第四章虚位移原理习题解答
- 格式:pdf
- 大小:141.19 KB
- 文档页数:6

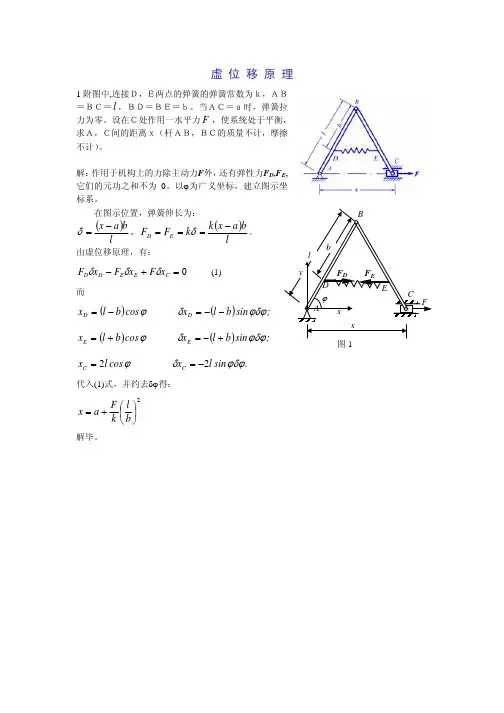
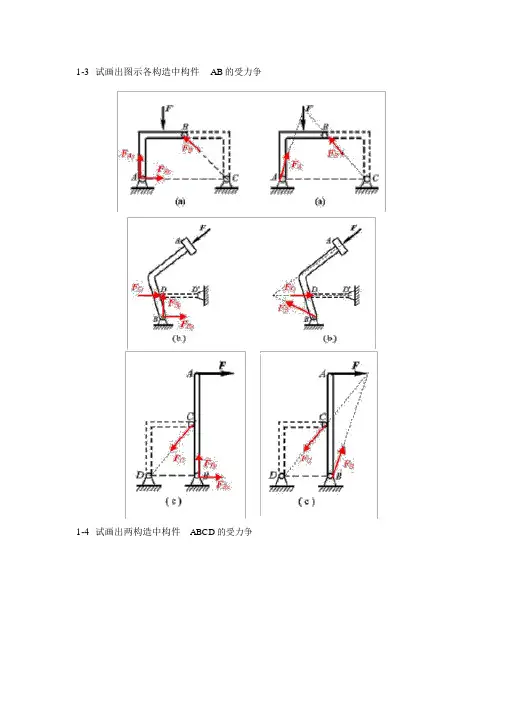
1-3 试画出图示各构造中构件AB的受力争1-4 试画出两构造中构件ABCD的受力争1-5 试画出图 a 和 b 所示刚系统整体各个构件的受力争1-5a1-5b1- 8 在四连杆机构的ABCD的铰链 B 和 C上分别作用有力F1和 F2,机构在图示位置均衡。
试求二力F1和 F2之间的关系。
解:杆 AB,BC, CD为二力杆,受力方向分别沿着各杆端点连线的方向。
解法 1( 分析法 )假定各杆受压,分别选用销钉 B 和 C 为研究对象,受力以下图:yyFBCC xB Fo45BCx30o o F60F2CDF AB F1由共点力系均衡方程,对 B 点有:F x0F2F BC cos4500对 C点有:F x0FBC F1 cos3000解以上二个方程可得:F12 6F2 1.63F23解法 2( 几何法 )分别选用销钉 B 和 C 为研究对象,依据汇交力系均衡条件,作用在 B 和C 点上的力构成关闭的力多边形,以下图。
F F2BCF AB o30o45CD60oFF BC F1对 B 点由几何关系可知:F2F BC cos450对 C 点由几何关系可知:F BC F1 cos300解以上两式可得:F1 1.63F22-3 在图示构造中,二曲杆重不计,曲杆AB 上作用有主动力偶 M。
试求 A 和 C 点处的拘束力。
解: BC为二力杆 ( 受力以下图 ) ,故曲杆 AB 在 B 点处遇到拘束力的方向沿BC 两点连线的方向。
曲杆AB遇到主动力偶M的作用, A 点和 B 点处的拘束力一定构成一个力偶才能使曲杆AB保持均衡。
AB受力以下图,由力偶系作用下刚体的均衡方程有(设力偶逆时针为正):M0 F A10a sin(450 )M 0F A0.354Ma此中:tan 1。
对 BC杆有:F C FB F A0.354M 3aA,C两点拘束力的方向以下图。
2-4解:机构中 AB杆为二力杆,点A,B 出的拘束力方向即可确立。
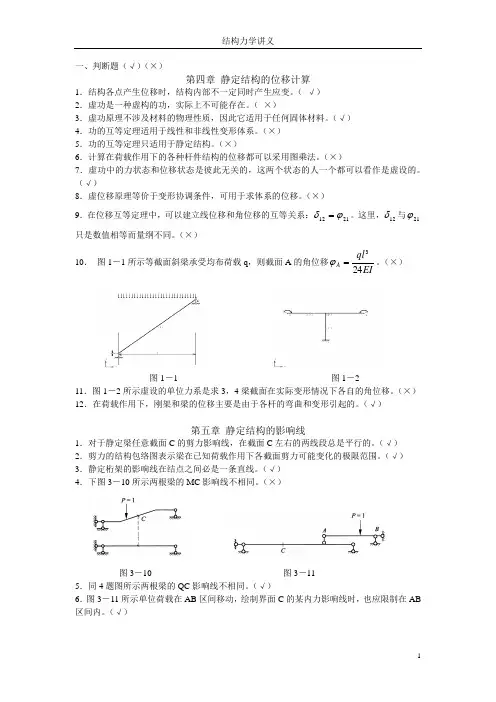
《结构力学习题》(含答案解析)-CAL-FENGHAI.-(YICAI)-Company One120 第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
