理论力学(14.7)--虚位移原理-思考题答案
- 格式:pdf
- 大小:65.42 KB
- 文档页数:3
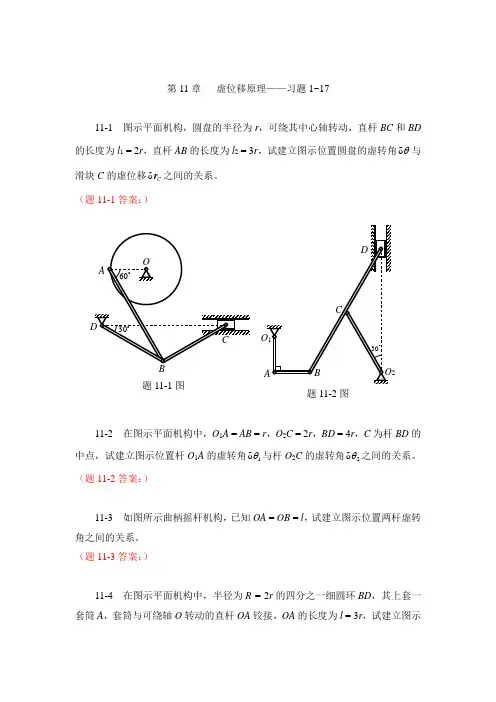
第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
理论力学14章作业题解思考题14-1 确定自由度。
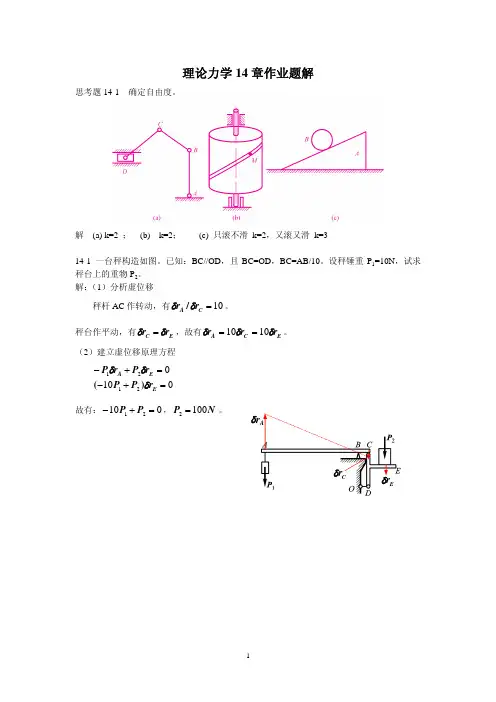
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
《理论力学》思考题及习题宁夏大学机械工程学院技术基础部使用教材:理论力学(Ⅰ).哈尔滨工业大学理论力学教研室,第六版.北京:高等教育出版社.说明:以下各章的思考题及习题的页码和题号均以“哈工大”第六版《理论力学》教材为准。
静力学第一章静力学公理和物体的受力分析思考题:1.合矢与合力概念相同吗?2.几何法求合矢时,分矢与合矢怎样区别?3.力沿任意两个轴分解时的两个分力与力向该二轴的投影大小是否相同?4.二力平衡与作用力、反作用力的概念有什么不同?5.二力杆或二力构件的受力特点是什么?6.不计重力但作用有力偶的杆是二力杆吗?7.三力平衡汇交时怎样确定第三个力的作用线方向?8.画受力图的一般步骤是什么?在画物系中各个分离体的受力图时需要注意什么?9.P18思考题。
习题:P20-21:1-1 (a) (c) (d) (e) (g) (i) (j) (k); 1-2 (a) (d) (f)(i)(m) (o) 第二章平面汇交力系与平面力偶系思考题:1.汇交力系的几何法与解析法在应用上各有什么特点?2.解平衡问题时的一般步骤与注意事项?3.解物系问题时的注意事项?4.P33思考题。
5.力偶的特点与等效条件是什么?6.解力偶系平衡问题时的一般步骤与注意事项?习题:P36-40:2-1;2-3; 2-9; 2--12 (a) (c);2—14;2—17第三章平面任意力系思考题:1.力线平移定理的含义?2.用二矩式、三矩式求解问题时,附加什么条件才能保证物系平衡?3.求解平衡问题时,有哪些技巧可以使计算方便?4.P61思考题。
5.物系问题的解题思路?怎样选取研究对象?怎样列方程?6.销钉既受力又连接两个以上物体时的受力分析需掌握什么原则?7.怎样能做到一个方程求解一个未知数?8.节点法的本质是什么?9.截面法的本质是什么?10.怎样判断零杆?习题:P63-71:3-1;3-4;3-6;3-12(a);3-13;3-22;3-34第四章空间力系思考题:1.空间力系化简结果与平面力系化简结果的关系?2.什么力系有六个平衡方程?什么力系有三个平衡方程?什么力系有两个平衡方程?什么力系只有一个平衡方程?3.计算重心的常用方法。
理论力学导学章虚位移原理第1616章第16章虚位移原理目录1. 内容提要... ... ... ... ... ... ... ... ... ... ... ... (3)2. 基本要求... ... ... ... ... ... ... ... ... ... ... ... (7)3. 典型例题... ... ... ... ... ... ... ... ... ... ... ... (8)4. 补充习题... ... ... ... ... ... ... ... ... ... ... ... (36)1.内容提要1)基本概念虚位移原理是用动力学的解题方法来研究静力学的平衡问题。
(1) 虚位移的概念及计算虚位移不是经过d t时间所发生的真实小位移,而是假想的、约束所允许的微小位移。
