根轨迹串联超前校正
- 格式:pdf
- 大小:429.23 KB
- 文档页数:16
基于根轨迹法的串联校正注意:1)一般了解根轨迹校正方法。
若指标为时域指标采用;方法简单,容易理解;虽然计算均为代数计算,但是太繁杂,一般不采用。
2)重点掌握频率法的串联校正。
若指标为频域指标采用。
例5 已知待校正系统的单位反馈系统的开环传递函数为0()(0.51)K G s s s =+试设计串联校正环节,使得校正后系统()c G s 1) 静态速度误差系数;150v K s -≥2) 超调量; %25%σ≤3) 调节时间。
2s t s ≤解:1) 求取主导极点位置由,得,这里取。
%e 100%20%σ=≤0.4ζ≥0.5ζ=取,由,得,这里取。
0.02∆=42s nt ζω=≤4n ω≥4n ω=则闭环主导极点1,22n s j j ζωω=-±=-±2)将系统传递函数化成零极点形式:02()(0.51)(2)K K G s s s s s ==++011(0)(2)(20)(22)30(21),0,1,2s s j j l l π-∠--∠+=-∠-+--∠-++=-≠+=±± 不满足则进行动态校正。
3) 动态校正——相当于频率法中超前校正-----------------------------------------------------以下是讨论----------------------------------------设校正装置,则此时。
111()()c cc c c s z G s k s p -=-'1112()()(2)()c c c Kk s z G s s s s p -=+-注意:校正前系统阶数为2,现在系统阶数为3。
因此,会出现两种情况:A: 校正后系统的阶数不变。
——加入的校正装置后系统的一个极点会与一个零点相互抵消。
这里令(为什么不,那就白加校正装置了)12c s z s -=+11c c s z s p -=-则,此时,阶数不变。
学号 10750128计算机控制技术课程设计设计说明书根轨迹超前校正设计起止日期:2013 年7 月15 日至2013 年7 月19 日学生姓名刘经雨班级10电气一班成绩指导教师(签字)控制与机械工程学院2013年7月10日天津城市建设学院课程设计任务书2012 —2013 学年第 2 学期控制与机械工程 学院 电气工程及其自动化 系 电气一班 班级 课程设计名称: 计算机控制技术课程设计 设计题目: 根轨迹超前校正设计完成期限:自 2013 年7 月 15 日至 2013 年 7 月 19 日共 1 周 设计依据、要求及主要内容:设单位反馈系统的开环传递函数为:)15)(5(1)(++=s s s s G要求系统满足最大超调量%30%≤σ,调整时间s t s 5.0≤,试设计超前校正装置。
基本要求:1、对原系统进行分析,确定期望极点在S 复平面的位置;2、求校正补偿器的传递函数;3、计算校正后系统的性能指标:超调量、峰值时间,调节时间,并绘制系统校正后的阶跃响应曲线。
指导教师(签字): 教研室主任(签字): 批准日期:2013年7月10日目录一设计原理 (1)1、何谓校正为何校正 (1)2、超前校正的原理 (1)3、超前校正在根轨迹中的应用方法。
(2)二设计方法步骤 (2)2.1画出未校正前的根轨迹 (2)2.2校正方法 (3)2.3校正计算: (4)三课程设计总结 (8)参考文献 (9)一 设计原理1、何谓校正 为何校正所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,是系统整个特性发生变化。
校正的目的是为了在调整发大器增益后仍然不能全面满足设计要求的性能指标的情况下,通过加入的校正装置,是系统性能全面满足设计要求。
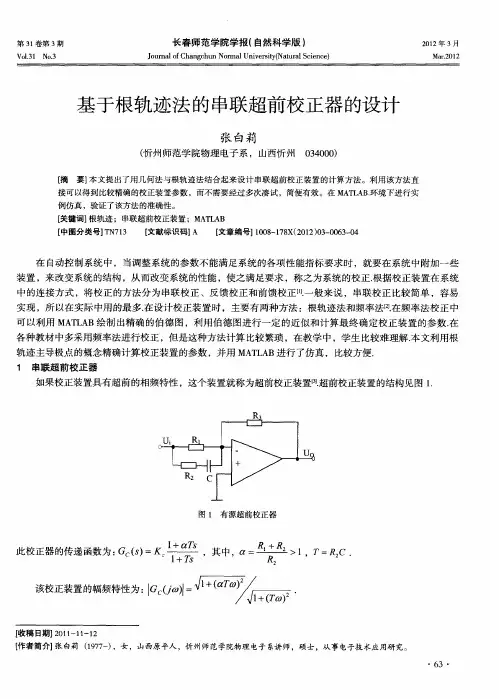
2、 超前校正的原理无源超前网络的电路如图 1 所示。
图1无源超前网络电路图如果输入信号源的内阻为零,且输出端的负载阻抗无穷大,则超前网络的传递函数可写为()TsaTss aG c ++=11 (2—1)式中1221>+=R R R a ,C R R R R T 2121+=通常 a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行串联校正时,整个系统的开环增益要下降a 倍,因此需要提高放大器增益交易补偿。
