532%、0.01557%。
从而可知用此模型精确度高,稳定性强。
对于问题4,类似于问题3,进行计算机模拟,得到空间两不同角度拍摄图像,进而得到在此数码相机坐标系下的特殊点坐标。
由于在求像坐标时考虑到了数码相机的透视效应,也就是内部参数,而两个数码相机的空间位置关系仅仅是外部参数的关系,因此可以求得仅考虑外部参数时两个像平面上的坐标,进而做差求出两个数码相机的相对位置坐标。

数码相机定位模型(题目)摘要此处为摘要正文一定要写好。
主要写三个方面:1. 解决什么问题(一句话)2. 采取什么方法(引起阅卷老师的注意,不能太粗,也不能太细)3. 得到什么结果(简明扼要、生动、公式要简单、必要时可采用小图表)关键词:差分近似,误差补偿算法,Simpson积分公式3-5关键词即可目录1.问题重述 .............................................................................................................. 错误!未定义书签。
2.模型假设 .............................................................................................................. 错误!未定义书签。
3.符号说明 .............................................................................................................. 错误!未定义书签。
……………………………说明:目录页可以没有,如果内容比较多,可以有目录页一问题重述二问题分析三模型假定四问题分析五模型建立与求解六模型检验七模型评价八模型推广结合社会实际问题九参考文献[1] 吕显瑞等,数学建模竞赛辅导教材,长春:吉林大学出版社,2002。
[2] 刘来福,曾文艺,数学模型与数学建模北京:北京师范大学出版社,1997。
[3] 陈如栋,于延荣,数学模型与数学建模,北京:国防工业出版社,2006。
[4] 姜启源,谢金星,叶俊,数学模型(第三版),北京:高等教育出版社,2003。
[5] 梁炼,数学建模。
华东理工大学大学出版社 2005.3。
[6] 周义仓,赫孝良,西安交通大学出版社,1998.8。

具有仿射不变性的几何结构在相机定位中的应用摘要本文采用小孔成像的模型研究相机成像问题。
基于靶平面上的点与像平面上的点一一对应,本文研究了几种几何结构。
发现靶平面上两个圆的内公切线交点与两个圆心共线这种几何结构仿射到像平面上依然成立,即两个圆心和内公切线交点在像平面上的3个像点共线,并证明了这一结论。
本文提出一种运用0-1矩阵求公切线的算法,但在实际操作时采用作图法。
运用作图法可以在像平面上确定两个椭圆的内公切线交点,该交点为靶平面上两个圆的内公切线交点在像平面上所成的像。
靶平面上5个圆可以确定10个内公切线交点,这样用作图法就可以确定靶平面上10个内公切线交点在像平面上的10个像点。
在像平面上建立坐标,每个靶平面上的圆心的像用两个未知量表示,共有10个未知量。
根据已证明的结论可知,对于每个内公切线交点在像平面上的像点,都有相对应的两个圆心的像点与之共线,就可以得到共线所满足的方程。
10个内公切线交点的像点对应10个2次方程,10个未知量就可求出。
靶平面上的圆心的像就可以确定。
本文采用牛顿迭代法对2次方程组进行求解。
并研究了解的稳定性。
