结构力学 结构的位移计算作业答案
- 格式:pptx
- 大小:1.30 MB
- 文档页数:19
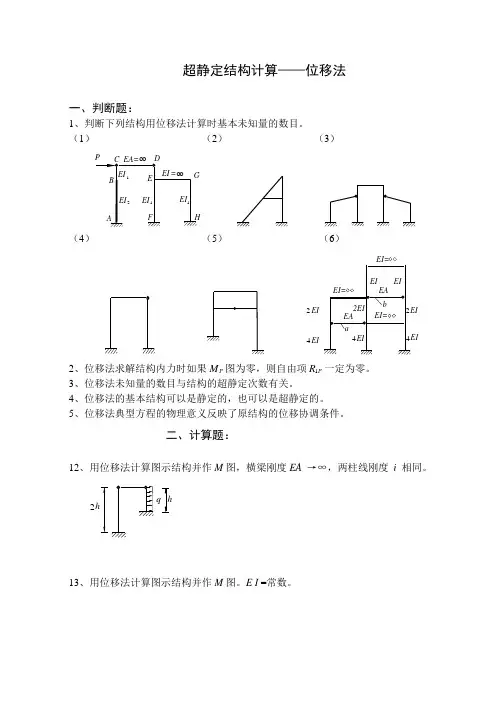
超静定结构计算——位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI 2EI EI EIEIEAEA ab EI=EI=EI=244422、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
二、计算题:12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。
213、用位移法计算图示结构并作M 图。
E I =常数。
—— 41 ——ll /2l /214、求对应的荷载集度q 。
图示结构横梁刚度无限大。
已知柱顶的水平位移为 ()5123/()EI →。
12m12m8mq15、用位移法计算图示结构并作M 图。
EI =常数。
ll ll16、用位移法计算图示结构,求出未知量,各杆EI 相同。
4m19、用位移法计算图示结构并作M 图。
qll20、用位移法计算图示结构并作M 图。
各杆EI =常数,q = 20kN/m 。
6m6m23、用位移法计算图示结构并作M 图。
EI =常数。
ll 224、用位移法计算图示结构并作M 图。
EI =常数。
q29、用位移法计算图示结构并作M 图。
设各杆的EI 相同。
qql l /2/232、用位移法作图示结构M 图。
E I =常数。
—— 43 ——qql l/2l /2l36、用位移法计算图示对称刚架并作M 图。
各杆EI =常数。
l l38、用位移法计算图示结构并作M 图。
EI =常数。
ql l l l42、用位移法计算图示结构并作M 图。
2m 2m43、用位移法计算图示结构并作M 图。
EI =常数。
lllql48、已知B 点的位移∆,求P 。
ll/2/2A∆51、用位移法计算图示结构并作M 图。
超静定结构计算——位移法(参考答案)1、(1)、4; (2)、4; (3)、9; (4)、5; (5)、7;(6)、7。
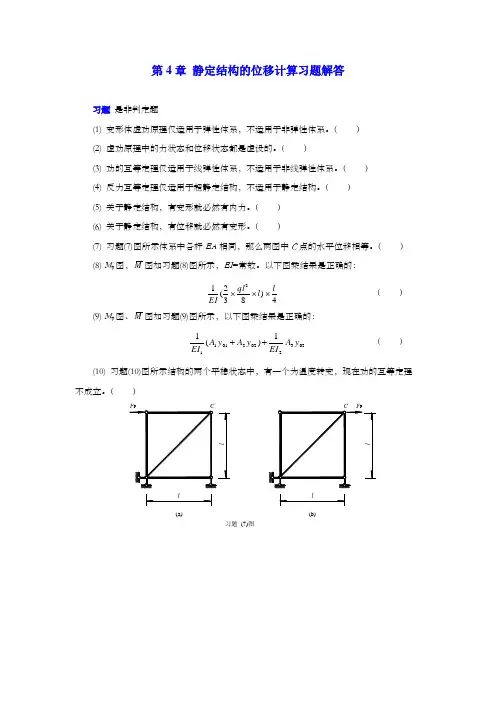
第4章 静定结构的位移计算习题解答习题 是非判定题(1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。
( ) (2) 虚功原理中的力状态和位移状态都是虚设的。
( )(3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。
( ) (5) 关于静定结构,有变形就必然有内力。
( ) (6) 关于静定结构,有位移就必然有变形。
( )(7) 习题(7)图所示体系中各杆EA 相同,那么两图中C 点的水平位移相等。
( ) (8) M P 图,M 图如习题(8)图所示,EI =常数。
以下图乘结果是正确的:4)832(12ll ql EI ⨯⨯⨯ ( )(9) M P 图、M 图如习题(9)图所示,以下图乘结果是正确的:033202201111)(1y A EI y A y A EI ++ ( )(10) 习题(10)图所示结构的两个平稳状态中,有一个为温度转变,现在功的互等定理不成立。
( )(a)(b)习题 (7)图图(b)M图(a)M P 81qM 图(b)P M 图(a)习题 (8)图 习题 (9)图(a)P习题 (10)图【解】(1)错误。
变形体虚功原理适用于弹性和非弹性的所有体系。