Aa a21 9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
静定结构的位移计算习题4—1 (a)用单位荷载法求图示结构B 点的水平位移解:1. 设置虚拟状态选取坐标如图。
2. M P 图和 如图示3. 虚拟状态中各杆弯矩方程为实际状态中各杆弯矩方程为M P =F P x4. 代入公式(4—6)得 △BH =l实际状态1虚拟状态5F P l 15l M P 图图M 图M xM =141012118111EI F EI x F x EI x F x EI dx M M P l l P l P P =⨯⨯+⨯⨯=∑⎰⎰⎰(←)4—1 (b)单位荷载法求图示刚架B 点的水平位移 解:1. 设置虚拟状态选取坐标如图。
2. M P 图和 如图示3. 虚拟状态中各杆弯矩方程为 BD: DC: CA: 实际状态中各杆弯矩方程为 BD: M P =0 DC: M P =40x CA: M P =160+5x 24. 代入公式(4—6)得图M x M =3=M xM-=3△BH =4—2试求图示桁架结点B 的竖向位移,已知桁架各杆的EA =21×104KN 。
1M P 图M 3KN •m340KN •m3KN •m3KN •m)(833.05160)3(40306012401301←=+⨯-+⨯+*=∑⎰⎰⎰⎰cm EI x x x EI x EI x EI dxM M P实际状态虚拟状态解:虚拟状态如图示。
实际状态和虚拟状态所产生的杆件内力均列在表4—1中,根据式4—7可得结点B的竖向位移为表4—1中)(768.010215.16124↓=⨯∙=∆cm KNm KN BV4—3 (a)、(b)试用图乘法求图示结构B 处的转角和C 处的竖向位移。
EI=常数。
M=ql 2M P 图ql 2/81M=1(a )解:M P 图、单位力偶下作用于B 点的1M 图、单位力下作用于C 点的2M 图EIql ql l ql l EI B 3)21223232221(1222=⨯⨯⨯-⨯⨯⨯=ϕ( )(b )解:M P 图、单位力偶下作用于B 点的1M 图、单位力作用于C 点的2M 图)2183232421(122⨯⨯⨯-⨯⨯⨯=ql l l ql EI B ϕ=ql 3/24EI( ))23242212832232421(1222ql ql l ql ql l ql l ql EI cv ⨯⨯⨯⨯+⨯⨯⨯-⨯⨯⨯⨯=∆)(24)2852232322213221(14222↑-=⨯⨯⨯⨯⨯+⨯⨯⨯-⨯⨯⨯-=∆EI qll ql l ql l l ql l l EI