串联迟后-超前校正,PID校正
- 格式:ppt
- 大小:1.47 MB
- 文档页数:17
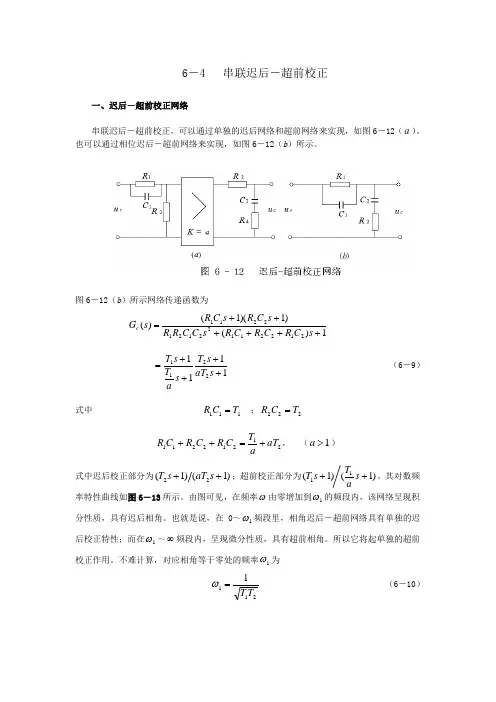
6-4 串联迟后-超前校正一、迟后-超前校正网络串联迟后-超前校正,可以通过单独的迟后网络和超前网络来实现,如图6-12(a )。
也可以通过相位迟后-超前网络来实现,如图6-12(b )所示。
图6-12(b )所示网络传递函数为1)()1)(1()(212211*********++++++=s C R C R C R s C C R R s C R s C R s G c 11112211++++=s aT s T s a T s T (6-9) 式中 111T C R = ;222T C R =21212211aT aT C R C R C R +=++, (1>a ) 式中迟后校正部分为)1()1(22++s aT s T ;超前校正部分为)1()1(11++s aT s T 。
其对数频率特性曲线如图6-13所示。
由图可见,在频率ω由零增加到1ω的频段内,该网络呈现积分性质,具有迟后相角。
也就是说,在0~1ω频段里,相角迟后-超前网络具有单独的迟后校正特性;而在1ω~∞频段内,呈现微分性质,具有超前相角。
所以它将起单独的超前校正作用。
不难计算,对应相角等于零处的频率1ω为 2111T T =ω (6-10)二、串联迟后-超前校正应用串联迟后-超前校正设计,实际上是综合地应用串联迟后校正与串联超前校正的设计方法。
当未校正系统不稳定,且校正后系统对响应速度、相角裕量和稳态精度的要求均较高时,以采用串联迟后-超前校正为宜。
利用迟后-超前网络的超前部分来增大系统的相角裕量,同时利用迟后部分来改善系统的稳态性能或动态性能。
下面举例说明串联迟后-超前校正设计的一般步骤。
【例6-4】 设单位反馈系统,其开环传递函数为)15.0)(1()(++=s s s K s G 要求:(1)开环放大系数110-=s K ;(2)相角裕量︒=50γ;(3)幅值裕量dB h 10=;试确定串联迟后-超前校正网络的传递函数)(s G c 。
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。

目录一、绪论 (1)二、原系统分析 (1)2.1原系统的单位阶跃响应曲线 (1)2.2原系统的Bode图 (2)2.3原系统的Nyquist曲线 (4)2.4原系统根轨迹 (5)三、校正装置设计 (6)3.1校正装置参数的确定 (6)3.2校正装置的波特图 (7)四、校正后系统的分析 (8)4.1校正后系统的单位阶跃响应曲线 (8)4.2校正后系统的波特图 (9)4.3校正后系统的Nyquist曲线 (10)4.4校正后系统的根轨迹 (11)五、总结 (13)六、参考文献 (13)一、绪论在系统中,往往需要加入一些校正装置来增加系统的灵活性,使系统发生变化,从而满足给定的各项性能指标。
按照校正装置的特性不同,可分为PID 校正、超前校正、滞后校正和滞后-超前校正。
我们在这里讨论串联超前校正。
在直流控制系统中,由于传递直流电压信号,适于采用串联校正。
串联超前校正的基本原理:利用超前网络的相角超前特性。
只要正确的将超前网络的交接频率1/aT 和1/T 选择在带校正系统截止频率的两旁,并适当选取参数a 和T ,就可以校正系统的截止频率和相角裕度满足性能指标的要求,从而改善系统的动态性能。
串联超前校正的优点:保证低频段满足稳态误差,改善中频段,使截止频率增大,相角裕度变大,动态性能提高,高频段提高使其抗噪声干扰能力降低。
有些情况下采用串联超前校正是无效的,它受到以下两个因素的限制: 1.闭环宽带要求。
若待校正系统不稳定的话,为了得到规定的相角裕度,需要超前网络提供很大的相角超前量。
这样的话,超前网络的a 值必须选取的很大,从而造成已校正系统带宽过大,使得通过系统的高频噪声电平很高,很可能使系统失控。
2.在截至频率附近相角迅速减小的待校正系统,一般不宜采用串联超前校J 卜。
因为随着截止频率的增大,待校正系统相角迅速减小,使已校正系统的相角裕度改善不大,很难得到足够的相角超前量,在一般情况下,产生这种相角迅速减小的原因是,在待校正系统的截止频率附近,或有交接频率彼此靠近的惯性环节;或由两个交接频率彼此相等的惯性环节;或有一个震荡环节。
目录一、设计目的-------------------------------------------------------------1二、设计要求-------------------------------------------------------------1三、实现过程-------------------------------------------------------------33.1系统概述-------------------------------------------------------- 33.1.1设计原理------------------------------------------------- 33.1.2设计步骤------------------------------------------------- 43.2设计与分析----------------------------------------------------- 