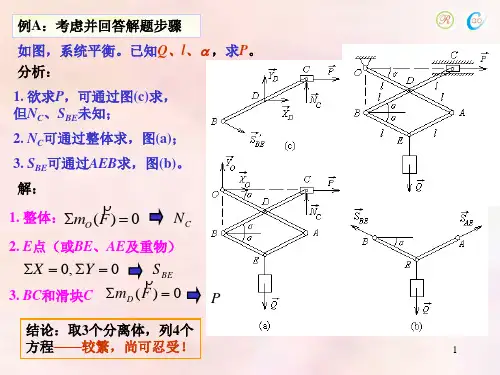
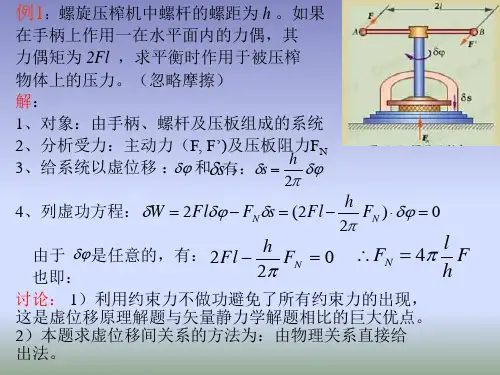
虚位移原理例题
- 格式:pptx
- 大小:1.91 MB
- 文档页数:22
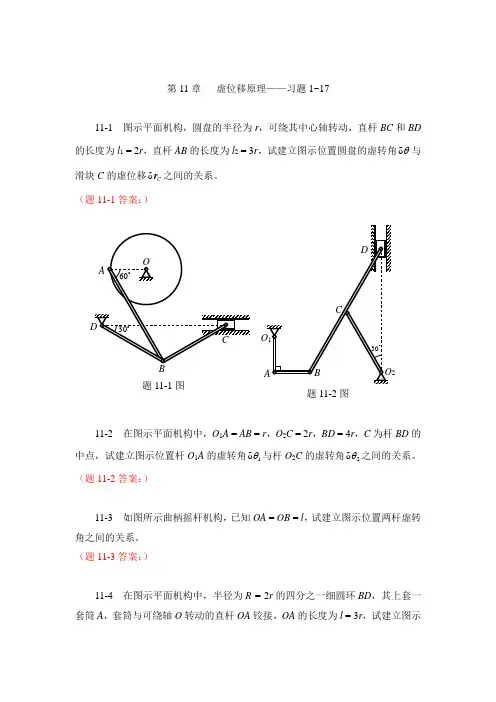
第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
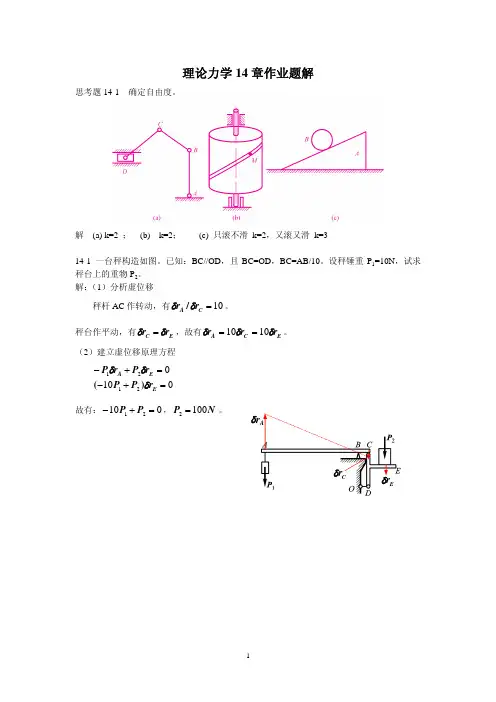
理论力学14章作业题解思考题14-1 确定自由度。
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
虚位移原理例题虚位移原理是力学中的一个重要概念,它是描述物体在受力作用下发生位移的原理。
虚位移原理在力学、静力学、动力学等领域都有着广泛的应用。
下面我们通过一些例题来深入理解虚位移原理的应用。
例题一,弹簧振子。
一根质量为m的弹簧上挂着一个质量为M的物体,当物体受到外力F时,弹簧发生形变。
求弹簧的位移x。
解析,根据虚位移原理,我们可以假设弹簧的位移为x,那么弹簧所受的弹力为-kx,其中k为弹簧的弹簧系数。
根据牛顿第二定律,物体所受的合外力为F-kx,根据虚位移原理,这个合外力所做的虚功等于零。
因此,我们可以得到F-kx=0,解得x=F/k。
例题二,斜面上的物体。
一个质量为m的物体沿着无摩擦的斜面向下滑动,斜面的倾角为θ,斜面的高度为h。
求物体滑动的位移s。
解析,根据虚位移原理,我们可以假设物体沿着斜面滑动的位移为s,那么物体所受的重力分解成沿斜面方向的分力为mgsinθ,垂直斜面方向的分力为mgcos θ。
根据虚位移原理,物体所受的合外力为mgsinθ,这个合外力所做的虚功等于零。
因此,我们可以得到mgsinθs=0,解得s=0。
例题三,简谐振动。
一个质量为m的物体挂在一个弹簧上,弹簧的劲度系数为k。
求物体振动的最大位移A。
解析,根据虚位移原理,我们可以假设物体振动的位移为x,那么物体所受的弹力为-kx。
根据牛顿第二定律,物体所受的合外力为-mg-kx,根据虚位移原理,这个合外力所做的虚功等于零。
因此,我们可以得到-mg-kA=0,解得A=mg/k。
通过以上例题的分析,我们可以看到虚位移原理在力学问题中的重要作用。
它通过假设物体的虚位移,使得问题的分析变得简单而直观。
虚位移原理的应用不仅仅局限于上面的例题,它在静力学、动力学、弹性力学等领域都有着广泛的应用。
因此,掌握虚位移原理对于理解力学问题、解决实际问题具有重要意义。
总结:虚位移原理是力学中的一个重要概念,它描述了物体在受力作用下发生位移的原理。
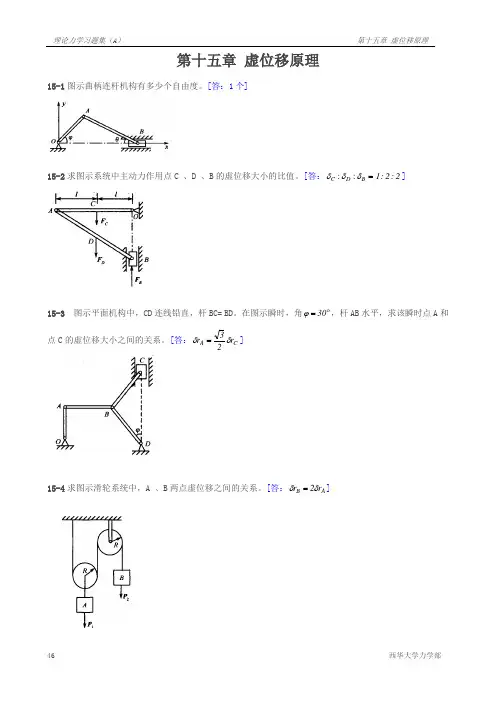
第十五章 虚位移原理15-1图示曲柄连杆机构有多少个自由度。
[答:1个]15-2求图示系统中主动力作用点C 、D 、B 的虚位移大小的比值。