(2)错误。
只有一个状态是虚设的。
(3)正确。
(4)错误。
反力互等定理适用于线弹性的静定和超静定结构。
(5)错误。
譬如静定结构在温度转变作用下,有变形但没有内力。
(6)错误。
譬如静定结构在支座移动作用下,有位移但没有变形。
(7)正确。
由桁架的位移计算公式可知。
(8)错误。
由于取0y 的M 图为折线图,应分段图乘。
(9)正确。
(10)正确。
习题 填空题(1) 习题(1)图所示刚架,由于支座B 下沉∆所引发D 点的水平位移∆D H =______。
(2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。
其中,用于求位移的是_______原理。
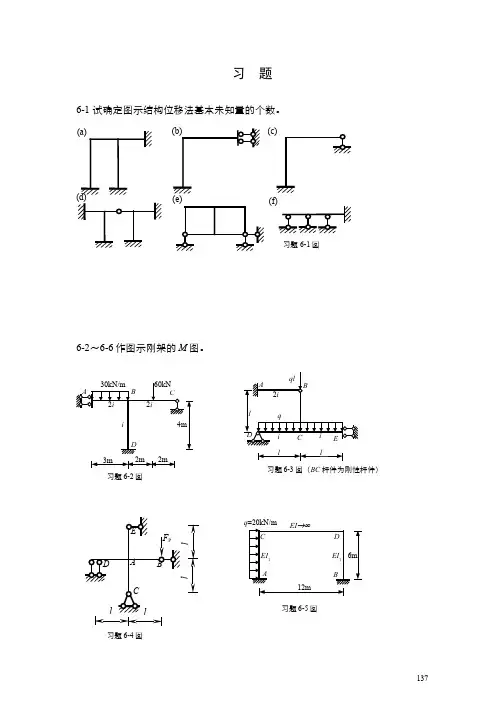
习 题6-1 试确定图示结构位移法基本未知量的个数。
6-2~6-6作图示刚架的M 图。
(a)(f)习题6-1图(d)习题6-2图习题6-5图习题6-3图(BC 杆件为刚性杆件)习题6-4图6-6 试用位移法计算图示结构,并作内力图。
6-7 试用位移法计算图示结构,并作内力图。
6-8 试用位移法计算图示结构,并作内力图。
EI 为常数。
6-9试用位移法计算图示结构,并作弯矩图。
EI 为常数。
6-10 试用位移法计算图示结构,并作弯矩图(提示:结构对称)。
习题6-9图习题6-7图6-11作图示刚架的体系内力图。
6-12 设支座 B 下沉0.5cm B D =,试作图示刚架的M 图。
6-13如图所示连续梁,设支座C 下沉淀1cm ,试作M 图。
6-14图示等截面正方形刚架,内部温度升高+t°C ,杆截面厚度h ,温度膨胀系数为 ,试作M 图。
10 kN/m( a )( b)40 kN习题6-10图BGH习题6-11图(a )(b )q6-15试作图示有弹性支座的梁的弯矩图,332EIk l=,EI =常数。
6-16 试用弯矩分配法计算图示连续梁,并作M 图。
6-176-18 用力矩分配法计算图示结构,并作M 图。
6-19 已知图示结构的力矩分配系数1238/13,2/13,3/13,A A A m m m ===作M 图。
6-20 求图示结构的力矩分配系数和固端弯矩。
已知q=20kN/m,各杆EI 相同。
习题6-17图习题6-13图习题6-14图6-21~6-22 用力矩分配法计算图示连续梁,作M 图,并计算支座反力。
EI=常数。
6-23~6-25用力矩分配法计算图示刚架,作M 图。
EI=常数。
参考答案6.1 (a) 2 (b) 1 (c) 2 (d) 3 (e) 6 (f) 26.2 15BD M =kN·m (右侧受拉)20kN/m 40kN习题6-22图习题6-21图15kN/m习题6-23图F P =10kN 习题6-24图习题6-25图6.321112AB M ql =(上侧受拉)6.4P 0.4AD M F l =(上侧受拉)6.5150AC M =kN·m (左侧受拉)6.651.3AB M =kN·m (左侧受拉)6.780AB M =kN·m (上侧受拉)6.816.9AB M =kN·m (左侧受拉)6.9 (a) 10.43CA M =kN·m (左侧受拉) (b) 56.84CE M =kN·m (下侧受拉)6.10 (a) 8.5AB M =kN·m (上侧受拉) (b) 34.3AC M =kN·m (左侧受拉)6.11 (a) 20.794DC M ql =(右侧受拉) (b) 6.14GD M q =(右侧受拉)6.1223.68AC M =kN·m (右侧受拉)6.1359.3310BA M =ᅲkN·m (上侧受拉)6.142/M EIt h a =(外侧受拉)6.152/32BA M ql =(下侧受拉)6.1617.5CB M =kN·m (下侧受拉)6.1778.75CD M =kN·m (上侧受拉)6.1827/12AB M ql =(上侧受拉)6.191117.95A M =kN·m (上侧受拉)6.200.34AD m =,13.33AD M =kN·m 6.2142.3BA M =kN·m (上侧受拉)6.2217.35BA M =kN·m (上侧受拉)6.2357.4BA M =kN·m (上侧受拉)6.2428.5BA M =kN·m (上侧受拉)6.2573.8BD M =kN·m (左侧受拉)。
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.M =1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M 17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q11、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/l/2219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
ll22、图示结构充满水后,求A 、B 两点的相对水平位移。
第五章 图乘法一、判断题1. 已 知 、M p M k 图 ,用 图 乘 法 求 位 移 的 结 果 为:()/()ωω1122y y E +I 。
( ) M kM p21y 1y 2**ωω2. 图 示 梁 EI = 常 数 , 杆 长 为 l , 其 中 点 C 的 位 移 为。
( )ΔCV ql EI =424/() q3. 图 示 结 构A 截 面 的 转 角 为 A ϕ=Pa EI 22。
( )A4.图 示 桁 架 在 某 因 素 作 用 下 ,求CD 杆 的 转 角 时 , 其 虚 力 状 态的 广 义 单 位 力 如 图 所 示 : ()m k=1m =1 5. 图 示 桁 架 , EA = 常 数 , 在 力 P 作 用 下 , C 点 竖 向 位 移ΔCV Pa EA =1414./。
( )XXXXO二、选择题6.图 示 结 构 , 求 A 、B 两 点 相 对 线 位 移 时 , 虚 力 状 态 应 在 两 点 分 别 施 加 的 单 位 力 为 : ( ) A 。
竖 向 反 向 力 ; B 。
水 平 反 向 力 ; C 。
连 线 方 向 反 向 力 ; D 。
反 向 力 偶 。
AB7. 四 个 互 等 定 理 适 用 于 :( )A .刚 体 ;B .变 形 体;C .线 性 弹 性 体 系 ;D .非 线 性 体 系 。
8. 图 示 结 构 A 截 面 转 角(设 顺 时 针 为 正)为 :( )A .22Pa EI / ; B .−Pa EI 2/ ; C .5 ;42Pa EI /() D .-5 。
42Pa EI /()PA9.图 示 梁 A 点 的 竖 向 位 移 为 ( 向 下 为 正 ):() A . ; Pl EI 324/()B .;Pl EI 316/()CCCCC .5 ; 963Pl EI /()D .。
5483Pl EI /()P10. 图 示 结 构 (E I = 常 数), D 点 水 平 位 移 ( 向 右 为 正 ) 为 :( )A. ; (qa EI 43/)B. qa ; EI 46/()C. - qa ;EI 43/()D. - 。