2010 —2011学年第X学期《基于根轨迹的超前校正设计》题目:基于根轨迹的超前校正设计专业: XXXXXXXXXXXXXXXXXXXXXXXX 班级: XXXXXXXXXXXXXXXXXXXXXXXXXXXX 姓名: XXXXXXXXXXXXXXX 指导教师: XXXXXXXXXXXXX 成绩:电气工程系2010年12月8日已知单位负反馈系统对象的传递函数为:01=s(2)G s +(s ) 试使用根轨迹几何方法对系统进行超前串联校正设计,使之满足:(1):阶跃响应的超调量%20%σ≤;(2):阶跃响应的调节时间 1.2s t s ≤。
解:(1)确定希望极点在S 复平面上的位置根据题意,要求超调量%20%σ≤,用以下MATLAB 语句求ς。
sigma=0.2; zeta=((log(1/sigma))^2/((pi)^2+(log(1/sigma))^2))^(1/2)可以求得ς为:zeta =0.4559,即ς≥0.4599,取ς=0.5,由()5%s t =3n ςω=1可得n ω=6rad/s 。
然后根据根轨迹法则,给出以下MATLAB 语句求在S 平面上希望极点的位置。
>> zeta=0.5;wn=6;>> p=[1 2*zeta*wn wn*wn];>> roots(p )运行以上MATLAB 语句,可求得根为:ans =-3.0000 + 5.1962i-3.0000 - 5.1962i即希望极点的位置为s1=-3.0000 + 5.1962i 和s2=-3.0000 - 5.1962i(2)求校正补偿器的传递函数 c cs a G K s b+=+ (1) 设未系统的传递函数为: 0()c s a G s K s b+=+ (2) 则校正后系统的开环传递函数为:0()()K ope c s a G s G s s b+=+ (3) 根据关系式(2)和(3),给出了L167.m 计算校正器的传递函数。
东北大学秦皇岛分校自动化工程系自动控制系统课程设计根轨迹串联超前校正专业名称自动化01班级学号508015080101学生姓名指导教师设计时间2020111111..6.2.277~20~20111111..7.8目录摘要 (1)1.绪论 (3)1.1课题概述 (3)1.2根轨迹法超前校正简介 (3)1.3课题研究的目的和意义 (4)1.4本课题研究的主要内容 (4)2.系统校正 (5)2.1已知条件及要求 (5)2.2对系统进行分析 (5)2.2.1当串联一个零点时 (7)2.2.2串联一个具有零点性质的零极点对 (8)2.2.3串联一个具有两个零点,一个极点的控制器时 (9)2.2.4当串联具有零点性质的两个极点,一个零点的控制器时 (10)2.2.5串联更复杂的具有零点性质的控制器 (11)3.总结 (13)4.致谢 (13)5.参考文献 (14)摘要根轨迹法是一种直观的图解方法,它显示了当系统某一参数(通常为增益)从零变化到无穷大时,如何根据开环极点和零点的位置确定全部闭环极点位置。
从根轨迹图可以看出,只调整增益往往不能获得所希望的性能。
事实上,在某些情况下,对于所有的增益,系统可能都是不稳定的。
因此,必须改造系统的根轨迹,使其满足性能指标。
利用根轨迹法对系统进行超前校正的基本前提是:假设校正后的控制系统有一对闭环主导极点,这样系统的动态性能就可以近似地用这对主导极点所描述的二阶系统来表征。
因此在设计校正装置之前,必须先把系统时域性能的指标转化为一对希望的闭环主导极点。
通过校正装置的引入,使校正后的系统工作在这对希望的闭环主导极点处,而闭环系统的其它极点或靠近某一个闭环零点,或远离s平面的虚轴,使它们对校正后系统动态性能的影响最小。
是否采用超前校正可以按如下方法进行简单判断:若希望的闭环主导极点位于校正前系统根轨迹的左方时,宜用超前校正,即利用超前校正网络产生的相位超前角,使校正前系统的根轨迹向左倾斜,并通过希望的闭环主导极点。
一种基于根轨迹串联超前校正的计算方法
王俐
【期刊名称】《南昌大学学报(理科版)》
【年(卷),期】2007(031)006
【摘要】提出了一种把解析几何与根轨迹法结合起来实现串联超前校正计算方法,无需精确绘图和繁琐的试凑运算,也能得到精确而又令人满意的校正效果,为线性控制系统的设计提供了一种简便而有效的途径,也为线性系统设计的计算机仿真奠定了又一基础.