[答:=B D C δδδ::2:2:1]15-3 图示平面机构中,CD 连线铅直,杆BC= BD 。
在图示瞬时,角 30=ϕ,杆AB 水平,求该瞬时点A 和点C 的虚位移大小之间的关系。
[答:C A r 23r δδ=]15-4求图示滑轮系统中,A 、B 两点虚位移之间的关系。
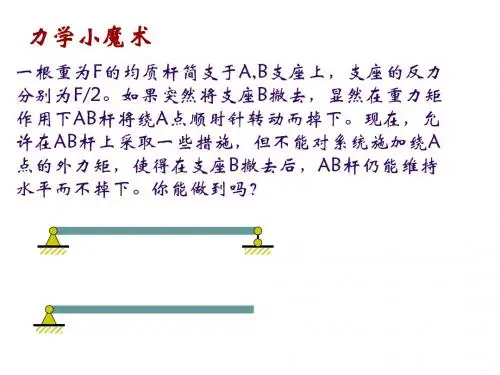
[答:A B r 2r δδ=]15-5重为P 、长为l 的均质杆AB 放置如图。
设各处光滑,在A 点处的水平力F 作用下保持平衡, 60=ϕ,今给A 点一向右的虚位移x δ,试由虚位移原理建立的虚功方程。
[答:0x F -63P=δδ]15-6 杆OA 和AB 各长l ,在A 点用铰链连接,在点O 和B 间连接一根刚度系数为 k 的铅直弹簧,弹簧的原长为0l 。
当在A 点作用铅垂力A F 时,机构处于图所示的平衡位置,且弹簧被拉伸。
如果不计各构件的重量和摩擦,用虚位移原理求机构处于平衡位置时的角度ϕ。
[答:4kl2kl F arcsinA +=ϕ]15-7 如图所示,两等长杆AB 和BC 在点B 用铰链连接。
在杆的点D 和点E 连接水平弹簧,弹簧的刚度系数为k ;从当距离AC a =时,弹簧的拉力等于零。
已知 AB=l , BD=b ,今在点C 作用水平力F 1使系统处于平衡。
若不计构件重量和摩擦,试用虚位移原理求距离AC 的值x 。
[答:21b l kFa x ⎪⎭⎫ ⎝⎛+=]15-8 在图示机构中,已知:力F ,l GC EG DE DC BC AC ======,弹簧的原长为l ,刚度系数为k 。
试用虚位移原理求机构平衡时,力F 与角θ的关系。
[答:()12sin kl 32F -=θ]15-9 平面机构在力F 1和F 2的作用下,在图所示的角度θ位置平衡。
已知1l BD OD ==,2l AD =,如果不计各构件重量和摩擦,试用虚位移原理求F 1 / F 2的比值。
虚位移原理例题虚位移原理是物理学中一个非常重要的概念,它描述了光学中光线的传播规律,也是解决光学问题的基本工具之一。
下面我们通过一些例题来深入理解虚位移原理。
例题一:一根直立的圆柱形玻璃杯里装满了水,现在在玻璃杯旁边放置一个小的物体。
当我们从玻璃杯的一侧观察时,看到的物体会出现在玻璃杯的哪个位置?解析:根据虚位移原理,我们知道光线在从一种介质射向另一种介质时会发生折射。
在这个例子中,当我们从玻璃杯的一侧观察时,光线会从空气中射入水中,然后再从水中射出。
根据虚位移原理,我们可以得出结论,在观察时,物体会出现在实际物体所在位置的上方,这就是虚位移的原理。
例题二:一束光线从空气中射入玻璃中,入射角为30°,折射角为20°。
求玻璃的折射率是多少?解析:根据折射定律,我们知道入射角和折射角之间有一个固定的关系,即折射率n等于正弦入射角与正弦折射角的比值。
根据虚位移原理,我们可以通过求解这个例题来验证虚位移原理的正确性。
