串联超前校正参数确定
- 格式:ppt
- 大小:789.00 KB
- 文档页数:37
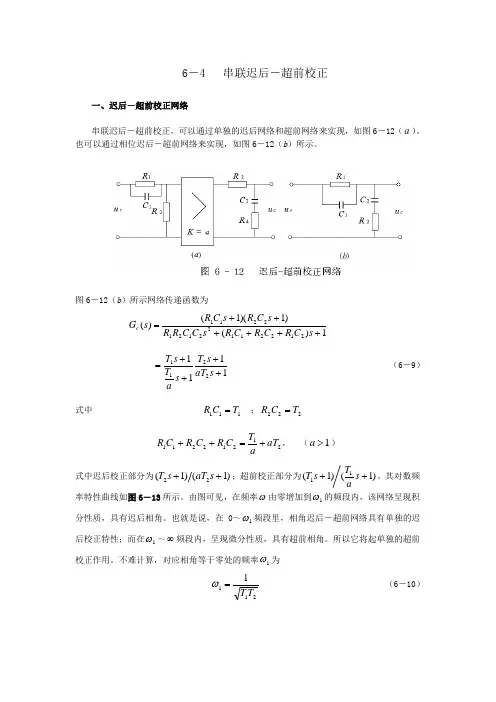
6-4 串联迟后-超前校正一、迟后-超前校正网络串联迟后-超前校正,可以通过单独的迟后网络和超前网络来实现,如图6-12(a )。
也可以通过相位迟后-超前网络来实现,如图6-12(b )所示。
图6-12(b )所示网络传递函数为1)()1)(1()(212211*********++++++=s C R C R C R s C C R R s C R s C R s G c 11112211++++=s aT s T s a T s T (6-9) 式中 111T C R = ;222T C R =21212211aT aT C R C R C R +=++, (1>a ) 式中迟后校正部分为)1()1(22++s aT s T ;超前校正部分为)1()1(11++s aT s T 。
其对数频率特性曲线如图6-13所示。
由图可见,在频率ω由零增加到1ω的频段内,该网络呈现积分性质,具有迟后相角。
也就是说,在0~1ω频段里,相角迟后-超前网络具有单独的迟后校正特性;而在1ω~∞频段内,呈现微分性质,具有超前相角。
所以它将起单独的超前校正作用。
不难计算,对应相角等于零处的频率1ω为 2111T T =ω (6-10)二、串联迟后-超前校正应用串联迟后-超前校正设计,实际上是综合地应用串联迟后校正与串联超前校正的设计方法。
当未校正系统不稳定,且校正后系统对响应速度、相角裕量和稳态精度的要求均较高时,以采用串联迟后-超前校正为宜。
利用迟后-超前网络的超前部分来增大系统的相角裕量,同时利用迟后部分来改善系统的稳态性能或动态性能。
下面举例说明串联迟后-超前校正设计的一般步骤。
【例6-4】 设单位反馈系统,其开环传递函数为)15.0)(1()(++=s s s K s G 要求:(1)开环放大系数110-=s K ;(2)相角裕量︒=50γ;(3)幅值裕量dB h 10=;试确定串联迟后-超前校正网络的传递函数)(s G c 。
课题:串联超前—滞后校正装置(二)专业:电气工程及其自动化班级: 2011级三班姓名:居鼎一(20110073)王松(20110078)翟凯悦(20110072)陈程(20110075)刘帅宏(20110090)邓原野(20110081)指导教师:毛盼娣设计日期:2013年12月2日成绩:重庆大学城市科技学院电气信息学院目录一、设计目的-------------------------------------------------------------1二、设计要求-------------------------------------------------------------1三、实现过程-------------------------------------------------------------33.1系统概述-------------------------------------------------------- 33.1.1设计原理------------------------------------------------- 33.1.2设计步骤------------------------------------------------- 43.2设计与分析----------------------------------------------------- 53.2.1校正前参数确定--------------------------------------- 