【总页数】3页(P610-611,615)
【作者】王俐
【作者单位】南昌大学,信息工程学院,江西,南昌,330031
【正文语种】中文
【中图分类】TP13
【相关文献】
1.用《几何画板》软件实现根轨迹法串联校正的设计和教学 [J], 贾新民
2.超前校正器的根轨迹法设计及其MATLAB实现 [J], 李钟慎
3.基于根轨迹法的串联超前校正器的设计 [J], 张白莉
4.一种串联超前校正的设计方法 [J], 汤铁群;赵明
5.基于根轨迹法的串联超前校正器的设计 [J], 张白莉;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于根轨迹法的超前-滞后校正超前校正的根轨迹设计法。
滞后环节的根轨迹设计方式超前滞后校正的根轨迹设计法。
1.1.1大体概念1.根轨迹根轨迹是指系统的增益K由零到正无穷大时的闭环特征方城的根在s平面上的转变的轨迹。
在系统的增益K由零转变到负无穷大时闭环特征方程的根的轨迹为补根轨迹。
系统闭环特征方程的根轨迹与补根轨迹称为全根轨迹。
通常情形下根轨迹时指增益K由零到正无穷大下的根的轨迹。
2.超前校正的根轨迹设计法。
基于根轨迹的超前校正设计是通过串联超前校正环节,即增加开环极点和零点,对原来的根轨迹进行调整,取得所需的根轨迹。
通常常利用解析法取得超前校正环节。
设校正环节的传递函数为:sT Z+1G C(s)=K C一一一一――sT P+1解析法的设计步骤如下:(1)按照所需闭环系统稳态误差和瞬态特性,肯定闭环极点s1,并设定校正环节的增益K C;(2)按照闭环特征方程的幅值和相位角条件,应该知足如下条件:s1T Z+1G C(s1)G(s1)=K C―――――M G E^-jӨG=1E^jπs1T P+1式中,Mg是开环系统G在s1的幅值,ӨG是开环系统G在s1的相位角。
(3)设s1表示为s1=M S E^-jӨS,则有1E^jπM S E^-jӨsTz+1= ――――――[M S E^-jӨS T P+1]K C M G E^-jӨG(4)上述方程分解为实部和虚部两个方程,取得有两个未知数的两个方程,其解为sinӨS-K C M G sin(ӨG-ӨS) K C M G sinӨS+sin(ӨG+ӨS)T Z=―――――――――――;T P=――――――――――――K C M G sinӨG M S sinӨG(5) 按照T Z, T P,K C取得超前校正环节的传递函数G C(s);(6) 检查闭环系统的其它性能指标是不是知足要求,若是不知足,则改变K C,从头计算。
例如:已知燃油调节控制系统的开环传递函数为2G P(s)=――――――――s(1+(1+试设计超前校正环节,使其校正后系统静态速度误差系数小于K V=10,闭环主导极点知足阻尼比ζ=和自然频率Wn=s。
1、根轨迹串联超前校正原系统可能对于所有的增益值都不稳定,也可能虽属稳定,但不具有理想的瞬态响应特性。
为了矫正这些问题,可以在前向通道中串联一个或几个适当的超前校正装置,是闭环主极点位于复平面内希望的位置上。
说明:采用PD控制器gc(s)=Ts+1=T(s-z);采用带惯性的PD控制器,gc=aTs+1/Ts+1=a*(s-z)/(s-p),(a=z/p>1)采用根轨迹的几何设计方法设计串联超前校正装置步骤:(1)根据动态性能指标要求确定闭环主极点的希望位置。
(2)计算出校正装置需要提供的补偿相角。
若相角为零,则说明根轨迹的辐角条件已经满足,只需调整系统增益就可,否则需要超前校正装置来补偿相角。
若相角大于90度,可考虑采用两个PD控制器串联。
(3)确定校正装置的参数。
(4)验算性能指标。
不能达到指标则需调整s1的位置重复上述步骤。
例:开环传函G0=k/(s(s+5)(s+20))指标要求:开环增益>=12;超调量<=25%,ts<=0.7s(delt=0.02)。