CV= ql4/24EI(↓)(b)ql/2ql2/4l/2(C )解:M P 图、单位力偶作用于B 点的1M 图、单位力作用于C 点时的2M 图EIl F lF ll EI P P B 12231211322121(12=⨯⨯⨯⨯+⨯⨯⨯⨯-=ϕ( )ll)(12231212232221(12↓=⨯⨯⨯⨯+⨯⨯⨯⨯⨯-=∆EIl F lF l l l F l l EI P P P cv 4—4 (a )试求图示结构C 点的竖向位移。
7-1. 在图示机构中,曲柄OA 上作用一力偶,其矩为M ,另在滑块D 上作用水平力F 。
机构尺寸如图所示。
求当机构平衡时,力F 与力偶矩M 的关系。
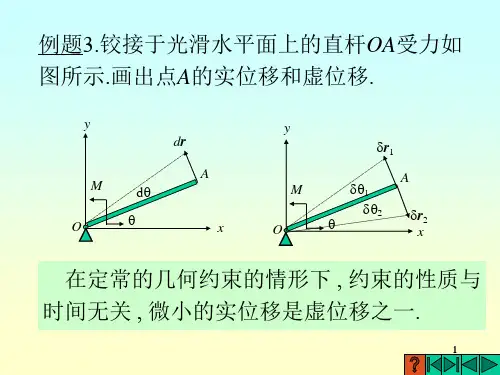
解 设OA 杆虚位移为δϕ,则A 、B 、C 、D 各点虚位移如图,θδθδθδθδδϕδcos 2cos cos 2cos D B A B A r r r r a r ===由上述各式和虚功方程0=+-D r F M δδϕ解出θ2tan Fa M =7-2. 图示桁架中,已知AD=DB=6m ,CD=3m ,节点D 处载荷为P 。
试用虚位移原理求杆3的内力。
解 B 、C 、D 各点虚位移如图所示,θδδθδθδcos ,2sin cos C D c B r r r r ==代入虚功方程 03=-B D r F r P δδ解得杆3的内力 P PF ==θcot 23 7-3. 组合梁由铰链C 铰接AC 和CE 而成,载荷分布如图所示。
已知跨度l=8m ,P=4900N ,均布力q=2450N/m ,力偶矩M=4900N ⋅m ;求支座反力。
N 2450N 14700N 2450==-=E B A F F F ,,7-4 组合梁由水平梁AC 、CD 组成,如图所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
组合梁由水平梁AC 、CD 组成,如图12-16a 所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
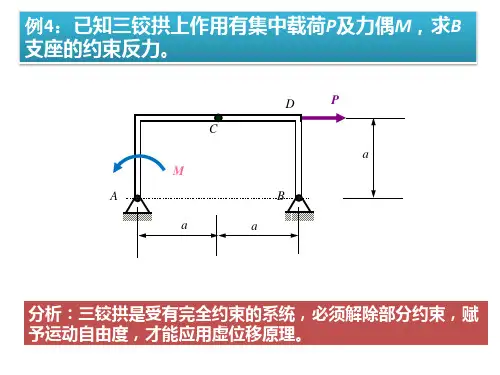
(a)(b)2 222(d )(e)图12-16 例题12-5图解:组合梁为静定结构,其自由度为零,不可能发生虚位移。
为能应用虚位移原理确定A 、B 二处的约束力,可逐次解除一个约束,代之以作用力,使系统具有一个自由度,并解除约束处的正应力视为主动力;分析系统各主动力作用点的虚位移以及相应的虚功,应用虚位移原理建立求解约束力的方程。