第六章 自整角机
- 格式:ppt
- 大小:620.50 KB
- 文档页数:38

自整角机工作原理自整角机是一种用于自动测量和修整角度的设备。
它广泛应用于建筑、制造业、航空航天等领域,能够提高工作效率和精度。
本文将介绍自整角机的工作原理和应用。
我们来了解一下自整角机的结构。
自整角机主要由支架、测量装置、控制系统和修整装置组成。
支架是用于固定和支撑整个设备的框架,测量装置用于测量角度,控制系统用于处理测量数据并控制修整装置进行调整。
自整角机的工作原理可以简单地分为三个步骤:测量、分析和修整。
首先,测量装置通过激光、电子传感器或光电传感器等技术测量出待测角度的数值。
测量装置将测量到的数据传输给控制系统进行分析。
控制系统接收到测量数据后,会根据设定的目标角度和精度要求进行分析。
控制系统会计算出待测角度与目标角度之间的差异,并根据差异的大小和方向来判断修整方向。
控制系统会生成修整指令,并将其传输给修整装置。
修整装置根据控制系统的指令进行调整。
修整装置可以是驱动机构、液压装置或电动机等,用于实现对待测物体的调整。
修整装置会根据控制系统的指令,按照设定的修整步骤和修整量对待测物体进行微调或大范围调整,以使待测角度逐渐接近目标角度。
自整角机的工作原理看似简单,但实际上需要精确的测量和控制技术的支持。
测量装置需要具备高精度和高稳定性,以确保测量结果的准确性。
控制系统需要具备强大的计算和分析能力,能够处理大量的测量数据,并根据结果生成修整指令。
修整装置需要具备高精度的运动控制能力,能够按照指令进行微调或大范围调整。
自整角机的应用十分广泛。
在建筑领域,自整角机可以用于测量和修整建筑物的角度,使建筑物的结构更加稳定和均衡。
在制造业中,自整角机可以用于测量和修整零件的角度,以确保产品的质量和精度。
在航空航天领域,自整角机可以用于测量和修整飞行器的角度,以确保飞行器的飞行稳定性和安全性。
自整角机通过测量、分析和修整的过程,能够自动化地测量和修整角度。
它在建筑、制造业、航空航天等领域发挥着重要的作用,提高了工作效率和精度。


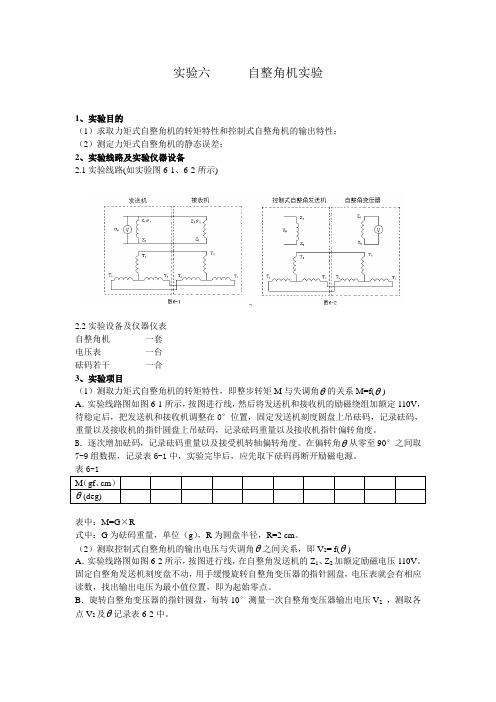
实验六自整角机实验1、实验目的(1)求取力矩式自整角机的转矩特性和控制式自整角机的输出特性;(2)测定力矩式自整角机的静态误差;2、实验线路及实验仪器设备2.1实验线路(如实验图6-1、6-2所示)2.2实验设备及仪器仪表自整角机一套电压表一台砝码若干一合3、实验项目(1)测取力矩式自整角机的转矩特性,即整步转矩M与失调角θ的关系M=f(θ)A.实验线路图如图6-1所示,按图进行线,然后将发送机和接收机的励磁绕组加额定110V,待稳定后,把发送机和接收机调整在0°位置,固定发送机刻度圆盘上吊砝码,记录砝码,重量以及接收机的指针圆盘上吊砝码,记录砝码重量以及接收机指针偏转角度。
B.逐次增加砝码,记录砝码重量以及接受机转轴偏转角度。
在偏转角θ从零至90°之间取7-9组数据,记录表6-1中,实验完毕后,应先取下砝码再断开励磁电源。
表中:M=G×R式中:G为砝码重量,单位(g),R为圆盘半径,R=2 cm。
(2)测取控制式自整角机的输出电压与失调角θ之间关系,即V2= f(θ)A.实验线路图如图6-2所示,按图进行线,在自整角发送机的Z1、Z2加额定励磁电压110V。
固定自整角发送机刻度盘不动,用手缓慢旋转自整角变压器的指针圆盘,电压表就会有相应读数,找出输出电压为最小值位置,即为起始零点。
B.旋转自整角变压器的指针圆盘,每转10°测量一次自整角变压器输出电压V2,测取各点V2及θ记录表6-2中。