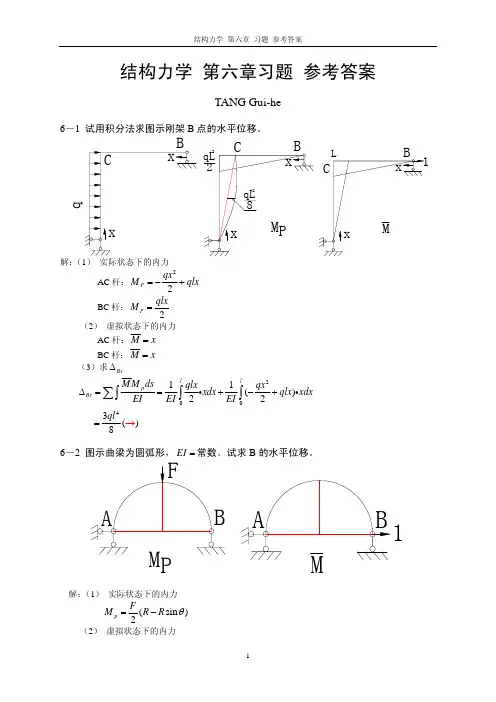
结构力学 第六章习题 参考答案TANG Gui-he6-1 试用积分法求图示刚架B 点的水平位移。
q解:(1) 实际状态下的内力AC 杆:22P qx M qlx =−+BC 杆:2P qlxM =(2) 虚拟状态下的内力AC 杆:M x = BC 杆:M x = (3)求Bx Δ200411()223 ()8l lp Bx M M ds qlx qx xdx qlx xdx EIEI EI qlΔ==+−+=∑∫∫∫i i→6-2 图示曲梁为圆弧形,EI =常数。
试求B 的水平位移。
1解:(1) 实际状态下的内力(sin 2p FM R R )θ=− (2) 虚拟状态下的内力1sin M R θ=i (3)求 Bx Δ/2312(sin )sin 22p Bx M M ds F F R R R Rd EIEIEIπθθθΔ==→−=∑∫∫ii i ()R6-3B AAB解:(1) 实际状态下的内力20sin()(1cos )p M qRd R qR θϕθϕθ=−=−∫i(2) 虚拟状态下的内力1sin M R θ=i(3)求 Bx Δ/2421(1cos )sin ()2p Bx M M ds FR qR R Rd EIEIEIπθθθΔ==←−=∑∫∫i i6-4 图示桁架各杆截面均为,32210m A −=×210 GPa E =,40 kN F =,。
试求:(a) C 点的竖向位移;(b) 角ADC 的改变量。
2 m d =F (kN)NP解: 实际状态下的桁架内力如上图。
(a )在C 点加上一个单位荷载,得到虚拟状态下的内力如上图。
11[2()(222322]22210)()N Np Cy F F l F d F d EAEA FdEAΔ==−−+↓++=+∑i i i i i i iNPNP(b)虚拟状态下的内力如上图。
11(22()(]4) ()N NpADCF F lF dEA EA dFEAϕ∠Δ==++−=∑ii i i增大6-6 试用图乘法求指定位移。
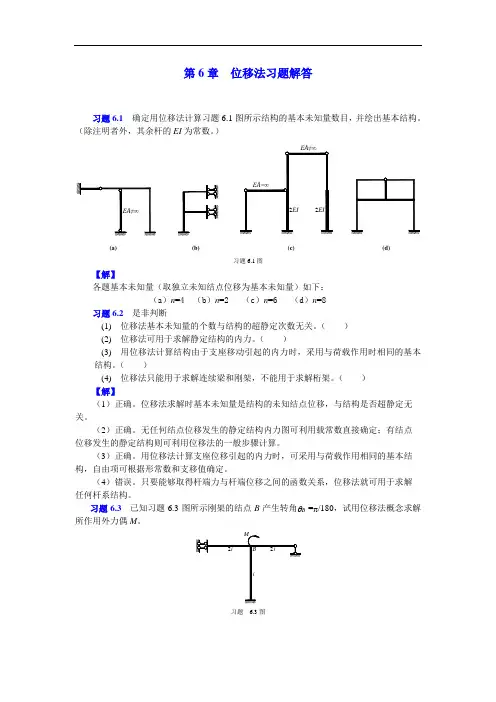
第6章位移法习题解答习题6.1确定用位移法计算习题6.1图所示结构的基本未知量数目,并绘出基本结构。
(除注明者外,其余杆的EI为常数。
)(a) (b) (c) (d)习题6.1图【解】各题基本未知量(取独立未知结点位移为基本未知量)如下:(a)n=4 (b)n=2 (c)n=6 (d)n=8习题6.2是非判断(1)位移法基本未知量的个数与结构的超静定次数无关。
()(2)位移法可用于求解静定结构的内力。
()(3)用位移法计算结构由于支座移动引起的内力时,采用与荷载作用时相同的基本结构。
()(4)位移法只能用于求解连续梁和刚架,不能用于求解桁架。
()【解】(1)正确。
位移法求解时基本未知量是结构的未知结点位移,与结构是否超静定无关。
(2)正确。
无任何结点位移发生的静定结构内力图可利用载常数直接确定;有结点位移发生的静定结构则可利用位移法的一般步骤计算。
(3)正确。
用位移法计算支座位移引起的内力时,可采用与荷载作用相同的基本结构,自由项可根据形常数和支移值确定。
(4)错误。
只要能够取得杆端力与杆端位移之间的函数关系,位移法就可用于求解任何杆系结构。
习题6.3已知习题6.3图所示刚架的结点B产生转角θB =π/180,试用位移法概念求解所作用外力偶M。
习题 6.3图【解】30i π 。