53.2.2确定校正网络的传递函数--------------------------- 53.2.3 理论系统校正后系统的传递函数和BODE 图-- 73.2.4系统软件仿真------------------------------------------ 8四、总结------------------------------------------------------------------15五、参考文献-------------------------------------------------------------16自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
基于matlab的串联超前校正器设计基于MATLAB的串联超前校正器设计随着科技的不断发展,控制系统在各个领域得到广泛应用。
在实际应用中,控制系统往往需要对输入信号进行校正,以达到更好的控制效果。
其中,超前校正器作为一种常用的校正方法,被广泛应用于工业控制系统中。
本文将介绍基于MATLAB的串联超前校正器设计方法。
1. 超前校正器原理超前校正器是一种常用的控制系统校正方法,通过提前引入控制信号,可以在系统响应过程中提高相位裕度,从而提高系统稳定性和控制精度。
其原理如下:超前校正器的传递函数为:$$G_c(s)=K_c\frac{s+\frac{1}{T_f}}{s+\frac{1}{\alpha T_f}}$$其中,$K_c$为增益,$T_f$为超前时间常数,$\alpha$为超前系数。
超前校正器的传递函数可以看作是一个一阶惯性环节和一个一阶超前环节的串联。
超前校正器的作用是提高系统相位裕度,从而提高系统的稳定性和控制精度。
当系统响应过程中出现相位不足时,超前校正器可以提前引入控制信号,从而提高系统相位裕度,使系统更快地达到稳态,并提高系统的控制精度。
2. 串联超前校正器设计在实际应用中,常常需要对输入信号进行多次校正,以达到更好的控制效果。
此时,可以采用串联超前校正器的方法,对输入信号进行多次校正。
串联超前校正器的设计方法如下:我们需要确定每个超前校正器的参数,包括增益$K_c$、超前时间常数$T_f$和超前系数$\alpha$。
这些参数可以通过实验或模拟得到。
我们需要根据超前校正器的传递函数,将多个超前校正器串联起来。
串联超前校正器的传递函数为:$$G_c(s)=K_c\frac{(s+\frac{1}{T_{f1}})(s+\frac{1}{T_{f2}})...(s+\fr ac{1}{T_{fn}})}{(s+\frac{1}{\alpha T_{f1}})(s+\frac{1}{\alpha T_{f2}})...(s+\frac{1}{\alpha T_{fn}})}$$其中,$n$为超前校正器的个数,$T_{f1}$、$T_{f2}$、$...$、$T_{fn}$为每个超前校正器的超前时间常数,$\alpha$为超前系数。
设 计 任 务题目: 超前校正一、设计内容设某控制系统不可变部分的传递函数为)11.0)(1001.0()(0++=s s s K s G ,要求该系统有如下性能指标:1)响应匀速信号r(t)=1R t 的稳态误差不大于0.0011R ,其中1R 为常量;2)剪切频率ωc =165rad/s ;3)相角裕度045γ≥;4)幅值裕度20lg g K ≥15dB 。
二、设计要求试应用频率响应法确定串联超前校正参数要求方法一用带惯性的PD 控制器实现串联超前校正方案1)劳斯判据判定未校正系统的稳定性,确定校正环节的传递函数模型。
