控制电机(第四版) 第5章 自整角机
- 格式:ppt
- 大小:3.50 MB
- 文档页数:8
第二章1.为什么直流发电机电枢绕组元件的电势是交变电势而电刷电势是直流电势? 答:电枢连续旋转,导体ab和cd轮流交替地切割N极和S极下的磁力线,因而ab和cd中的电势及线圈电势是交变的。
由于通过换向器的作用,无论线圈转到什么位置,电刷通过换向片只与处于一定极性下的导体相连接,如电刷A始终与处在N极下的导体相连接,而处在一定极性下的导体电势方向是不变的,因而电刷两端得到的电势极性不变,为直流电势。
2. 如果图 2 - 1 中的电枢反时针方向旋转,试问元件电势的方向和A、 B电刷的极性如何?答:在图示瞬时,N极下导体ab中电势的方向由b指向a,S极下导体cd中电势由d指向c。
电刷A通过换向片与线圈的a端相接触,电刷B与线圈的d端相接触,故此时A电刷为正,B电刷为负。
当电枢转过180°以后,导体cd处于N极下,导体ab处于S极下,这时它们的电势与前一时刻大小相等方向相反,于是线圈电势的方向也变为由a到d,此时d为正,a为负,仍然是A刷为正,B刷为负。
4. 为什么直流测速机的转速不得超过规定的最高转速? 负载电阻不能小于给定值? 答:转速越高,负载电阻越小,电枢电流越大,电枢反应的去磁作用越强,磁通被削弱得越多,输出特性偏离直线越远,线性误差越大,为了减少电枢反应对输出特性的影响,直流测速发电机的转速不得超过规定的最高转速,负载电阻不能低于最小负载电阻值,以保证线性误差在限度的范围内。
而且换向周期与转速成反比,电精心整理精心整理机转速越高,元件的换向周期越短;eL 正比于单位时间内换向元件电流的变化量。
基于上述分析,eL 必正比转速的平方,即eL ∝n2。
同样可以证明ea ∝n2。
因此,换向元件的附加电流及延迟换向去磁磁通与n2成正比,使输出特性呈现非线性。
所以,直流测速发电机的转速上限要受到延迟换向去磁效应的限制。
为了改善线性度,采用限制转速的措施来削弱延迟换向去磁作用,即规定了最高工作转速。
控制电机5 章章第第 5自整角机5.1 自整角机概述5.2 自整角机的基本结构5.3 自整角机的工作原理和基本特点5.5 自整角机的应用举例5.4 自整角机主要性能指标和技术数据5.6 力矩式自整角机本章要求:熟练掌握控制式自整角机的工作原理及其工作特点。
掌握控制式自整角机接收机输出绕组的位置、输出绕组电势与失调角的关系。
掌握力矩式自整角机的工作特点、静态整步转矩与失调角的关系、比整步转矩等。
掌握自整角发送机与接收机成对使用的特点,了解自整角机的应用。
5.1 概概 述述自整角机是自动控制系统中的同步元件。
利用两台或多台自整角机在电路上的联系,可以使相隔一定距离、机械上互不连接的两根或多根转轴保持同步旋转或产生相同的转角变化。
与发送轴(即主动轴)耦合的自整角机称为发送机;与接收轴(即被动轴)耦合的自整角机称为接收机。
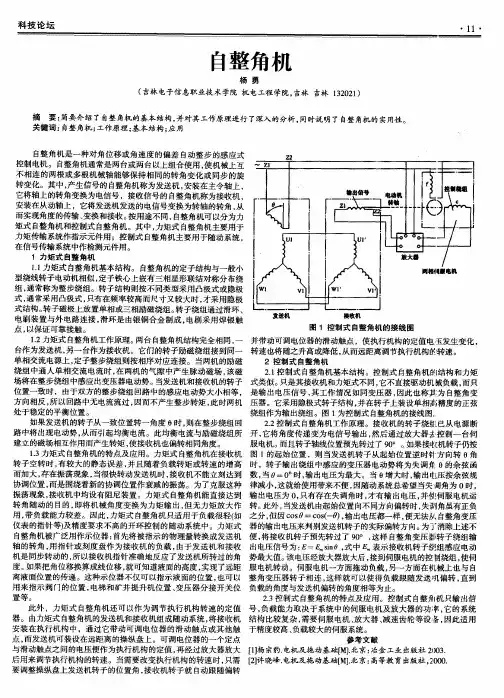
21变速器前置放大器信号处理直流放大器可控硅控制线路电源雷达雷达接收器测速发电机直流伺服电动机自整角机发送机手轮αβ功率变换器接收机自整角机按其使用要求不同,可分为控制式自整角机和力矩式自整角机。
控制式自整角接收机输出的是与两轴转角差成一定关系的电压,该电压控制交流伺服电动机去带动被动轴旋转,故能带动较大负载。
由于接收机工作在变压器状态,故通常称为自整角变压器。
力矩式接收机直接输出力矩并带动负载,但带载能力差,只能带动指针、刻度盘等轻负载,常用于角度传输精度要求不很高的指示系统中。
自整角机按结构形式不同可分为接触式和无接触式两大类。
雷达高低角自动显示系统原理图1. 自整角接收机2. 自整角发送机3. 交流伺服电动机4. 放大器5. 刻度盘6. 减速器<U~U j ~123456αβE 2雷达高低角系统是如何进行工作的?思考:自整角机工作录象控制电机θ1 ~U jZ 1 Z 2 D 1 D 2D 3 5.2 自整角机的基本结构自整角机的基本结构定子:铁心,三相对称绕组;接成Y 。
转子:铁心,单相绕组。