发生转角θB 时,可直接求得结点B 所连的各杆端弯矩,再由结点B 的平衡条件即可得M 。
习题6.4 若习题6.4图所示结构结点B 向右产生单位位移,试用位移法中剪力分配法的概念求解应施加的力F P 。
习题 6.4图【解】315lEI。
结点B 向右产生单位位移时,横梁所连各柱端剪力之和即为F P 。
习题6.5 已知刚架的弯矩图如习题6.5图所示,各杆EI =常数,杆长l =4m ,试用位移法概念直接计算结点B 的转角θB 。
m习题 6.5图【解】由M 图可知,BC 杆上无外荷载,其杆端弯矩为330BC BC B M i θ==-,由此求得40B EIθ=-。
结构位移计算
1 结构位移计算作业 02
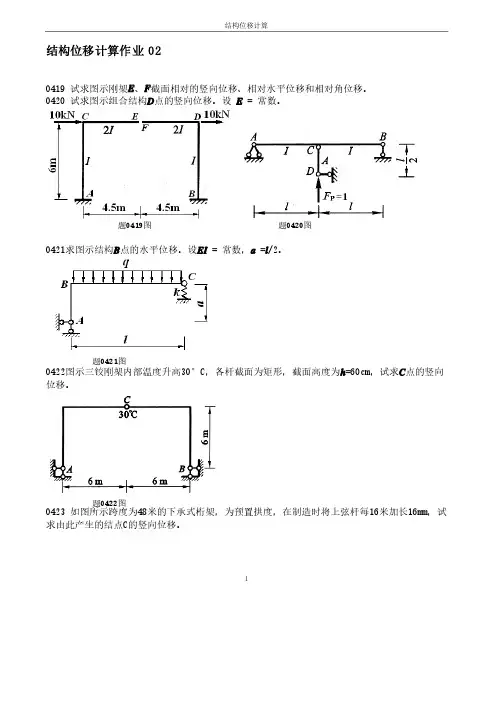
0419 0419 试求图示刚架试求图示刚架E 、F 截面相对的竖向位移、相对水平位移和相对角位移。
0420 0420 试求图示组合结构试求图示组合结构D 点的竖向位移。
设E = = 常数。
常数。
题04190419图图题04200420图图
04210421求图示结构求图示结构B 点的水平位移。
设EI = = 常数,常数,a =l /2/2。
题04210421图图
04220422图示三铰刚架内部温度升高图示三铰刚架内部温度升高图示三铰刚架内部温度升高303030°°C ,各杆截面为矩形,截面高度为h =60cm =60cm,试求,试求C 点的竖向位移。
题04220422图图
0423 0423 如图所示跨度为如图所示跨度为如图所示跨度为484848米的下承式桁架,为预置拱度,在制造时将上弦杆每米的下承式桁架,为预置拱度,在制造时将上弦杆每米的下承式桁架,为预置拱度,在制造时将上弦杆每161616米加长米加长米加长16mm 16mm 16mm,试,试求由此产生的结点求由此产生的结点C C 的竖向位移。
结构位移计算结构位移计算
2
0424 0424 如图所示刚架,支座如图所示刚架,支座A 发生图示位移,试求由此产生的结点B 的竖向位移。
的竖向位移。
04250425如图所示桁架,支座如图所示桁架,支座A 发生向下沉陷发生向下沉陷15mm 15mm 15mm,试求由此产生的结点,试求由此产生的结点,试求由此产生的结点D D 的水平位移。
的水平位移。

第1章 绪论(无习题)第2章 平面体系的几何组成分析习题解答习题2.1 是非判断题(1) 若平面体系的实际自由度为零,则该体系一定为几何不变体系。
( )(2) 若平面体系的计算自由度W =0,则该体系一定为无多余约束的几何不变体系。
( ) (3) 若平面体系的计算自由度W <0,则该体系为有多余约束的几何不变体系。
( ) (4) 由三个铰两两相连的三刚片组成几何不变体系且无多余约束。
( )(5) 习题2.1(5) 图所示体系去掉二元体CEF 后,剩余部分为简支刚架,所以原体系为无多余约束的几何不变体系。
( )B DACEF习题 2.1(5)图(6) 习题2.1(6)(a)图所示体系去掉二元体ABC 后,成为习题2.1(6) (b)图,故原体系是几何可变体系。
( )(7) 习题2.1(6)(a)图所示体系去掉二元体EDF 后,成为习题2.1(6) (c)图,故原体系是几何可变体系。
()(a)(b)(c)AEBFCD习题 2.1(6)图【解】(1)正确。
(2)错误。
0W 是使体系成为几何不变的必要条件而非充分条件。
(3)错误。
(4)错误。
只有当三个铰不共线时,该题的结论才是正确的。
(5)错误。
CEF 不是二元体。
(6)错误。
ABC 不是二元体。