表6-2(3)测定力矩式自整角机的静态误差△jtA.在力矩式自整角机系统中,静态协调时,接收机与发送机转子转角之差即静态误差△θjt 以角度表示。
B.实验接线仍为实验图6-1所示。
将发送机和接收机的励磁绕组加额定励磁电压110V,待稳定后,把发送机和接收机调整在0°位置,缓慢旋转发送机刻度盘,每转过20°测取接收机实际转过的角度并记录表6-3中。
表6-3注意:接收机转角超前为正误差,滞后为负误差,正、负最大误差绝对值之和的一半为力矩式接收机的静态误差。

第六章6.1 有一台交流伺服电动机,若加上额定电压,电源频率为50Hz,极对数P=1,试问它的理想空在转速是多少?n0=60*f/p=60*50/1=3000r/min理想空在转速是3000 r/min6.2何谓“自转”现象?交流伺服电动机时怎样克服这一现象,使其当控制信号消失时能迅速停止?自转是伺服电动机转动时控制电压取消,转子利用剩磁电压单相供电,转子继续转动.克服这一现象方法是把伺服电动机的转子电阻设计的很大,使电动机在失去控制信号,即成单相运行时,正转矩或负转矩的最大值均出现在Sm>1的地方.当速度n 为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电似的电磁转矩的方向总是与转子转向相反,所以是一个制动转矩.可使转子迅速停止不会存在自转现象6.3有一台直流伺服电动机,电枢控制电压和励磁电压均保持不变,当负载增加时,电动机的控制电流、电磁转矩和转速如何变化?当副在增加时, n=U c/K eΦ-RT/K e K tΦ2电磁转矩增大,转速变慢,根据n=U c/K eΦ-R a I a/K e Φ控制电流增大.6.4有一台直流伺服电动机,当电枢控制电压Uc=110V时,电枢电流I a1=0.05A,转速n1=3000r/min;加负载后,电枢电流I a2=1A, 转速n2=1500r/min。
试做出其机械特性n=f (T)。
电动机的电磁转矩为T=BI a NLD/2,n300015000.05A6.5n0=3000r/min;当n0=120Uc/πNBLD6.6细不变,式中的BI a Nl/2紧思维常数,故转矩T与直径D近似成正比.电动机得直径越大力矩就越大.6.7 为什么多数数控机床的进给系统宜采用大惯量直流电动机?因为在设计.制造商保证了电动机能造低速或阻转下运行,在阻转的情况下,能产生足够大的力矩而不损坏,加上他精度高,反应快,速度快线性好等优点.因此它常用在低俗,需要转矩调节和需要一定张力的随动系统中作为执行元件.6.8 永磁式同步电动机为什么要采用异步启动?因为永磁式同步驶电动机刚启动时,器定子长生旋转磁场,但转子具有惯性,跟不上磁场的转动,定子旋转时而吸引转子,时而又排斥转子,因此作用在转子的平均转矩为零,转子也就旋转不起来了.6.9 磁阻式电磁减速同步电动机有什么突出的优点?磁阻式电磁减速同步电动机无需加启动绕组,它的结构简单,制造方便.,成本较低,它的转速一般在每分钟几十转到上百专职践踏是一种常用的低速电动机.6.10 一台磁组式电磁减速同步电动机,定子齿数为46,极对数为2,电源频率为50Hz,转子齿数为50,试求电机的转速。

自整角机工作原理自整角机是一种常见的工业机械设备,它的工作原理是通过机械结构以及电子控制系统的配合,实现对金属材料进行整形加工的过程。
本文将从机械结构和电子控制系统两个方面来详细介绍自整角机的工作原理。
一、机械结构自整角机的机械结构主要包括机架、辊子、定位装置和压力系统等部分。
机架是整个设备的基础,承载着整个设备的工作负荷。