为了得到两部固定相机的相对位置,建立了2个像平面坐标系、2个相机坐标系和1个三维世界坐标系。
本文采用最小二乘法确定相机坐标系与三维世界坐标系的关系。
在具体算法中,并没有利用所求出来的靶平面上圆心以及它的像点的坐标求解,而是采用10个内公切线交点及其像点的坐标求解,这是因为圆心的像点是由内公切线交点的像点求出的,误差更大。
分别确定2个相机坐标系与三维世界坐标系的关系之后,就可以确定2个相机坐标系之间的关系。
最后,本文对模型进行了分析,对一些方法的精度进行了讨论。
关键词相机定位仿射不变性内公切线交点1 问题分析双目定位是用两部相机给物体拍照来定位。
对于物体上的一个特征点,用两部不同位置的照相机拍照,就获得该点在两个像平面上的坐标。
如果知道两部相机的相对位置,就可以知道该特征点的具体位置。
基于两步法的数码相机定位摘要数码相机定位在机器自动装配系统、工业视觉检测与识别、三维重建、机器人视觉导航、运动分析、海上目标跟踪、交通监管(电子警察)等诸多领域中得到了运用。
本文给出了确定靶标上圆的圆心在该相机像平面的像坐标的数学模型及确定两部固定相机相对位置的数学模型,并设计出了相应的求解算法。
首先在仅考虑单相机的情况下,在分析相机成像原理和四个坐标系之间的相互变换关系的基础上,考虑了相机径向畸变和切向畸变即非线性畸变因素,选择了一种简化模型,克服了相机内外参数未知情况下求解像坐标的困难,最终建立了基于两步法的像坐标确定模型。
该模型满足牛顿迭代法的收敛条件,保证了模型解的稳定性。
其次利用该模型,针对问题1和问题2,借助于Matlab工具,计算了靶标上给定5个圆的圆心像坐标。
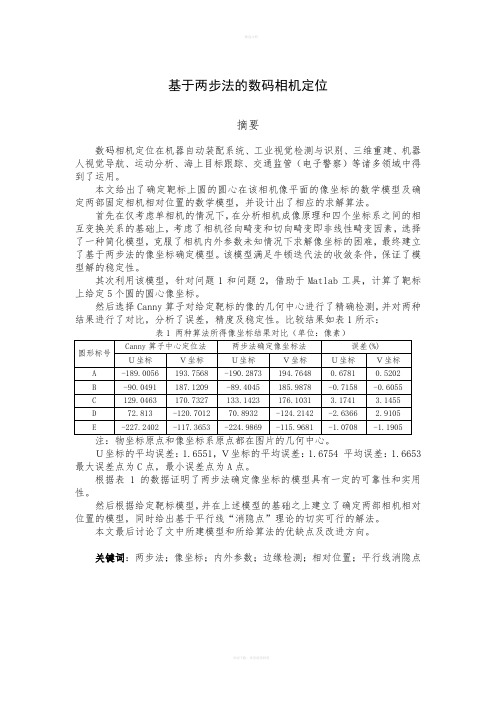
然后选择Canny算子对给定靶标的像的几何中心进行了精确检测,并对两种结果进行了对比,分析了误差,精度及稳定性。
比较结果如表1所示:U坐标的平均误差:1.6551,V坐标的平均误差:1.6754 平均误差:1.6653最大误差点为C点,最小误差点为A点。
根据表1的数据证明了两步法确定像坐标的模型具有一定的可靠性和实用性。
然后根据给定靶标模型,并在上述模型的基础之上建立了确定两部相机相对位置的模型,同时给出基于平行线“消隐点”理论的切实可行的解法。
本文最后讨论了文中所建模型和所给算法的优缺点及改进方向。
关键词:两步法;像坐标;内外参数;边缘检测;相对位置;平行线消隐点一、问题的提出1.1 背景说明数码相机定位在交通监管(电子警察)等方面有广泛的应用。
由于目前数字图像的处理速度越来越快,且可达0.02个像素精度[1],因此考虑畸变系统误差的高精度标定具有重要的意义。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
数码相机定位摘要随着数码技术的迅速发展,数码相机定位在交通监管(电子警察)等方面得到了泛的应用,本文主要基于数码相机的成像模型讨论了如何从物平面到像平面的坐标变换,来解决对单目定位中靶标上一个特征点(圆心)在一部固定相机的像平面中的坐标以及对双目定位中由靶标上特征点的位置来确定两部相机的相对位置。
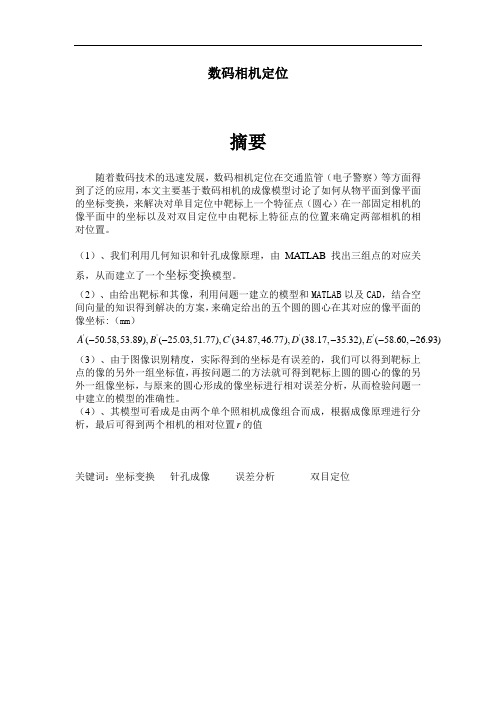
(1)、我们利用几何知识和针孔成像原理,由MATLAB找出三组点的对应关系,从而建立了一个坐标变换模型。