(7)错误。
EDF 不是二元体。
习题2.2 填空(1) 习题2.2(1)图所示体系为_________体系。
习题2.2(1)图(2) 习题2.2(2)图所示体系为__________体系。
习题2-2(2)图(3) 习题 2.2(3)图所示4个体系的多余约束数目分别为_______、________、__________、__________。
习题2.2(3)图(4) 习题2.2(4)图所示体系的多余约束个数为___________。
习题2.2(4)图(5) 习题2.2(5)图所示体系的多余约束个数为___________。
习题2.2(5)图(6) 习题2.2(6)图所示体系为_________体系,有_________个多余约束。
静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
qlll /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /32 /3/3q14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q17、求图示刚架横梁中D点的竖向位移。
EI = 常数 。
18、求图示刚架中D 点的竖向位移。
E I = 常数 。
qlll/219、求图示结构A、B两截面的相对转角,EI=常数。
23l/l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll26、求图示刚架中铰C两侧截面的相对转角。
27、求图示桁架中D点的水平位移,各杆EA 相同。
D30、求图示结构D点的竖向位移,杆AD的截面抗弯刚度为EI,杆BC的截面抗拉(压)刚度为EA。
a331、求图示结构D 点的竖向位移,杆ACD 的截面抗弯刚度为EI ,杆BC 抗拉刚度为EA 。
35、图示结构B 支座沉陷 ∆ = 0.01m ,求C 点的水平位移。
36、结构的支座A 发生了转角θ和竖向位移∆如图所示,计算D 点的竖向位移。
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M k M p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
a a9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
ql15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
东北农业大学网络教育学院结构力学网上作业题参考答案(2015更新版)第一章绪论一、填空1、答案:杆件;板壳;实体;杆件2、答案:从实际出发;分清主次,略去细节3、答案:滚轴支座;铰支座;定向支座;固定支座4、答案:相对移动;相对转动;力;力矩5、答案:相对移动;相对转动;力;力矩6、答案:平面杆件结构;空间杆件结构;静定结构;超静定结构7、答案:恒载;活载;固定荷载;移动荷载8、答案:静力荷载;动力荷载;集中荷载;分布荷载第二章平面体系的几何组成分析一、填空1、答案:几何不变;无,有2、答案:材料应变;几何形状和位置;0W3、答案:12-nn;3-4、答案:-125、答案:-36、答案:-10二、选择1、答案:A2、答案:B3、答案:A4、答案:A5、答案:A6、答案:A7、答案:D三、判断1、答案:×2、答案:×3、答案:√4、答案:×5、答案:√6、答案:×7、答案:√四、计算分析题(一)试分析图示体系的几何组成,要求有分析过程。