KK=1200;bp=0.25;ts=0.7;delta=0.02;ng0=[1];dg0=conv([1,0],conv([1,5],[1,20]));G0=tf(KK*ng0,dg0); %构造开环传函s=bpts2s(bp,ts,delta) %求期望的闭环主极点[ngc,dgc]=rg_lead(KK*ng0,dg0,s); %得到校正装置Gc=tf(ngc,dgc)G0c=tf(G0*Gc);b1=feedback(G0,1); %未校正系统的闭环传递函数b2=feedback(G0c,1); %校正后系统的闭环传递函数step(b1,'r--',b2,'b');axis([0,1.2,0,1.8]);grid on %绘制校正前后的单位阶跃响应[pos,tr,ts,tp]=stepchar(b2,delta) %验算时域性能指标注:如果某参数不能满足(如调整时间),需要调整闭环主极点的位置。
系统校正设计:根轨迹法超前校正 一.校正原理如果原系统的动态性能不好,可以采用微分校正,来改善系统的超调量p M 和调节时间s t ,满足系统动态响应的快速性与平稳性的定量值。
微分校正的计算步骤如下。
(1)作原系统根轨迹图;(2)根据动态性能指标,确定主导极点i s 在S 平面上的正确位置; 如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3)在新的主导极点上,由幅角条件计算所需补偿的相角差φ; 计算公式为:is s=︒±=(s)][G arg -180o ϕ (1-1)此相角差φ表明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件(4)根据相角差φ,确定微分校正装置的零极点位置;注意满足相角差φ的零极点位置的解有许多组,可任意选定。
在这里给出一种用几何作图法来确定零极点位置的方法如下 ○1过主导极点i s 与原点作直线OA , ○2过主导极点i s 作水平线,○3平分两线夹角作直线AB 交负实轴于B 点, ○4由直线AB 两边各分ϕ21识作射线交负实轴,左边交点为D P -,右边交点为为D Z -,如图1-1所示。
微分校正装置的传递函数为D D c P s Z s (s)++=G(1-2)图1-1 零极点位置的确定(5)由幅值条件计算根轨迹过主导极点时相应的根轨迹增益gc K 的值,计算公式为1(s)(s)G G o c ==i s s(1-3)(6)确定网络参数。
(有源网络或者无源网络);(7)校核幅值条件(s)(s)o c G G 、幅角条件(s)](s)G [G arg o c 、动态性能指标p M 和s t 等。
二.校正实例已知系统的开环传递函数为)2s(s 4(s)o +=G ,要求s t s 2%,20M p <<,试用根轨迹法作微分校正。
解:(1)作原系统的根轨迹图如图1-3所示 ○1 原系统的结构图如图1-2所示图1-2 原系统的结构图○2仿真原系统的根轨迹程序如下:k=4; %零极点模型的增益值z=[]; %零点p=[0,-2]; %极点sys=zpk(z,p,k);rlocus(sys);图1-3 原系统的根轨迹图(2)计算原系统性能指标042s 2=++s(1-4)闭环极点为 31-s j ±=核算系统的动态性能o 60=β,5.0=ζ,2n =ω%20%3.16%1002-1_p <=⨯=πζζe M (1-5)原系统的超调量满足要求。
控制系统校正的根轨迹方法用根轨迹法进行校正的基础,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S平面上通过希望的闭环极点。
根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。
应用根轨迹进行校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。
在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。