(2) 虚位移的计算方法大致可以分为以下两种:a. 虚速度法当时间“冻结”后,虚位移与速度具有相同的几何关系,所以可以利用运动学中研究速度的各种方法。
b. 解析法当质点系的广义坐标一旦确定,就将各质点的坐标表示为广义坐标的函数,然后通过对各质点坐标的变分,得到各质点的虚位移表示广义坐标的变更的关系式。
但必须注意,在应用解析法解题时,质点系中每一个质点都应处于一般位置。
0δ1=⋅∑=i ni i r F r r 0)δδδ(1=++∑=ni i iz i iy i ix z F y F x F (3)虚位移原理的应用几何形式对结构和机构都是适合的,但对机构,用解析法往往比较方便。
解析形式不能应用于处于特殊位置的机构。
应用虚位移原理解题时,对自由度为零的结构,根据题所要求的未知量,一般每次解除一个约束,使系统只有一个自由度,然后应用虚位移原理的几何形式(虚速度法)求解;对处于一般位置的机构,则可应用虚位移的解析形式求解。
虚位移原理的两种表达形式几何形式解析形式广义坐标形式的虚位移原理广义力以广义坐标表示的虚位移就是广义虚位移,与广义虚位移乘积后可以构成虚功的主动力就是广义力。
习 题4-1 如图4-19所示,在曲柄式压榨机的销钉B 上作用水平力F ,此力位于平面ABC 内,作用线平分∠ABC 。
设AB =BC ,∠ABC =θ2,各处摩擦及杆重不计,试求物体所受的压力。
图4-190δ)90cos(δδN =--︒=∑C B F s F s F W θ)90cos(δ)902cos(δθθ-︒=︒-C B s s θθsin δ2sin δC B s s = 虚位移原理0δ)90cos(δδN =--︒=∑C B F s F s F W θ 0δsin δN =-C B s F s F θθθθθtan 2)2sin(sin sin δδ2N F F s s F F C B ===4-2 如图4-20所示,在压缩机的手轮上作用一力偶,其矩为M 。
手轮轴的两端各有螺距同为h ,但方向相反的螺纹。
螺纹上各套有一个螺母A 和B ,这两个螺母分别与长为l 的杆相铰接,四杆形成棱形框,如图所示,此棱形框的点D 固定不动,而点C 连接在压缩机的水平压板上。
试求当棱形框的顶角等于2f 时,压缩机对被压物体的压力。
图4-20ϕϕcos δ)290cos(δC A s s =-︒ C A s s δsin δ2=ϕ而 θϕδπ2c o s δP s A =ϕθϕθϕtan δπsin δcos π22δPP s C ==虚位移原理0δδδN =-=∑C F s F M W θ 0tan δπδN =⨯-ϕθθPF M ϕcot πN PMF =4-3 试求图4-21所示各式滑轮在平衡时F 的值,摩擦力及绳索质量不计。
图4-21虚位移原理0δδδ=+-=∑A B F s G s F W(a) A B s s δ2δ= 2G F =(b) A B s s δ8δ= 8G F = (c) A B s s δ6δ= 6G F =(d) A B s s δ5δ= 5G F =4-4 四铰连杆组成如图4-22所示的棱形ABCD ,受力如图,试求平衡时θ应等于多少?图4-22θθcos δ)290cos(δC B s s =-︒ C B s s δsin δ2=θ 虚位移原理0δcos δ2δ=-=∑C B F s G s F W θ0sin δ2cos δ2=⨯-θθB B s G s Fθtan =GF4-5 在图4-23所示机构中,曲柄OA 上作用一力偶矩为M 的力偶,滑块D 上作用一水平力F ,机构尺寸如图。