2)计算校正系统的开环增益写出计算公式并通过MATLAB 编程计算,用MATLAB 画出未校正系统开环频率响应的Bode 图,计算未校正系统的剪切频率 ωc 写出计算公式并通过MATLAB 编程计算,相角裕度γ1写出计算公式,并通过MATLAB 编程计算。
3)根据给定的性能,计算要求校正后系统的剪切频率写出计算公式并通过MATLAB 编程计算,确定中频段宽度h 写出计算公式并通过MATLAB 编程计算。
4)计算最大超前相角m ϕ写出计算公式并通过MATLAB 编程计算。
5)计算串联超前校正参数a,T 写出计算公式并通过MATLAB 编程计算。
6)用MATLAB 验证性能四项指标,如果不符合修正校正参数继续验证,用劳斯判据和Nyquist 判据判定校正后系统稳定性。
7)设计校正环节的硬件参数,要求分别搭出无源校正和有源校正的电路图,确定电阻电容参数,用MATLAB 画出校正环节和最后的Bode 图,并进行对比说明。
要求方法二用PD 控制器实现串联超前校正方案1) 劳斯判据判定未校正系统的稳定性,确定校正环节的传递函数模型。
2) 根据要求求剪切频率ωc 计算出校正参数T 写出计算公式并通过MATLAB 编程计算。
3) 用MATLAB 验证性能四项指标,如果不符合修正校正参数继续验证,用劳斯判据和Nyquist 判据判定校正后系统稳定性。
串联超前校正
连锁校正,又称前兆校正或预见性校正,是一种利用模型的预测能力,检测并校正潜在的故障,以改善系统安全和可靠性的方法。
指的是根据集成到系统的模型,以及基于时间的监测,识别和修复潜在的故障和风险。
这些模型可以追踪和分析数据,帮助用户明确可能出现故障的部件和时间,使其能够有效预防和配置预案,
实现以预防为主的预见性维护。
实施连锁校正的过程常常包括三个步骤:监测,诊断和修复。
在监测阶段,系统通过检测易受攻击和失效的部件来收集参数、信号、统计等数据;然后,在诊断阶段,系统利用这些数据,基于模型和标准,通过运行环境和抽样等方式,辨认并分析出可能出现的缺陷;最后,在修复阶段,系统根据缺陷的严重性,制定并应用相应的维护方案,以保持系统的正常运行。
传统的故障检测和预防技术偏重于主动修复,即当出现故障时,系统会自动重启以修复故障。
而连锁校正则以预见为主,采用必要的现行管理和体制,将隐藏的故障原因提前发现,并制定合理的控制方案,来有效的减少故障的发生概率。
这种预防性的主动定期维护,可以很好的有效利用资源,有效减少无用功,加强系统安全性和可靠性,从而使组织节省维护成本,提高维修效率。

串联超前校正的设计步骤引言在工程领域中,为了确保系统的稳定性和性能,需要对系统进行校正。
其中一种常见的校正方法是串联超前校正。
本文将介绍串联超前校正的设计步骤,并详细讨论每个步骤的目标、方法和注意事项。
步骤一:系统分析和建模在进行任何形式的校正之前,首先需要对待校正系统进行全面的分析和建模。
该分析包括确定系统结构、参数和性能指标等。
目标:•理解待校正系统的结构和工作原理。
•理解各个组件之间的相互关系。
•确定待校正系统的参数和性能指标。
方法:1.收集有关待校正系统的技术规格说明书、原理图等资料。
2.绘制待校正系统的框图,标明各个组件之间的连接关系。
3.研究待校正系统中各个组件的功能和特性。
4.测试待校正系统以获取基本性能数据。
注意事项:•对于复杂的系统,可能需要使用计算机辅助设计(CAD)软件来绘制框图。
•在测试期间,确保使用准确和可靠的测试设备和方法。
步骤二:确定校正目标和要求在进行超前校正之前,需要明确校正的目标和要求。
这些目标和要求通常包括系统的稳定性、响应速度、抗干扰能力等。
目标:•确定校正的具体目标和要求。