辊子是自整角机的关键部件,用于将金属材料进行整形加工。
定位装置的作用是确保金属材料的精确定位,以保证加工的准确性。
压力系统则用于提供加工所需的压力,保证整个加工过程的顺利进行。
自整角机的工作过程中,金属材料首先通过定位装置进行精确定位,然后被辊子夹紧。
接下来,压力系统提供所需的压力,使辊子对金属材料施加一定的力,使其发生塑性变形。
辊子的旋转运动将金属材料逐渐弯曲成所需的角度。
整个加工过程中,机架保持稳定,以确保加工的精度和质量。
二、电子控制系统自整角机的电子控制系统主要包括PLC控制器、传感器和执行器等部分。
PLC控制器是整个系统的大脑,通过程序控制各个执行器的动作,实现对整个加工过程的控制。
传感器用于实时检测加工过程中的各种参数,如金属材料的位置、角度、压力等,将这些信息传输给PLC控制器。
执行器则根据PLC控制器的指令,控制机械结构的运动,实现加工过程的自动化。
自整角机的工作过程中,PLC控制器根据预设的程序,通过传感器实时获取金属材料的位置和角度等信息。
根据这些信息,PLC控制器计算出所需的辊子的运动轨迹和压力大小,并通过执行器控制辊子的运动和压力的施加,实现对金属材料的整形加工。
整个过程中,PLC控制器可以根据需要进行参数的调整,以适应不同的加工要求。
自整角机的工作原理是通过机械结构和电子控制系统的配合,实现对金属材料进行整形加工的过程。
机械结构通过辊子、定位装置和压力系统等部分,实现金属材料的夹紧、塑性变形和加工角度的控制。
电子控制系统通过PLC控制器、传感器和执行器等部分,实现对加工过程的自动化控制。
控制电机(2版)思考题与习题参考答案(机械工业出版社,李光友等编着)第1章 直流伺服电动机1. 一台直流电动机,其额定电压为110V ,额定电枢电流为0.4A ,额定转速为3600r/min ,电枢电阻为50Ω,空载阻转矩015.0T 0=N ·m ,试问电动机的额定负载转矩是多少?解:,=120,2. 一台型号为55SZ54的直流伺服电动机,其额定电压为110V ,额定电枢电流为0.46A ,额定转矩为093.0 N ·m ,额定转速为3000r/min 。
忽略电动机本身的空载阻转矩0T ,试求电机在额定运行状态时的反电动势a E 和电枢电阻a R 。
解:U= , , 1003. 伺服电动机型号为70SZ54,,V 110U U ,W 55P f N N ===效率m i n /r 3000n %,5.62N N ==η,空载阻转矩0714.0T 0= N ·m 。
试求额定运行时电动机的电枢电流aN I ,电磁转矩e T ,反电动势aN E 和电枢电阻a R 。
解:100,4. 由两台完全相同的直流电机组成的电动机-发电机组。
它们的励磁电压均为110V,电枢绕组电阻均为75Ω。
当发电机空载时,电动机电枢加110V电压,电枢电流为0.12A,机组的转速为4500r/min。
试求:(1)发电机空载时的输出电压为多少?(2)电动机仍加110V电压,发电机负载电阻为1kΩ时,机组的转速为多少?解:(1)(2)由得,, =0.12A, n=4500r/min.接负载时,U=,解得=4207r/min5. 试用分析电枢控制时的类似方法,推导出电枢绕组加恒定电压,而励磁绕组加控制电压时直流伺服电动机的机械特性和调节特性。
并说明这种控制方式有哪些缺点?答:磁场控制时电枢电压保持不变。
机械特性是指励磁电压不变时电动机转速随电磁转矩变化的关系,即 = 。
由公式可知,当控制电压加载励磁绕组上,即采用磁场控制时,随着控制信号减弱,减小,k增大,机械特性变软。