§5、2虚功原理(虚位移原理)一、虚位移和实位移实位移:由于运动而实际发生的位移 dt v r d= 对应时间间隔dt ,同时满足运动微分方程虚位移:t 时刻,质点在约束允许情况下可能发生的无限小位置变更虚位移是可能位移,纯几何概念(非运动学概念),以i rδ表示(1)特点(本质):想象中可能发生的位移,它只取决于质点在t 时刻的位置和约束方程,并不对应一段时间间隔()0=t δ,它是一个抽象的等时变分概念(2)直观意义(求法):对于非稳定约束,在t 时刻将约束“冻结”,然后考察在约束允许情况下的可能位移,即视约束方程中的t 不变()0=t δ,对约束方程进行等时变分运算(同微分运算,注意)0=t δ即可得虚位移;对于稳定约束,由于约束方程中不显含t ,“冻结”已无实际意义,等时变分运算与微分运算完全相同。
Example 质点被限制在以等速u 匀速上升的水平面内运动,约束方程为 0=-ut z 0=z δ udt dz =(3)实位移是唯一的,虚位移可若干个;对稳定约束,实位移为若干个虚位移中的某一个;对非稳定约束,实位移与虚位移不一致。
见273p 图5.2-1二、理想约束实功-作用在质点上的力(含约束力i R )在实位移rd中所作的功 dW虚功-作用在质点上的力(含约束力i R )在任意虚位移rδ中所作的功 W δ其中 i R为第i 个质点受的约束力 若∑=⋅ii i r R 0δ体系所受诸约束反力在任意虚位移中所作元功之和等于零⇒理想约束例如 光滑曲面、曲线约束,刚性杆,不可伸长的绳索等刚性杆约束 022112111='+'-=⋅+⋅r f r f r f r f δδδδ (21f f-= 21f f =; 21r r '='δδ 刚性杆约束所允许) 由于引入了虚位移,巧妙的消取了约束反力(优点 亦是缺点)三、虚功原理(分析力学重要原理之一)(受约束力学体系的力学原理之一)体系受k 个几何约束,在主动力和约束力的共同作用下处于平衡状态,则其中每个质点均处于平衡状态,即 0=+i i R F (2,1=i ……)n 0=⋅+⋅ii i i r R r F δδ⇒对系统求和⇒0=⋅+⋅∑∑i i ii i ir R r Fδδ 对于理想约束∑=⋅ii i r R 0δ 则=W δ0=⋅∑i i ir Fδ∑=++ii iz i iy i ixz F y F x F)(δδδ 虚功原理⇒具有理想约束力学体系,其平衡的充要条件是所有主动力在任意虚位移中所作元功之和等于零 (1717 伯努利)说明:1、由=W δ0=⋅∑i i ir Fδ ,只能求出平衡条件,不能求出约束反力,欲求约束反力i R,需用拉格朗日未定乘数法2、运用虚功原理求平衡条件的方法步骤(1)确定系统自由度,选择合适的广义坐标;(2)将i r表示为广义坐标q的函数,并求出i rδ(i i i z y x δδδ,,);(3)由虚功原理列出平衡方程,并令αδq 的系数为零,求出平衡条件。
第14章虚位移原理—、是非题(正确的在括号内打、错误的打“x”)1.因为实位移和虚位移都是约束允许的无限小位移,所以实位移必定总是诸多虚位移中的一个。
(X )2.一个给定系统的自由度数是确定的,但广义坐标的选择是不确定的。
(」)3.虚位移虽与时间无关,但与主动力的方向一致。
二、填空题1.如图14.15所示的多菱形机构中,菱形中间放置一个弹簧秤,如果机构下端的重量为P,不计杆重,则弹簧秤显示的读数为业。
2.一平面机构如图14.16所示。
已知在杆。
A上的C点作用力P,在杆AB上的点。
作用力。
则作用在滑块B上的力F等于f+ Q。
图14.17三、选择题1.几何约束限制质点系中各质点的位置,但A。
(A)不限制各质点的速度;(B)同时也限制各质点的速度。
2.如图14.18所示的四连杆机构的虚位移有4种画法,其中正确的是A、C 。