第二章1.为什么直流发电机电枢绕组元件的电势是交变电势而电刷电势是直流电势?答:电枢连续旋转,导体ab和cd轮流交替地切割N极和S极下的磁力线,因而ab和cd中的电势及线圈电势是交变的。
由于通过换向器的作用,无论线圈转到什么位置,电刷通过换向片只与处于一定极性下的导体相连接,如电刷A始终与处在N极下的导体相连接,而处在一定极性下的导体电势方向是不变的,因而电刷两端得到的电势极性不变,为直流电势。
2. 如果图 2 - 1 中的电枢反时针方向旋转,试问元件电势的方向和A、 B 电刷的极性如何?答:在图示瞬时,N极下导体ab中电势的方向由b指向a,S极下导体cd 中电势由d指向c。
电刷A通过换向片与线圈的a端相接触,电刷B与线圈的d端相接触,故此时A电刷为正,B电刷为负。
当电枢转过180°以后,导体cd处于N极下,导体ab处于S极下,这时它们的电势与前一时刻大小相等方向相反,于是线圈电势的方向也变为由a到d,此时d为正,a为负,仍然是A刷为正,B刷为负。
4. 为什么直流测速机的转速不得超过规定的最高转速? 负载电阻不能小于给定值?答:转速越高,负载电阻越小,电枢电流越大,电枢反应的去磁作用越强,磁通被削弱得越多,输出特性偏离直线越远,线性误差越大,为了减少电枢反应对输出特性的影响,直流测速发电机的转速不得超过规定的最高转速,负载电阻不能低于最小负载电阻值,以保证线性误差在限度的范围内。
而且换向周期与转速成反比,电机转速越高,元件的换向周期越短;eL正比于单位时间内换向元件电流的变化量。
基于上述分析,eL必正比转速的平方,即eL∝n2。
同样可以证明ea∝n2。
因此,换向元件的附加电流及延迟换向去磁磁通与n2成正比,使输出特性呈现非线性。
所以,直流测速发电机的转速上限要受到延迟换向去磁效应的限制。
为了改善线性度,采用限制转速的措施来削弱延迟换向去磁作用,即规定了最高工作转速。
5. 如果电刷通过换向器所连接的导体不在几何中性线上,而在偏离几何中性线α角的直线上,如图 2 - 29 所示,试综合应用所学的知识,分析在此情况下对测速机正、反转的输出特性的影响。
第二章1.为什么直流发电机电枢绕组元件的电势是交变电势而电刷电势是直流电势?答:电枢连续旋转,导体ab和cd轮流交替地切割N极和S极下的磁力线,因而ab和cd中的电势及线圈电势是交变的。
由于通过换向器的作用,无论线圈转到什么位置,电刷通过换向片只与处于一定极性下的导体相连接,如电刷A始终与处在N极下的导体相连接,而处在一定极性下的导体电势方向是不变的,因而电刷两端得到的电势极性不变,为直流电势。
2. 如果图 2 - 1 中的电枢反时针方向旋转,试问元件电势的方向和A、 B电刷的极性如何?答:在图示瞬时,N极下导体ab中电势的方向由b指向a,S极下导体cd中电势由d指向c。
电刷A通过换向片与线圈的a端相接触,电刷B与线圈的d端相接触,故此时A电刷为正,B电刷为负。
当电枢转过180°以后,导体cd处于N极下,导体ab处于S极下,这时它们的电势与前一时刻大小相等方向相反,于是线圈电势的方向也变为由a到d,此时d为正,a为负,仍然是A刷为正,B刷为负。
4. 为什么直流测速机的转速不得超过规定的最高转速? 负载电阻不能小于给定值?答:转速越高,负载电阻越小,电枢电流越大,电枢反应的去磁作用越强,磁通被削弱得越多,输出特性偏离直线越远,线性误差越大,为了减少电枢反应对输出特性的影响,直流测速发电机的转速不得超过规定的最高转速,负载电阻不能低于最小负载电阻值,以保证线性误差在限度的范围内。
而且换向周期与转速成反比,电机转速越高,元件的换向周期越短;eL正比于单位时间内换向元件电流的变化量。
基于上述分析,eL必正比转速的平方,即eL∝n2。
同样可以证明ea∝n2。
因此,换向元件的附加电流及延迟换向去磁磁通与n2成正比,使输出特性呈现非线性。
所以,直流测速发电机的转速上限要受到延迟换向去磁效应的限制。
为了改善线性度,采用限制转速的措施来削弱延迟换向去磁作用,即规定了最高工作转速。