等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳定性。
在开环传递函数中增加零点,可以使根轨迹向左方移动,从而提高系统的相对稳定性,减小系统调节时间。
等同于微分控制,相当于给系统前向通道中增加了零点,因此增加了系统的超调量,并且加快了瞬态响应。
根轨迹超前校正计算步骤如下。
(1) 作原系统根轨迹图;(2) 根据动态性能指标,确定主导极点s在S平面上的正确位置;如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3) 在新的主导极点上,由幅角条件计算所需补偿的相角差©;计算公式为:180 - arg[G o(s)]|s s i ⑴此相角差©表明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件。
(4) 根据相角差©,确定微分校正装置的零极点位置;微分校正装置的传递函数为:Gc Kc STZ 1(2)sTp 1例题:已知系统开环传递函数: G o2.3s(1+0.2s)(1+0.15s)试设计超前校正环节,使其校正后系统的静态速度误差系数Kv w 4.6,闭环主导极点满足阻尼比Z =0.2 ,自然振荡角频率3 n=12.0rad/s,并绘制校正前后系统的单位阶跃响应曲线、单位脉冲响应曲线和根轨迹。
解:由Kv lim s* G0(s) * Gc(s) 4.6 得kc=2s 0计算串联超前校正环节的matlab程序如下:主函数:close;num=2.3;den=con v([1,0],co nv([0.2,1],[0.15,1]));G=tf( nu m,de n) %zata=0.2;w n=12.0; % [nu m,de n]=ord2(w n, zata); % s=roots(de n);s1=s(1);kc=2; %Gc=cqjz_root(G,s1,kc)GGc=G*Gc*kc %Gy_close=feedback(G,1) %Gx_close=feedback(GGc,1) % figure(1);step(Gx_close,'b',3.5); % hold onstep(Gy_close,'r',3.5); % grid;gtext('校正前的'); gtext('校正后的'); figure(2);校正前系统开环传函要求参数追加系统动态特性增益kc校正后系统开环传函校正前系统闭环传函校正后系统闭环传函校正后单位阶跃响应校正前单位阶跃响应为使校正后系统的根轨迹能经过期望闭环主导极点, 其闭环特征方程跟必须满足impulse(Gx_close,'b',3.5); %校正后单位冲激响应hold onimpulse(Gy_close,'r',3.5); %校正前单位冲激响应grid;gtext ('校正前的');gtext ('校正后的');figure(3);rlocus(G,GGc); %根轨迹图grid;gtext ('校正前的');gtext ('校正后的');s Tz 1-幅值和相角条件,即GcS )G 0[s ) Kc 1M o e j 0 1e js 1Tp 1前系统在S 1处的幅值,B o 是对应的相角。
控制系统课程设计报告书 学院名称 : 自动化学院学生姓名 :陈 晶 06101078孙菲菲 06101090刘 洋 06101103陈和登 06101104专业名称 : 自动化班 级 : 自动1003班时间 : 2012年11月19日 至2019 年11月30日根轨迹超前校正设计一、设计要求: 控制系统为单位负反馈系统,开环传递函数为)4)(1()(0++=s s s k S G ,设计超前校正装置,要求:1.超调量%20%≤δ;2.调节时间不超过)02.0(4s s t s ±=∆=;3.掌握MATLAB 根轨迹校正方法及EDA 工具的实现;4.通过搭建实际电路,掌握校正对实际系统的影响。
