虚功(虚位移)原理复习与例题共50页
- 格式:ppt
- 大小:4.21 MB
- 文档页数:50
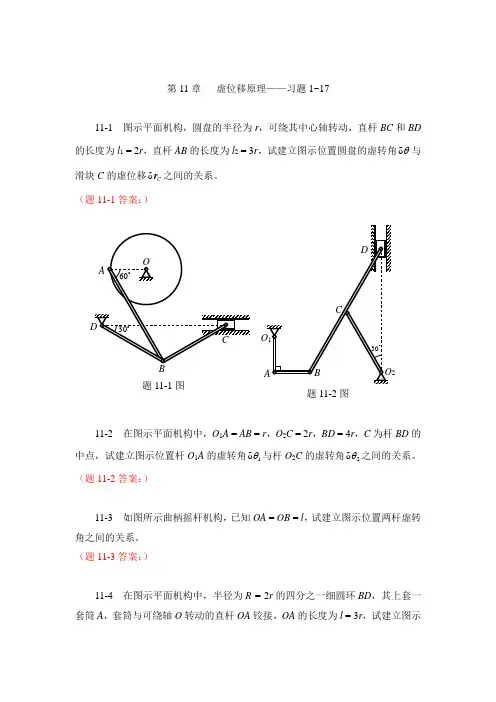
第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
第十四章-虚位移原理讲义-CAL-FENGHAI.-(YICAI)-Company One1第十四章虚位移原理一、回顾:液压升降台如图所示,求油压举升缸筒的拉力。
本题目是物体系平衡问题。
图(a)1.取缸筒为研究对象∑M G(F)=0 求出F E2.取CG、DE+缸筒为研究对象∑M C(F)=0 求出F Dy(b)(c)23.取整体为研究对象∑M A(F)=0 求出F B4.取杆BD为研究对象∑M K(F)=0 求出F Dx(d)(e)5.取杆DE为研究对象∑M O(F)=0 求出F JH由上分析可知:(1)用静力学中求解物体系统平衡问题的方法求解,需要选取5次研究对象,列5个方程,求解过程较为复杂。
(2)运算过程中出现了4个题目并不需要求解的约束反力,称之为中间变量,消除这些约束反力,才能得到要求的量。
问题有无别的方法求解物体系统的平衡问题而这种方法又能避开求这些中间变量,简化求解过程。
二、求解物体系统的平衡问题的两种方法⑴用静力平衡方程求解----刚体静力学(几何静力学)⑵用虚位移原理求解----分析静力学3虚位移原理是应用功的概念分析系统的平衡问题,是研究静力学平衡问题的另一途径。
对于只有理想约束的物体系,由于约束力不作功,有时应用虚位移原理求解更为方便。
三、利用虚位移原理求解的平衡问题一般有如下几个特点:⑴结构特点-----结构为几何可变体系⑵待求量特点-----数目较少⑶研究对象的选取-----取整体即可求解四、基本概念几何可变体系-----约束允许系统动几何不变体系-----约束不允许系统动举例:图图如图所示,约束允许结构动,受力后可以不动,该结构为几何可变体系。
如图所示,约束不允许结构动,受力后仍然不动,该结构为几何不变体系。
对于几何不变体系,只要解除某些约束,用约束力代替约束的作用,即可将不变体系变为可变体系。
约束·虚位移·虚功一、约束及其分类4(1)概念约束——限制质点或质点系运动的条件。

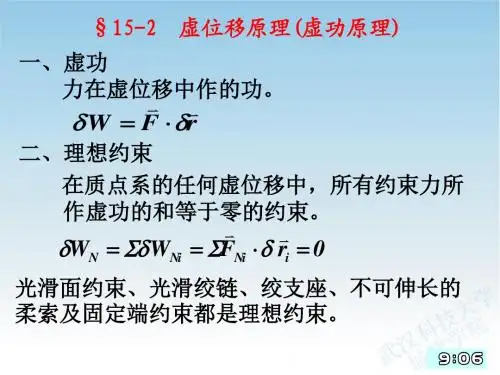

虚功原理例题虚功原理是力学中的一个重要原理,它在解决静力学和动力学问题中有着广泛的应用。
虚功原理的核心思想是系统受力平衡时,任何虚位移所做的功都为零。
通过虚功原理,我们可以简化和系统化力学问题的求解过程,使得复杂的力学问题变得更加清晰和易于理解。
下面,我们通过几个例题来深入理解虚功原理的应用。
例题一:如图所示,质量为m的物体通过绳子和光滑的滑轮与墙面连接,滑轮的质量可以忽略不计。
求当物体下降h时,绳子所做的功。
解析:根据虚功原理,我们可以假设物体下降了Δh的虚位移,此时绳子所做的虚功可以表示为W=mgΔh。
由于绳子是光滑的,所以滑轮对绳子所做的虚功为零。
根据虚功原理,物体所受的重力和绳子的拉力平衡,因此绳子所做的虚功也为零。
所以绳子所做的功为零。