•确定校正后系统应满足的性能指标。
方法:1.与系统设计人员和用户进行沟通,了解他们对系统性能的期望。
2.根据系统分析结果,确定校正目标和要求。
3.将校正目标和要求以清晰明确的方式记录下来。
注意事项:•在与设计人员和用户沟通时,需要充分理解他们的需求,并将其转化为具体的性能指标。
步骤三:设计串联超前校正器在完成系统分析、建模以及确定校正目标之后,可以开始设计串联超前校正器了。
串联超前校正器是一种用于改善系统响应速度和稳定性的控制器。
目标:•设计一个满足校正目标和要求的串联超前校正器。
•改善系统响应速度和稳定性。
方法:1.根据系统分析结果,选择合适的串联超前校正器类型。
2.根据校正目标和要求,设计串联超前校正器的传递函数。
3.使用数学工具(如MATLAB)进行仿真和优化。
4.根据仿真结果,进一步优化串联超前校正器的设计。
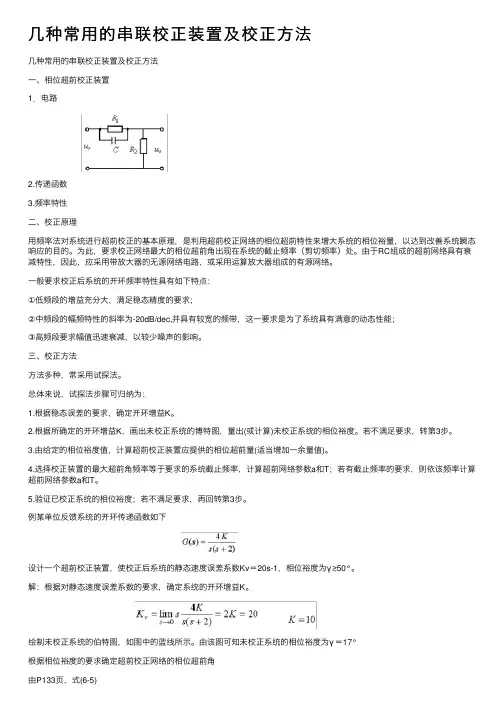
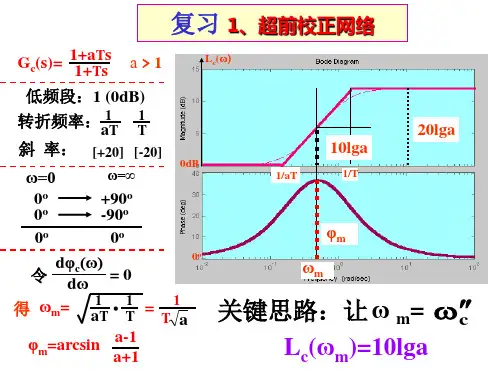
⼏种常⽤的串联校正装置及校正⽅法⼏种常⽤的串联校正装置及校正⽅法⼀、相位超前校正装置1.电路2.传递函数3.频率特性⼆、校正原理⽤频率法对系统进⾏超前校正的基本原理,是利⽤超前校正⽹络的相位超前特性来增⼤系统的相位裕量,以达到改善系统瞬态响应的⽬的。
为此,要求校正⽹络最⼤的相位超前⾓出现在系统的截⽌频率(剪切频率)处。
由于RC组成的超前⽹络具有衰减特性,因此,应采⽤带放⼤器的⽆源⽹络电路,或采⽤运算放⼤器组成的有源⽹络。
⼀般要求校正后系统的开环频率特性具有如下特点:①低频段的增益充分⼤,满⾜稳态精度的要求;②中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这⼀要求是为了系统具有满意的动态性能;③⾼频段要求幅值迅速衰减,以较少噪声的影响。
三、校正⽅法⽅法多种,常采⽤试探法。
总体来说,试探法步骤可归纳为:1.根据稳态误差的要求,确定开环增益K。
2.根据所确定的开环增益K,画出未校正系统的博特图,量出(或计算)未校正系统的相位裕度。
若不满⾜要求,转第3步。
3.由给定的相位裕度值,计算超前校正装置应提供的相位超前量(适当增加⼀余量值)。
4.选择校正装置的最⼤超前⾓频率等于要求的系统截⽌频率,计算超前⽹络参数a和T;若有截⽌频率的要求,则依该频率计算超前⽹络参数a和T。
5.验证已校正系统的相位裕度;若不满⾜要求,再回转第3步。
例某单位反馈系统的开环传递函数如下设计⼀个超前校正装置,使校正后系统的静态速度误差系数Kv=20s-1,相位裕度为γ≥50°。
解:根据对静态速度误差系数的要求,确定系统的开环增益K。
绘制未校正系统的伯特图,如图中的蓝线所⽰。
由该图可知未校正系统的相位裕度为γ=17°根据相位裕度的要求确定超前校正⽹络的相位超前⾓由P133页,式(6-5)超前校正装置在w m处的幅值为在为校正系统的开环对数幅值为-6.2dB 对应的频率,这⼀频率就作为是校正后系统的截⽌频率。
串联超前校正方法2超前网络的特性是相角超前,幅值增加。
串联超前校正的实质是将超前网络的最大超前角补在校正后系统开环频率特性的截止频率处,提高校正后系统的相角裕度和截止频率,从而改善系统的动态性能。
假设未校正系统的开环传递函数为)(0s G ,系统给定的稳态误差,截止频率,相角裕度和幅值裕度指标分别为***,,γωc ss e 和*h 。
设计超前校正装置的一般步骤可归纳如下:(1)根据给定稳态误差*ss e 的要求,确定系统的开环增益K 。
(2)根据已确定的开环增益K ,绘出未校正系统的对数幅频特性曲线,并求出截止频率0c ω和相角裕度0γ。