53.2.1校正前参数确定--------------------------------------- 53.2.2确定校正网络的传递函数--------------------------- 53.2.3 理论系统校正后系统的传递函数和BODE 图-- 73.2.4系统软件仿真------------------------------------------ 8四、总结------------------------------------------------------------------15五、参考文献-------------------------------------------------------------16自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
完成一个控制系统的设计任务,往往需要经过理论和实践的反复比较才可以得到比较合理的结构形式和满意的性能,在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正、超前滞后校正这三种类型,也就是工程上常用的PID 调节器。
本次课设采用的超前超前校正的基本原理是利用超前相角补偿系统的滞后相角,改善系统的动态性能,如增加相角裕度,提高系统稳定性能等,而由于计算机技术的发展,matlab 在控制器设计,仿真和分析方面得到广泛应用。
本次课设采用用Matlab 软件对系统进行了计算机仿真,分析未校正系统的动态性能和超前校正后系统是否满足相应动态性能要求。
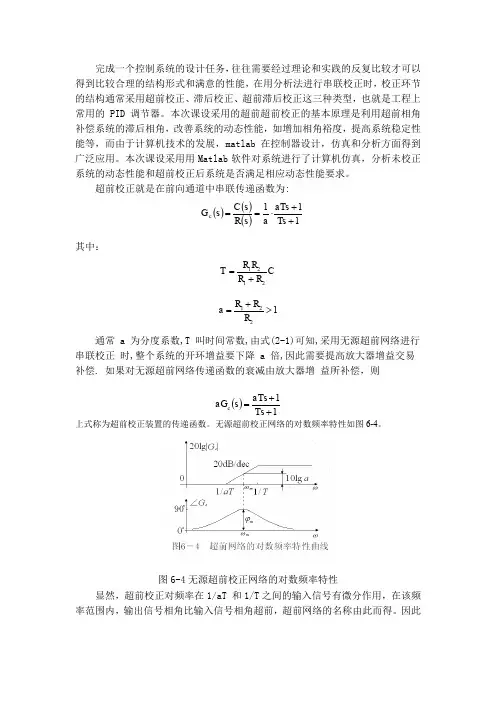
超前校正就是在前向通道中串联传递函数为:()()()111G c ++⋅==Ts aTs a s R s C s 其中:C R R R R T 2121+= 1221>+=R R R a 通常 a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行串联校正 时,整个系统的开环增益要下降 a 倍,因此需要提高放大器增益交易补偿. 如果对无源超前网络传递函数的衰减由放大器增 益所补偿,则()11++=Ts aTs s aG c 上式称为超前校正装置的传递函数。
无源超前校正网络的对数频率特性如图6-4。
图6-4无源超前校正网络的对数频率特性显然,超前校正对频率在1/aT 和1/T 之间的输入信号有微分作用,在该频率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。
因此超前校正的基本原理就是利用超前相角补偿系统的滞后相角,改善系统的动态性能,如增加相位裕度,提高系统的稳定性等。
下面先求取超前校正的最大超前相角m ϕ及取得最大超前相角的频率mω,则像频特性: ()ωϕc =arctanaT ω-arctanT ω()()()221T 1d ωωωϕωT T a aT d c +-+= 当(),0=ωϕωd d e 则有: T a m 1=ω 从而有:aa T a T T a aT 1arctan arctan 1arctan 1arctan m -=-=ϕ =11arcsin 21arctan 111arctan +-=-=+-a a a a aa a a 既当T a m 1=ω时,超前相角最大为11arcsin m +-=a a ϕ,可以看出mϕ只与a 有关这一点对于超前校正是相当重要的超前校正RC 网络图如图2。
目录绪论 (2)一课程设计的目的及题目 (3)1.1课程设计的目的 (3)1.2课程设计的题目 (3)二课程设计的任务及要求 (4)2.1课程设计的任务 (4)2.2课程设计的要求 (4)三校正函数的设计 (5)3.1理论知识 (5)3.2设计部分 (6)四传递函数特征根的计算 (10)4.1校正前系统的传递函数的特征根 .................. 错误!未定义书签。
4.2校正后系统的传递函数的特征根 .................. 错误!未定义书签。
五系统动态性能的分析.. (11)5.1校正前系统的动态性能分析 (12)5.2校正后系统的动态性能分析 (15)六系统的根轨迹分析............................... 错误!未定义书签。
6.1校正前系统的根轨迹分析 ........................ 错误!未定义书签。
6.2校正后系统的根轨迹分析 (20)七系统的奈奎斯特曲线图 (20)7.1校正前系统的奈奎斯特曲线图 (20)7.2校正后系统的奈奎斯特曲线图 ................... 错误!未定义书签。
2 八系统的对数幅频特性及对数相频特性 ............... 错误!未定义书签。
8.1校正前系统的对数幅频特性及对数相频特性 (22)8.2校正后系统的对数幅频特性及对数相频特性 ........ 错误!未定义书签。
总结............................................. 错误!未定义书签。
6参考文献.......................................... 错误!未定义书签。
绪论在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。