(2)、由给出靶标和其像,利用问题一建立的模型和MATLAB以及CAD,结合空间向量的知识得到解决的方案,来确定给出的五个圆的圆心在其对应的像平面的像坐标:(mm)'''''-----A B C D E(50.58,53.89),(25.03,51.77),(34.87,46.77),(38.17,35.32),(58.60,26.93)(3)、由于图像识别精度,实际得到的坐标是有误差的,我们可以得到靶标上点的像的另外一组坐标值,再按问题二的方法就可得到靶标上圆的圆心的像的另外一组像坐标,与原来的圆心形成的像坐标进行相对误差分析,从而检验问题一中建立的模型的准确性。
(4)、其模型可看成是由两个单个照相机成像组合而成,根据成像原理进行分析,最后可得到两个相机的相对位置r的值关键词:坐标变换针孔成像误差分析双目定位一、问题重述数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。

数码相机定位摘要数码相机定位在08年北京奥运cctv监控系统,机器人视觉系统,交通监管(电子警察)等方面受到广泛的应用,本文建模主要解决了相机标定中的两大问题,一为靶标像点的提取,二为两部固定相机相对位置的确定。
运用计算机图形处理和立体视觉的知识我们给出了以上问题的解法。
问题一,首先对靶标的像进行处理,通过matlab将图像转换为数字化灰度矩阵,基于阈值法对图像分割处理将灰度矩阵二值化。
据此建立两种像点提取模型和算法。
模型一通过做图像的外切矩形,确定其中心即为像点坐标。
模型二通过编程提取像闭边缘的像素坐标,用matlab对离散点进行椭圆拟合,确定椭圆中心即为像点坐标。
问题二,利用问题一的两种模型和算法,导入数值和图像进行求解,得到靶标上圆的圆心在该相机像平面的像的物理坐标,如下表所示:问题三,利用问题二两种模型各自求解得到的物点和像点坐标的数据,分别建立TSAI模型对相机进行标定,求解内外部参数,将得到的内部参数像距与实际像距差值对比分析,得到模型一和二的相对误差分别为2.926%,0.751% ,模型二的精度明显比模型一的高。
并对运用TSAI模型检验的精度和稳定性进行了讨论,认为该检验方法精度较高,稳定性较好。
问题四,利用问题三的TSAI模型标定结果所得的外部参数,通过空间坐标变换,求出两部固定相机的相对位置。
关键词:像点提取;图形处理;椭圆拟合模型;TSAI模型1问题重述数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A我们的参赛报名号为(如果赛区设置报名号的话):赛区评阅编号(由赛区组委会评阅前进行编号):编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):数码相机定位算法研究摘要本文利用数码相机成像原理,建立数学模型,实现了利用相机摄制物体的图像进行系统标定。
针对问题一,根据空间解析几何中的理论,建立了世界坐标系、摄像机坐标系、像平面坐标系和影像坐标系 4 套坐标系,利用针孔成像原理,结合空间坐标转化知识,推导出 4 套坐标系中点的坐标转化关系,建立了三维单目定标模型。
结合靶标图为平面的特点,将模型简化为二维单目定标模型,利用直接线性变换算法对模型进行求解。
针对问题二,利用图像射影的交比不变性,确定靶标图中的特征点与像图中点的对应关系,对问题一中的二维单目定标模型进行求解,得到相机的内部参数与外部参数,最终求解出靶标上圆的圆心在该相机像平面的像素坐标,具体求解同时求解出相机的偏转角-18.8747°、倾斜角为9.7535°和俯仰角为155.0864°,以及相机光学中心在世界坐标系中的坐标为(-160.2588,170.6876,424.1587)。
将求得结果与椭圆拟合定中心的近似处理方法得出的结果进行比较,在图像平面与靶标图所在平面夹角较小且精度要求不高的情况下,椭圆拟合求出的中心来可以近似代替靶标图中圆的圆心的实际投影。