3.如图14.19所示系统中,虚位移是勺,Erg是氐的,6^是A的,6七是A的。
将不正确的虚位移改正,并画在图上。
(A)正确(B)不正确(C)不能确定图14.19四、计算题14-1如图14.20所示的均质杆AB 21,一端靠在光滑的铅直墙壁上,另一端放在固定光滑面上。
欲使AB杆能静止在图示的铅直平面内,问P、Q的关系是怎样的?图14.20解:以杆为研究对象,若忽略各处的摩擦,则约束为理想约束。
作用于系统主的主动力为:水平推动P和重力0给系统以虚位移,设杆AB的A端向左移动极小的位移如,于是杆质心C有一个垂直于PC (P点为杆AB运动的速度瞬心)的位移"c。
列虚功方程,有8W = P6r A一Qbr c cos。
= 0为求得P、。
的关系,应找出和之间的关系。
由于A8为刚性杆,两点B、C的虚位移在A8杆上的投影应相等,即8r A cos cp — 8r c COS(2Q— 90°)即8^ = 2br c sine。
代入虚功方程有8W = (2Psin0-Qcos0)8e =0由于的任意性,故P ctgcp0 = K14-2平面结构如图14.21所示。
哈尔滨工业大学理论力学教研室理论力学(I)第8版习题答案《理论力学(1 第8版)/“十二五”普通高等教育本科国家级规划教材》第1版至第7版受到广大教师和学生的欢迎。
第8版仍保持前7版理论严谨、逻辑清晰、由浅入深、宜于教学的风格体系,对部分内容进行了修改和修正,适当增加了综合性例题,并增删了一定数量的习题。
本书内容包括静力学(含静力学公理和物体的受力分析、平面力系、空间力系、摩擦),运动学(含点的运动学、刚体的简单运动、点的合成运动、刚体的平面运动),动力学(含质点动力学的基本方程、动量定理、动量矩定理、动能定理、达朗贝尔原理、虚位移原理)。
本书可作为高等学校工科机械、土建、水利、航空、航天等专业理论力学课程的教材,也可作为高职高理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案专、成人高校相应专业的自学和函授教材,亦可供有关工程技术人员参考。
本书配套的有《理论力学学习辅导》、《理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学关注网页底部或者侧栏二维码回复理论力学(I)第8版答案免费获取答案引言第一章静力学公理哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学引言第一章静力学公理和物体的受力分析第二章平面力系第三章空间力系第四章摩擦理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案§4-4 滚动摩阻的概念运动学引言第五章点的运动学*§5-5 点的速度和加速度在球坐标中的投影思考题习题第六章刚体的简单运动§6-1 刚体的平行移动§6-2 刚体绕定轴的转动§6-3 转动刚体内各点的速度和加速度§6-4 轮系的传动比§6-5 以矢量表示角速度和角加速度·以矢积表示点的速度和加速度思考题习题第七章点的合成运动第八章刚体的平面运动动力学引言第九章质点动力学的基本方程第十章动量定理第十一章动量矩定理第十二章动能定理第十三章达朗贝尔原理第十四章虚位移原理参考文献习题答案索引Synopsis哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案第十四章虚位移原理。
虚位移原理虚位移原理提供了静力学问题的一种全新的解法,它还是分析力学的基础。
虚位移原理是设计用来消除平衡方程中的约束力,主要是用来求解平衡系统的主动力之间的关系或平衡位置。