二、设计方案分析:1、背景知识介绍:系统校正,就是在系统中加入一些参数可以根据需要而改变的机构或装置,使系统整个特性发生改变,从而满足给定的各项性能指标,在系统校正中,当系统的性能指标以单位阶跃响应的峰值时间、调节时间、超调量、阻尼比、稳态误差等时域特征量给出时,一般采用的是根轨迹校正法,实验所用软件为MATLAB 、EWB 软件,使用MATLAB 软件绘制系统校正前后的根轨迹图,系统的闭环阶跃响应,观察系统校正前后的各项性能指标是否满足系统所需性能指标,在Simulink 界面下或使用EWB 软件对校正前后的系统进行仿真运行,观察系统输出曲线的变化。
在控制系统设计中,常用的校正方法为串联校正和反馈校正,串联校正比反馈校正设计简单,也比较容易对信号进行各种必要形式的转换,特别在直流控制系统中,由于传递直流电压信号,适合采用串联校正。
在确定校正装置的具体形式时,根据校正装置所需提供的控制规律选择相应的元件,常常采用比例、微分、积分控制规律,或基本规律的组合,如比例微分、比例积分等。
2、方案设计:系统电路设计思路、原因、框图、器材选择等等。
1) 校正后开环传递函数的计算:由题意要求知:由此可得闭环主导极点为:需要补偿的超前角为:校正后系统的开环传递函数为:校正装置为:由于 c c p z < 所以 11<=c c p z α 为了弥补开环增益的损耗,则校正后的系统开环传递函数为:计算校正系统的零极点,从1s 点作平行于实轴的射线1s A ,然后作角A 1s 0的角平分线1s B ,最后1s c p 作1s c z 和,它们和1s B 的夹角为c ϕ/2。
东北大学秦皇岛分校自动化工程系自动控制系统课程设计根轨迹串联超前校正专业名称自动化01班级学号508015080101学生姓名指导教师设计时间2020111111..6.2.277~20~20111111..7.8目录摘要 (1)1.绪论 (3)1.1课题概述 (3)1.2根轨迹法超前校正简介 (3)1.3课题研究的目的和意义 (4)1.4本课题研究的主要内容 (4)2.系统校正 (5)2.1已知条件及要求 (5)2.2对系统进行分析 (5)2.2.1当串联一个零点时 (7)2.2.2串联一个具有零点性质的零极点对 (8)2.2.3串联一个具有两个零点,一个极点的控制器时 (9)2.2.4当串联具有零点性质的两个极点,一个零点的控制器时 (10)2.2.5串联更复杂的具有零点性质的控制器 (11)3.总结 (13)4.致谢 (13)5.参考文献 (14)摘要根轨迹法是一种直观的图解方法,它显示了当系统某一参数(通常为增益)从零变化到无穷大时,如何根据开环极点和零点的位置确定全部闭环极点位置。
从根轨迹图可以看出,只调整增益往往不能获得所希望的性能。
事实上,在某些情况下,对于所有的增益,系统可能都是不稳定的。
因此,必须改造系统的根轨迹,使其满足性能指标。
利用根轨迹法对系统进行超前校正的基本前提是:假设校正后的控制系统有一对闭环主导极点,这样系统的动态性能就可以近似地用这对主导极点所描述的二阶系统来表征。
因此在设计校正装置之前,必须先把系统时域性能的指标转化为一对希望的闭环主导极点。
通过校正装置的引入,使校正后的系统工作在这对希望的闭环主导极点处,而闭环系统的其它极点或靠近某一个闭环零点,或远离s平面的虚轴,使它们对校正后系统动态性能的影响最小。
是否采用超前校正可以按如下方法进行简单判断:若希望的闭环主导极点位于校正前系统根轨迹的左方时,宜用超前校正,即利用超前校正网络产生的相位超前角,使校正前系统的根轨迹向左倾斜,并通过希望的闭环主导极点。
用根据轨迹法进行超前校正的一般步骤为:1)根据对系统静态性能指标和动态性能指标的要求,分析确定希望的开环增益和闭环主导极点的位置。
2)画出校正前系统的根轨迹,判断希望的主导极点位于原系统的根轨迹左侧,以确定是否应加超前校正装置。
3)根据题目要求解出超前校正网络在闭环主导极点处应提供的相位超前角。
4)根据图解法求得G c(s)的零点和极点,进而求出校正装置的参数。
5)画出校正后系统的根轨迹,校核闭环主导极点是否符合设计要求。