例题二:一个质量为m的物体放在倾角为θ的光滑斜面上,斜面的长度为L。
求当物体下降h时,重力对斜面所做的功。
解析:当物体下降h时,我们可以假设斜面上升Δh的虚位移,此时重力对斜面所做的虚功可以表示为W=mgΔh。
根据虚功原理,斜面对物体的支持力与物体下降的高度有关,所以斜面对物体所做的虚功也不为零。
根据几何关系,斜面对物体所做的功可以表示为W=mgLsinθ。
因此,重力对斜面所做的功为W=mgLsinθ。
例题三:一个质量为m的物体通过绳子与墙面连接,绳子的另一端连接着一个质量为M的物体。
求当物体下降h时,绳子对墙面的拉力所做的功。
解析:当物体下降h时,我们可以假设绳子下降Δh的虚位移,此时绳子对墙面的拉力所做的虚功可以表示为W=TΔh。
根据虚功原理,绳子对墙面的拉力与物体下降的高度有关,所以绳子对墙面的拉力所做的虚功不为零。
因此,绳子对墙面的拉力所做的功为W=Th。
通过以上例题的分析,我们可以看到虚功原理在力学问题中的重要作用。
它不仅可以简化问题的求解过程,还可以帮助我们更加深入地理解力学问题背后的物理本质。
希望通过这些例题的讲解,能够对虚功原理有一个更加清晰的认识。
7-1. 在图示机构中,曲柄OA 上作用一力偶,其矩为M ,另在滑块D 上作用水平力F 。
机构尺寸如图所示。
求当机构平衡时,力F 与力偶矩M 的关系。
解 设OA 杆虚位移为δϕ,则A 、B 、C 、D 各点虚位移如图,θδθδθδθδδϕδcos 2cos cos 2cos D B A B A r r r r a r ===由上述各式和虚功方程0=+-D r F M δδϕ解出θ2tan Fa M =7-2. 图示桁架中,已知AD=DB=6m ,CD=3m ,节点D 处载荷为P 。
试用虚位移原理求杆3的内力。
解 B 、C 、D 各点虚位移如图所示,θδδθδθδcos ,2sin cos C D c B r r r r ==代入虚功方程 03=-B D r F r P δδ解得杆3的内力 P PF ==θcot 23 7-3. 组合梁由铰链C 铰接AC 和CE 而成,载荷分布如图所示。
已知跨度l=8m ,P=4900N ,均布力q=2450N/m ,力偶矩M=4900N ⋅m ;求支座反力。
N 2450N 14700N 2450==-=E B A F F F ,,7-4 组合梁由水平梁AC 、CD 组成,如图所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
组合梁由水平梁AC 、CD 组成,如图12-16a 所。
已知:F 1= 20kN ,F 2 = 12kN ,q = 4kN/m ,M = 2kN ·m 。
不计梁自重,试求:固定端A 和支座B 处的约束力。
(a)(b)2 222(d )(e)图12-16 例题12-5图解:组合梁为静定结构,其自由度为零,不可能发生虚位移。
为能应用虚位移原理确定A 、B 二处的约束力,可逐次解除一个约束,代之以作用力,使系统具有一个自由度,并解除约束处的正应力视为主动力;分析系统各主动力作用点的虚位移以及相应的虚功,应用虚位移原理建立求解约束力的方程。