另外,通过解除约束,将内力或约束力转化为主动力,则虚位移原理也可用来求解内力和约束力,而且这比以前的列平衡方程的常规方法更有效。
一、力的功元功:力在微小位移上所做的功称为元功。
其数学表达式为:t d W v F ∙=δ或r F d W ∙=δ,其中v 和r d 分别为力F 作用点的速度和微小位移。
变力在曲线路径上做的功可以用曲线积分计算。
等效力系做功定理: 等效力系在刚体的位移上所做的功相等。
即:若},,{},,{11m P P F F n =,则∑∑===mj jn i i P W F W 11)()(。
在计算力的功时,为计算方便,可以利用上述定理。
例如:图4-1(a)所示鼓轮上缠绕有柔索,在力F (大小和方向不变)作用下在地面上纯滚动。
计算在轮心沿直线移动S 距离过程中力F 所做的功。
(a) (b) 图4-1由于力F 的作用点的位移不易计算,我们可将F 平移到轮心,同时附加一力偶M (其力偶矩的大小为=M Fr ,如图4-1b 所示)以保持力系等效,即},{}{M F F =。
新的力系},{M F 在轮心沿直线移动S 距离过程中所作的功较易计算:ϕθM FS W +=cos ,其中:ϕ为圆盘轮心移动S 距离时,圆盘转动的角度,即RS =ϕ,于是上式可写成cos SW FS Fr R θ=+⋅ 它等于在轮心沿直线位移S 距离过程中力F 所做的功。
返回主目录二、约束及其分类约束:对质点或质点系运动所加的限制。
如某质点被限制在固定曲面上运动,则该质点就是受到了约束。
约束体对被约束体的运动是通过力的作用(称为约束力)来加以限制的,但是约束与受力是应区别对待的两个不同概念,这可以通过下面的例子来区分.(a)(b) (c)图4-2对图4-2中所示的系统:在(a)中,质点A 被固定在刚性杆上并球铰链连接接在固定点o 。
第十四章 虚位移原理
答 案
14-1
(1)若认为B处虚位移正确,则A,C处虚位移有错:A处位移应垂直于
O1A向左上方,C处虚位移应垂直向下。
若认为C处虚位移正确,则B,A处虚位移有错:B处虚位移应反向,A处虚位移应垂直于O1A向右下方。
C处虚位移可沿力的作用线,A处虚位移不能沿力的作用线。
(2)三处虚位移均有错,此种情况下虚位移均不能沿力的作用线。
杆
AB,DE若运动应作定轴转动,B,D点的虚位移应垂直于杆AB,DE;杆BC,DE作平面运动,应按刚体平面运动的方法确定点C虚位移。
14-2
(1)可用几何法,虚速度法与坐标(解析)法;对此例几何法与虚速度法比坐标(解析)法简单,几何法与虚速度法难易程度相同。
(2)可用几何法,虚速度法与坐标(解析)法。
几何法与虚速度法相似,比较简单。
用坐标法也不难,但要注意δθ的正负号。
(3)同(2)
(4)用几何法或虚速度法比较简单,可以用坐标法,但比较难。
(5)同(4)
14-3
(1)不需要。
(2)需要。
内力投影,取矩之和为零,但内力作功之和可以不为零。
14-4
弹性力作功可用坐标法计算,也可用弹性力作功公式略去高阶小量计算;摩擦力在此虚位移中作正功。
14-5
在平面力系所在的刚体平面内建立一任意的平面直角坐标系,在此刚体平面内任选一点作为基点,写出此平面图形的运动方程。
设任一力 的作用点为(x i, y i),且把此坐标以平面图形运动方程表示,设此点产生虚位移,把力
投影到坐标轴上,且写出此点直角坐标的变分,用解析法形式的虚位移表达式,把力的投影与直角坐标变分代入,运算整理之后便可得。
也可以在平面力系所在的刚体平面内任选一点O(简化中心),把平面力系向此点简化得一主矢与主矩,把主矢以 表示,分别给刚体以虚位移
,由虚位移原理也可得平衡方程。