本文在进行根轨迹超前校正时应用了MATLAB,MATLAB的根轨迹方法允许进行可视化设计,具有操作简单、界面直观、交互性好、设计效率高等优点。
早期超前校正器的设计往往依赖于试凑的方法,重复劳动多,运算量大,又难以得到满意的结果。
MATLAB作为一种高性能软件和编程语言,以矩阵运算为基础,把计算、可视化、程序设计融合到了一个简单易用的交互式工作环境中,是进行控制系统计算机辅助设计的方便可行的实用工具。
因此,随着计算机的飞速发展和MATLAB软件的普及,借助MATLAB,通过编写函数和程序,可以容易地设计出超前校正器,避免了繁琐的计算和绘图过程,从而为线性控制系统的设计提供了一种简单有效的途径。
本文将基于根轨迹法设计超前校正器,并给出它的MATLAB实现。
关键词:根轨迹,超前校正,MATLAB绪论1.1课题概述在系统校正中,当性能指标是以时域指标给出时,通常采用根轨迹法对系统进行校正,根轨迹法校正通常超前校正、滞后校正和滞后——超前校正,本文主要介绍根轨迹串联超前校正法。
固有传递函数的闭环特征根在S平面上是有确定点的,由这些点确定的响应性能不好时,需要加以改变。
改变开环放大系数能使闭环特征根沿着根轨迹移动,结果有两种情形:一种情形是开环放大系数在某个数值下或某个取值范围内特征根的分布能够满足系统性能的要求,于是只要调节开环增益就行了;另一情形是根轨迹上没有合乎要求的特征根,这是需要在S平面上先选定一个期望的闭环主导极点,再通过串联合适的校正装置使校正过的根轨迹:1、通过这一点,并且确定开环增益使校正后的一个特征根就是这点;2、其余的特征根比这个特征根远离虚轴,以确保选定的闭环主导极点的地位。
当在系统中配置一个开环零点或具有零点性质的开环零极点对时,可使原根轨迹向左偏移,如若在系统中配置一个极点,或一个具有极点性质的开环零极点对时可使的原根轨迹向右偏移,只要配置的零点或极点或零极点对适当,就可使得期望点成为校正后的闭环主导极点。
根轨迹串联超前校正就是通过串联零点,或具有零点性质的零极点对来实现的。
1.2根轨迹法超前校正简介1948年,伊文斯(W·R·EVANS)提出了直接由系统的开环传递函数确定系统闭环特征根的图解法,即工程上广泛使用的根轨迹法。
利用这一方法可以分析系统的性能,确定系统应有的结构和参数,也可用于校正装置的综合,根轨迹法的基础是系统的传递函数,这一方法仅适用于线性系统。
根轨迹法是一种图解方法,它是古典控制理论中对系统进行分析和综合的基本方法之一。
它描述的是系统某个参数(通常指增益)从零变化到无穷大时的闭环极点的位置变化。
由于根轨迹图直观地描述了系统特征方程的根(即系统的闭环极点)在s平面上的分布,因此,用根轨迹法分析自动控制系统十分方便,特别是对于高阶系统和多回路系统,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。
所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。
这一附加装置称为校正装置。
加入校正装置后使未校正系统的缺陷得到补偿,这就是校正作用。
常用的校正方式有串联校正、反馈校正、前馈校正和复合校正4种。
本文我们所涉及的是超前校正。
超前校正网络:无源超前校正网络的传递函数可写为1()1aTs G s Ts+=+其中a>1,故超前网络的负实零点总是位于其负实极点之右,起到微分作用,a 的值选的越大,则超前网络的微分作用越强。
1.3课题研究的目的和意义在实际工程控制中,往往需要设计一个系统并选择适当的参数以满足性能指标的要求,或对原有系统增加某些必要的元件或环节,使系统能够全面满足性能指标要求,此类问题就称为系统校正与综合,或称为系统设计。
当被控对象给定后,按照被控对象的工作条件被控信号应具有的最大速度和加速度要求等,可以初步选定执行元件的形式、特性和参数。
然后,根据测量精度、抗扰能力、被测信号的物理性质、测量过程中的惯性及非线性度等因素,选择合适的测量变送元件。
在此基础上,设计增益可调的前置放大器与功率放大器。