基于遗传算法与射影几何理论的数码相机定位模型摘要在数码相机定位领域中,对特征点匹配和系统标定的研究存在着巨大的理论与现实 意义。
针对问题一,利用空间坐标变换理论,得到含参的物平面到像平面的映射关系,提 取特征点进行匹配, 建立以偏差最小为目标函数的规划模型, 用遗传算法进行优化搜索, 确定参数得到最优映射关系,从而求解圆心对应的像坐标。
针对问题二,首先对图像进行数字化处理,提取图像轮廓的坐标矩阵,改变模型一 的目标函数再次建立规划模型,用Matlab编写遗传算法进行求解,得 5个圆心的像坐标 为:A’(324,201),B’(418,203),C’(632,209),D’(587,498),E’(290,499)。
对结果进行分析, 得结论圆度比越大的类椭圆对应的圆心像坐标越精确。
针对问题三,引入差异度作为检验模型的标准,给出模型检验方法,并对差异度因 子的精度和稳定性进行了讨论。
分析后得知该检验方法精度与数码相机分辨率成正相 关,而其稳定性在面对非对称图形时较高。
针对问题四, 运用射影几何理论, 在相机主光轴平行放置和非平行放置两种情况下, 分别建立了以实际圆心距和理论圆心距的误差最小为目标的规划模型。
在模型讨论中还 进一步引入径向畸变,使模型更加贴近实际情况。
在模型推广中,重新设计了一种标靶。
根据射影变换理论,引入共线性作为模型检 验因子,并给出了检验原理和方法,是第三问的另一个有益的研究方向。
关键词:空间坐标变换 遗传算法 差异度检验 射影几何理论一、 问题重述数码相机定位有着广泛的应用,最常用的定位方法是双目定位,即用两部相机来定 位。
对物体上一个特征点,用两部固定的相机拍摄可以获得该点在像平面上的坐标,只 要知道两部相机精确的相对位置,就可通过几何方法确定特征点的位置,这一过程称为 系统标定。
标定的做法是在一块平板上画出若干个点,同时用这两部相机照相得到像平 面上的像点,利用这两个像点的几何关系就可以得到这两部相机的相对位置。
数码相机定位问题的研究摘要本文从计算机视觉系统出发,对数码相机的定位问题进行了深入研究,并建立了相应的数学模型。
对于问题一,先运用光学成像的相关知识,建立了针孔模型,然后又考虑了摄像机的畸变问题,对上述模型进行改进,建立了非线性模型,并给出了相应的算法。
对于问题二,基于问题一中建立的模型,运用最小二乘法的思想,利用Matlab软件进行了检验,并对该方法的精度和稳定性进行了讨论。
对于问题四,运用几何学的相关知识,建立了双目定位系统中两部相机之间的关系式,从而确定了它们在空间中的相对位置关系,并给出了相应的算法。
本文综合考虑多方面因素,公式、表格、图形表达相结合,建立的模型结构严密,具有较强的逻辑推理性,最后并对结果进行分析与检验,符合实际情况,具有一定的参考价值。
关键词:数码相机针孔模型靶标蒙特卡罗一、问题重述1.1基本情况数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
标定的一种做法是:在一块平板上画若干个点,同时用这两部相机照相,分别得到这些点在它们像平面上的像点,利用这两组像点的几何关系就可以得到这两部相机的相对位置。
然而,无论在物平面或像平面上都无法直接得到没有几何尺寸的“点”。
实际的做法是在物平面上画若干个圆(称为靶标),它们的圆心就是几何的点了。
而它们的像一般会变形,如附件图1所示,所以必须从靶标上的这些圆的像中把圆心的像精确地找到,标定就可实现。
有人设计靶标如下,取1个边长为100mm的正方形,分别以四个顶点(对应为A、C、D、E)为圆心,12mm为半径作圆。