5. 如果电刷通过换向器所连接的导体不在几何中性线上,而在偏离几何中性线α角的直线上,如图 2 - 29 所示,试综合应用所学的知识,分析在此情况下对测速机正、反转的输出特性的影响。

第二章 伺服电动机与伺服系统(P.47)2-2 若直流伺服电动机的励磁电压下降,对电动机机械特性和调节特性会有哪些影响? 答:不考虑电机磁路饱和并忽略带负载时电枢反应的影响时,励磁磁通正比于励磁电压,则励磁电压下降将使励磁磁通同步下降。
所以,根据理想空载转速、堵转转矩和机械特性斜率表达式Φ=e a C U n 0、aa T d R U C T Φ=、20tan Φ===T e a d C C R T n k α可知,伴随励磁电压下降,机械特性理想空载转速将变大,堵转转矩将变小,机械特性斜率将变大,特性将变软;同理,根据调节特性和始动电压表达式l T e a e a T C C R C U n 2Φ-Φ=、l T a a T C R U Φ=可知,伴随励磁电压下降,调节特性的斜率和始动电压都将变大。
2-4 为什么两相伺服电动机的转子电阻要设计的相当大?若转子电阻过大,对电机的性能会产生哪些不利影响?答:两相伺服电动机的转子电阻要设计的相当大的原因:1) 可以增大电机调速范围;2) 可以使电机的机械特性更接近线性;3) 可以消除电机自转现象,因为转子电阻足够大时,电动机转子在脉振磁场作用下的合成电磁转矩始终是制动转矩。
若转子电阻过大,会降低起动转矩,并导致机械特性变软;使更多的能量消耗在电阻上,电机发热大,且响应快速性变差。
2-6若已知一台直流伺服电动机的转动惯量J ,如何根据电机的机械特性估算出电机的机电时间常数? 答:da a T e a T e a m T Jn R U C C JU C C JR 602/60)/(260202πππτ=ΦΦ=Φ=。
可见,已知电动机的转动惯量J 时,再根据机械特性求得n 0和T d 之比即可求得机电时间常数m τ。
2-7 一台直流伺服电动机,其电磁转矩为0.2倍额定电磁转矩时,测得始动电压为4V ,并当电枢电压U a =49V 时,电机转速为1500r/min 。
自动控制元件 部分课后题答案第一章 直流伺服电动机1-1直流伺服电动机的电磁转矩和控制电流由什么决定?答:a :由T em =C m ΦI a 知电磁转矩由每极磁通量和绕组电流大小决定。
b :由T em =T 0 +T 2 =CmΦIa 控制电流由负载转矩(T 2)和空载转矩(T 0)大小决定。
1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化?为什么?答:a :电磁转矩T em =T 0 +T 2可见电磁转矩也不变。
由T em =C m ΦI a 知控制电流I a 也不变b :KeKtRaTem Ke Ua n -=知T em 不变可见U a 转速升高理想空载转速变大导致转速n 升高。
1-3已知一台直流电动机,其电枢额定电压Ua=110V ,额定运行时电枢电流Ia=0.4A ,转速n=3600rpm ,它的电枢电阻Ra=50欧姆,负载阻转矩To=15mN.m 。
试问该电动机额定负载转矩是多少?答:Ea= Ua- IaRa=110-0.4×50=90VEa=Ce Φn, Ce=0.105Cm Cm Φ=0.23836000.10590n 105.0=⨯=⨯Ea T em =T 0 +T 2=CmΦIa→T 2=CmΦIa -T 0 =0.40.238=0.0952-15×10-3=80.2mN.m 1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化?并说明由原来的状态到新的稳态的物理过程。
答:磁转矩T em =T 0 +T 2可见T 2 ↓电磁转矩也↓。
由T em =C m ΦI a 知控制电流I a ↓Ea= Ua- IaRa 可见I a ↓知Ea↑,由Ea=Ce Φn 知Ea↑知n ↑第二章 直流测速发电机2-4某直流测速发电机,其电枢电压U=50V ,负载电阻R L =3000Ω,电枢电阻Ra=180Ω,转速n=3000rpm ,求该转速下的空载输出电压Uo 和输出电流Ia 。