第三章:伺服系统传递函数的建立
- 格式:ppt
- 大小:1.76 MB
- 文档页数:43

伺服阀传递函数1伺服阀的介绍伺服阀是一种用于流体控制的设备,可以通过根据输入信号控制输出属性来实现精确的流量或压力控制。
伺服阀通常带有内置或外置的传感器,可以检测输出信号并自动调整其工作状态以达到所需的控制效果。
由于其高精度、高可靠性和良好的自适应性能,伺服阀在工业自动化、航空航天、卫星导航、汽车制造等领域都得到了广泛应用。
2伺服阀的传递函数在控制系统中,传递函数可以用来描述输入信号和输出信号之间的关系。
在伺服阀中,传递函数也有着重要的作用。
伺服阀的传递函数可以描述输入信号(比如电流信号)和输出信号(比如阀芯的开度或流量)之间的关系。
对于伺服阀的控制和优化,传递函数也是必不可少的工具。
伺服阀的传递函数通常可以表示为以下形式:G(s)=K/(1+Ts)其中G(s)是伺服阀的传递函数,s是复频域变量,K和T分别是控制器的增益和时间常数。
这里的时间常数T通常指的是阀芯的动态响应时间,即从输入信号变化到阀芯完全打开或关闭所需的时间。
在传递函数的分母中,1+Ts表示伺服阀的惯性滞后因素,它可以反映伺服阀的惯性和滞后特性。
3伺服阀的开环传递函数和闭环传递函数伺服阀的传递函数可以分为开环传递函数和闭环传递函数。
开环传递函数是指在没有反馈的情况下,输入信号与输出信号之间的传递函数。
开环传递函数通常比较简单,但是由于没有反馈调节,容易受到干扰和变化的影响,对伺服阀的控制精度和稳定性有一定的限制。
闭环传递函数是指在有反馈调节的情况下,输入信号与输出信号之间的传递函数。
闭环传递函数通常比开环传递函数更加复杂,但是可以通过反馈调节来提高控制精度和稳定性,对伺服阀的控制效果更好。
4伺服阀传递函数的应用伺服阀的传递函数可以用来设计、分析和优化伺服系统。
在伺服系统的设计过程中,传递函数可以作为控制器的设计依据,可以根据系统的要求和传递函数的特性,选择合适的控制器类型和参数。
在系统的分析和优化过程中,传递函数可以用来评估系统的性能和稳定性,可以通过对传递函数的分析来优化系统的结构和参数。

伺服电机计算完整版伺服电机是一种可以实现高精度运动控制的电机。
它采用了闭环控制系统,通过反馈信号不断调整输出,以实现对位置、速度和加速度的精确控制。
伺服电机在自动化控制、工业机械、机器人等领域有着广泛的应用。
伺服电机的运动控制可以通过数学模型来描述。
一般情况下,可以将伺服电机的运动控制建模为一个二阶系统。
在建立数学模型之前,需要了解一些关键参数,包括电机的转矩常数Kt、电机的动态阻尼比ζ、滤波器的角频率ωn以及PID控制器的增益参数Kp、Ki和Kd。
伺服电机的数学模型可以用以下差分方程来描述:Tm*(θm(k+1)-θm(k))/T=Kt*(Ti/R)*Vi(k)-Td*(θm(k)-θ(k))J*(θ(k+1)-2θm(k)+θ(k-1))/T^2=T*(θm(k+1)-θm(k))/T其中,Tm为电机的转矩,θm(k)为电机的角度,Vi(k)为控制输入,Ti和R分别为电机的转矩常数和电阻,Td为电机的动态阻尼比,J为负载的转动惯量,θ(k)为负载的角度,T为采样周期。
根据以上差分方程,可以推导得到伺服电机的传递函数:G(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))可以根据传递函数来设计伺服电机的控制器。
一种常见的控制器设计方法是PID控制,它是通过对误差进行比例、积分和微分处理来调整输出。
PID控制器的输出可以表示为:U(s)=Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s)其中,U(s)为控制器的输出,Kp、Ki和Kd分别为比例、积分和微分增益参数,e(s)为误差信号,s为Laplace变换中的频率变量。
通过将传递函数和控制器的输出进行连接,可以得到整个系统的传递函数:T(s)=G(s)*U(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))*(Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s))根据传递函数T(s),可以进行系统的频域和时域分析,以评估系统的稳定性和动态性能。