根据已知条件,我们可以得出:n = sin(30°) / sin(20°) ≈ 1.5。
因此,玻璃的折射率约为1.5。
例题三:一束光线从空气中射入水中,入射角为45°,求折射角和折射率是多少?解析:根据折射定律和虚位移原理,我们可以通过这个例题来进一步验证虚位移原理的正确性。
根据折射定律,我们可以得出:sin(折射角) = sin(入射角) / n。
代入已知条件,我们可以得出:sin(折射角) = sin(45°) / 1.33 ≈ 0.707 / 1.33 ≈ 0.531。
折射角约为 arcsin(0.531) ≈ 32°。
因此,光线在从空气射入水中时,折射角约为32°,折射率约为1.33。
通过以上例题的分析,我们可以更加深入地理解虚位移原理在光学中的应用。
虚位移原理是解决光学问题的重要工具,它帮助我们理解光线在不同介质中传播的规律,也为光学领域的研究提供了重要的理论基础。
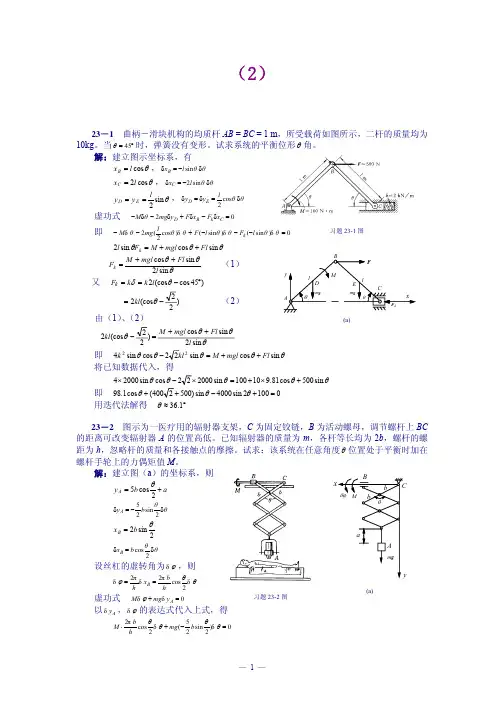
7-1. 在图示机构中,曲柄OA 上作用一力偶,其矩为M ,另在滑块D 上作用水平力F 。
机构尺寸如图所示。
求当机构平衡时,力F 与力偶矩M 的关系。
解 设OA 杆虚位移为δϕ,则A 、B 、C 、D 各点虚位移如图,θδθδθδθδδϕδcos 2cos cos 2cos D B A B A r r r r a r ===由上述各式和虚功方程0=+-D r F M δδϕ解出θ2tan Fa M =7-2. 图示桁架中,已知AD=DB=6m ,CD=3m ,节点D 处载荷为P 。
试用虚位移原理求杆3的内力。
解 B 、C 、D 各点虚位移如图所示,θδδθδθδcos ,2sin cos C D c B r r r r ==代入虚功方程 03=-B D r F r P δδ解得杆3的内力 P PF ==θcot 23 7-3. 组合梁由铰链C 铰接AC 和CE 而成,载荷分布如图所示。
已知跨度l=8m ,P=4900N ,均布力q=2450N/m ,力偶矩M=4900N ⋅m ;求支座反力。
N 2450N 14700N 2450==-=E B A F F F ,,7-4 组合梁由水平梁AC 、CD 组成,如图所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
组合梁由水平梁AC 、CD 组成,如图12-16a 所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
(a)(b)2 222(d )(e)图12-16 例题12-5图解:组合梁为静定结构,其自由度为零,不可能发生虚位移。
为能应用虚位移原理确定A 、B 二处的约束力,可逐次解除一个约束,代之以作用力,使系统具有一个自由度,并解除约束处的正应力视为主动力;分析系统各主动力作用点的虚位移以及相应的虚功,应用虚位移原理建立求解约束力的方程。