当*0c c ωω<,*0γγ<时可以考虑用超前校正。
(3)根据给定的相位裕度*γ,计算校正装置所应提供的最大相角超前量m ϕ,即)15~5(0︒︒+-=γγϕm (1)式中(5°~15°)是用于补偿引入超前校正装置,截止频率增大所导致的校正前系统的相角裕度的损失量。
若未校正系统的对数幅频特性在截止频率处的斜率为dec dB /40-,并不再向下转折时,可以取 8~5;若该频段斜率从dec dB /40-继续转折为dec dB /60-,甚至更负时,则补偿角应适当取大些。
注意:如果︒>60m ϕ,则用一级超前校正不能达到要求的*γ指标。
(4)根据所确定的最大超前相角m ϕ,求出相应的a 值,即m ma ϕϕsin 1sin 1-+= (2)(5)选定校正后系统的截止频率在a lg 10-处作水平线,与)(0ωL 相交于A '点,交点频率设为A 'ω。
取校正后系统的截止频率为{}*,max c A c ωωω'= (3)(6)确定校正装置的传递函数在选好的c ω处作垂直线,与)(0ωL 交于A 点;确定A 点关于dB 0线的镜像点B ,过点B 作dec dB /20+直线,与dB 0线交于C 点,对应频率为C ω;在CB 延长线上定D 点, 使Cc c D ωωωω=,在D 点将曲线改平,则对应超前校正装置的传递函数为1()1C CDsG s s ωω+=+ (4)(7)验算写出校正后系统的开环传递函数0()()()C G s G s G s =验算是否满足设计条件***h h c c ≥≥≥,,γγωω若不满足,返回(3),适当增加相角补偿量,重新设计直到达到要求。
2011 —2012 学年第 2 学期控制与机械工程 学院 电气工程及其自动化 系 09-2 班级课程设计名称: 自动控制原理课程设计设计题目: 串联超前校正装置的设计完成期限:自 2012 年 5 月 28 日至 2012 年 6 月 1 日共 1 周设计依据、要求及主要内容: 已知单位反馈系统的开环传递函数为:)1(25)(+=s s s G 要求校正后系统的相角裕度 45≥γ,截止频率s rad c /5.7≥ω,试设计串联超前校正装置。
基本要求:1、对原系统进行分析,绘制原系统的单位阶跃响应曲线,2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。
3、绘制原系统的Nyquist 曲线。
4、绘制原系统的根轨迹。
5、设计校正装置,绘制校正装置的Bode 图。
6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。
7、绘制校正后系统的单位阶跃响应曲线。
8、绘制校正后系统的Nyquist 曲线。
9、绘制校正后系统的根轨迹。
指导教师(签字):系主任(签字):批准日期:2012年5月25日目录一、绪论 (3)二、原系统分析 (4)2.1原系统的单位阶跃响应曲线 (4)2.2 原系统的Bode图 (4)2.3 原系统的Nyquist曲线 (5)2.4 原系统的根轨迹 (7)三、校正装置设计 (8)3.1 校正装置参数的确定 (8)3.2 校正装置的Bode图 (7)四、校正后系统的分析 (9)4.1校正后系统的单位阶跃响应曲线 (9)4.2 校正后系统的Bode图 (9)4.3 校正后系统的Nyquist曲线 (10)4.4 校正后系统的根轨迹 (10)五、总结 (10)六、附图 (12)七、参考文献 (17)一、绪论概述超前或滞后校正的优缺点和适用范围串联超前校正的优点:保证低频段满足稳态误差,改善中频段,使截止频率增大,相角裕度变大,动态性能提高,高频段提高使其抗噪声干扰能力降低。