这些初步选定的元件以及被控对象适当组合起来,使之满足表征控制精度、阻尼程度和响应速度的性能指标要求。
如果通过调整放大器增益后仍然不能全面满足设计要求的性能指标,就需要在系统中增加一些参数及特性可按需要改变的校正装置,使系统能够全面满足设计要求,这就是控制系统设计中的校正问题。
系统设计过程是一个反复试探的过程,需要很多经验的积累。
在某些系统校正中,当所要求的性能指标是以时域指标给出时,则此时应用根轨迹校正法来解决问题就显得比较方便何必要了。
1.4本课题研究的主要内容已知某控制系统的开环传递函数为,当k=0.25时控制以a 为变量的根轨迹,用根轨迹法设计串联超前校正装置,使超调量。
2.2.系统校正系统校正2.1已知条件及要求已知条件:系统的开环传递函数为:,其中k=0.25;要求:控制以a为变量的根轨迹,用根轨迹法设计串联超前校正装置,使超调量,并用matlab仿真出其结果。
2.2对系统进行分析根据所给定的开环传递函数可以用MATLAB作出其初始的根轨迹图:因为是以a为变量的根轨迹,所以所得到的轨迹为广义根轨迹。
经变形后的广义根轨迹方程为:,由MATLAB作出其根轨迹图,输入程序如下:num=[0,1];den=conv([1,1,0.25,0],[0,1]);g=tf(num,den)rlocus(g)hold on所得广义根轨迹图为:图1校正前广义根轨迹校正后使得根轨迹上所有的点都满足其超调量都小于10%,即对任意变化的a 的值,都能满足题目要求。
1、根据要求知要使得校正后系统的超调量小于10%,如若要满足此条件,则首先要满足整个系统是稳定的,即所有的根轨迹必须在虚轴的左侧。
因为根轨迹中极点数与零点数之差大于2,所以得出所有的根轨迹之和应为定值,当零极点数之和为奇数时,总有根轨迹沿着实轴负方向趋向无穷远处,那么必然有根轨迹趋向于实轴正方向无穷远处,即有根轨迹处于虚轴的右侧,即不能够满足题意。
则如若想满足题意,利用根轨迹串联超前校正时,只能串联奇数个零极点。
2、仅仅使得系统满足稳定还不够,还要使其超调量满足小于10%,根据二阶系统时域指标公式:%100%10%e σ=×≤可得到阻尼比:0.59ζ≥;这里取0.625ζ=,则对应的阻尼角:arccos 51οβζ==。
及系统的根轨迹要满足在阻尼比为0.625到1之间。
2.2.1当串联一个零点时即校正后的广义根轨迹方程为:当零点在0到0.5之间取值时,以0.25为例,用MATLAB进行仿真,输入程序:num=[1,0.25];den=conv([1,1,0.25,0],[0,1]);g=tf(num,den)rlocus(g)hold on得到对应的根轨迹为:图2串联一个零点后的根轨迹根轨迹上的点都在虚轴的左侧,系统满足稳定性,但是其渐近线与实轴成90ο,根轨迹上有一部分点超出了0.625ζ=的范围。
所以此种情况满足题意,不可取。
当零点在大于0.5的范围内取值时,以1为例,用MATLAB进行仿真,输入程序:num=[1,1];den=conv([1,1,0.25,0],[0,1]);g=tf(num,den)rlocus(g)hold on得到对应的根轨迹为:图3串联一个零点后的根轨迹同理虽然根轨迹上的点都在虚轴的左侧,系统满足稳定性,但是其渐近线与实轴成90ο,根轨迹上有一部分点超出了0.625ζ=的范围。
所以此种情况同样不满足题意,不可取。
时2.2.2串联一个具有零点性质的零极点对串联一个具有零点性质的零极点对时分析可知当零极点数之和为奇数时,总有根轨迹沿着实轴负方向趋向无穷远处,那么必然有根轨迹趋向于实轴正方向无穷远处,即有根轨迹处于虚轴的右侧,即不能够满足题意。
当串联一个零极点对时,此时零极点数之和正好为奇数,因此不能满足题意。
2.2.3串联一个具有两个零点,一个极点的控制器时即校正后的广义根轨迹方程为:此时极点数与零点数之差为2,则渐近线与实轴的夹角为90ο,与串联一个零点的状况类似,也会有一部分根轨迹不在0.625ζ=与1ζ=之间,因此此种情况也不满足题意。