伺服阀传递函数伺服阀是一种常用的流量控制装置,广泛应用于工业自动化领域。
伺服阀的传递函数描述了其输入和输出之间的关系,是研究和设计伺服阀系统的重要工具。
本文将详细介绍伺服阀传递函数的概念、特性和应用。
一、传递函数的定义和表示伺服阀传递函数是描述伺服阀系统输入和输出之间关系的数学模型。
传递函数通常用一个分子多项式除以一个分母多项式的比值来表示。
例如:G(s) = Y(s)/X(s)其中,G(s)是传递函数,Y(s)是系统的输出,X(s)是系统的输入,s 是拉普拉斯变量。
传递函数可以是一个标量,也可以是一个向量,具体取决于系统的维度。
二、传递函数的特性1. 零点和极点:传递函数中的分子多项式和分母多项式的根分别被称为零点和极点。
它们决定了传递函数的稳定性和响应特性。
2. 频率响应:传递函数可以通过频率响应来描述系统对不同频率输入的响应程度。
频率响应可以用幅频特性和相频特性来表示。
3. 稳定性:传递函数的极点决定了系统的稳定性。
当所有极点的实部小于零时,系统是稳定的。
4. 阶数:传递函数的阶数等于分子多项式和分母多项式的最高次幂的差。
阶数越高,系统的复杂性越大。
三、传递函数的应用1. 控制系统设计:传递函数可以帮助工程师设计和调整控制系统,使系统的响应满足要求。
通过调整传递函数的零点和极点,可以改变系统的稳定性和响应速度。
2. 系统分析:传递函数可以用来分析系统的稳定性、频率响应和阶跃响应等特性。
通过对传递函数进行数学推导和仿真分析,可以预测系统的性能和行为。
3. 滤波器设计:传递函数可以用来设计和分析滤波器,实现信号的滤波和频率选择。
4. 传感器校准:传递函数可以用来校准传感器,将传感器的输出与实际物理量之间建立准确的关系。
四、总结伺服阀传递函数是描述伺服阀系统输入和输出之间关系的重要数学模型。
它的特性和应用广泛,可以用于控制系统设计、系统分析、滤波器设计和传感器校准等领域。
通过深入理解和应用传递函数,可以提高工程师对伺服阀系统的认识和掌握,从而实现更好的控制和优化。
伺服驱动系统原理
伺服驱动系统的工作原理主要包含以下几个步骤:
1. 输入信号处理:伺服驱动系统接收来自控制器的输入信号,这些信号通常是模拟或数字信号。
输入信号经过处理后将传递给驱动器。
2. 反馈信号采集:伺服驱动系统通过反馈装置采集伺服电机的位置或速度信息。
这些反馈信号将用于控制伺服电机的运动。
3. 误差计算:伺服驱动系统将输入信号和反馈信号进行比较,计算出误差。
误差是控制器用来调整驱动器输出信号的基础。
4. 功率驱动单元:功率驱动单元通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。
再通过三相正弦PWM电压型逆变器变频来驱动交流伺服电机。
这个过程可以简单的理解为AC-DC-AC的过程。
5. 控制方式:伺服驱动器一般都有三种控制方式:位置控制方式、转矩控制方式、速度控制方式。
总的来说,伺服驱动系统是一个非常复杂的系统,其工作原理涉及多个环节和步骤。
如需了解更多信息,建议查阅相关文献或咨询专业人士。
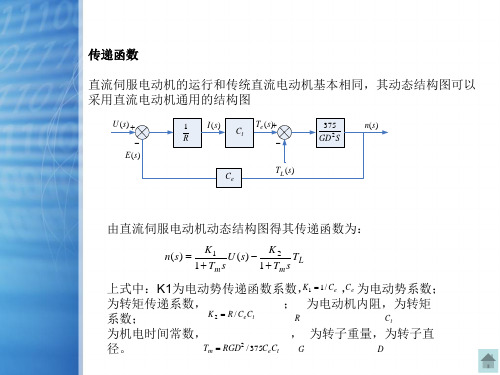
直流伺服控制系统的数学模型
直流伺服控制系统的数学模型可以描述为一个单输入单输出的控制系统,其中输出信号为电机角位置或角速度,输入信号为电机的电压。
系统的基本元素为直流电机,功率放大器,编码器和反馈环路。
系统的传递函数可以表示为:
G(s) = \frac{K}{s(JLs + bJ + K^2)}
其中,K为电机增益系数,J为电机惯性矩,L为电机电感,b为电机摩擦系数,K为电机电动势常数。
将输入信号表示为U(s),输出信号表示为\theta(s),则系统的闭环传递函数可以表示为:
\frac{\theta(s)}{U(s)} = \frac{K}{s^2(JLs + bJ + K^2) + K^2}
为了使系统稳定,需要设计合适的控制器增益。
常用的控制方法包括PID控制、模型预测控制等。
总之,直流伺服控制系统的数学模型可以用传递函数表示,通过设计合适的控制器增益实现稳定的控制。