1、取刚片AB与基础为研究对象,两者通过不交于一点的三根链杆1、2、3相联,构成扩大基础Ⅰ。
2、取扩大基础Ⅰ与刚片BC为研究对象,两者通过铰B和不通过该铰的链杆4相联,构成扩大基础Ⅱ。
3、取扩大基础Ⅱ与刚片CD为研究对象,两者通过铰C和不通过该铰的链杆5相联,构成扩大基础Ⅲ。
结论:该体系为无多余约束的几何不变体系。
(二)试分析图示体系的几何组成,要求有分析过程。
1、取刚片AB与基础为研究对象,两者通过不交于一点的三根链杆1、2、3相联,构成扩大基础Ⅰ。
2、取扩大基础Ⅰ与刚片CD为研究对象,两者通过不交于一点的三根链杆BC、4、5相联,构成扩大基础Ⅱ。
结论:该体系为无多余约束的几何不变体系。
(三)试分析图示体系的几何组成,要求有分析过程。
1、将铰结三角形ADF与铰结三角形BEG看作扩大刚片Ⅰ、Ⅱ。
2、取扩大刚片Ⅰ、Ⅱ为研究对象,两者通过铰C和不通过该铰的链杆DE相联,构成扩大刚片ACBED。
习题7-1 试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a) (b) (c)1个角位移 3个角位移,1个线位移 4个角位移,3个线位移(d) (e) (f)3个角位移,1个线位移 2个线位移3个角位移,2个线位移(g) (h) (i)一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移7-2 试回答:位移法基本未知量选取的原则是什么为何将这些基本未知位移称为关键位移是否可以将静定部分的结点位移也选作位移法未知量7-3 试说出位移法方程的物理意义,并说明位移法中是如何运用变形协调条件的。
7-4 试回答:若考虑刚架杆件的轴向变形,位移法基本未知量的数目有无变化如何变化7-5 试用位移法计算图示结构,并绘出其内力图。
(a)lBl l解:(1)确定基本未知量和基本结构有一个角位移未知量,基本结构见图。
Z 1M 图(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程iql Z ql iZ ql R i r p 24031831,821212111==-∴-==(4)画M 图M 图(b)4m 4m4mC解:(1)确定基本未知量1个角位移未知量,各弯矩图如下1Z =1M 图32EIp M 图(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 1115,352p r EI R ==- 153502EIZ -=114Z EI=(4)画M 图()KN mM ⋅图(c)6m6m9m解:(1)确定基本未知量 一个线位移未知量,各种M 图如下1M 图243EI 243EI 1243EI p M 图F R(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 1114,243p pr EI R F ==- 140243p EIZ F -=12434Z EI=(4)画M 图94M 图(d)解:(1)确定基本未知量 一个线位移未知量,各种M 图如下11Z1111r 252/25EA a 简化a2aa2aaF F P图1pR pp M(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 11126/,55p pr EA a R F ==-126055p EA Z F a -=13a Z EA=(4)画M 图图M(e)l解:(1)确定基本未知量 两个线位移未知量,各种M 图如下图1=11211 EA r l r ⎛⇒=⎝⎭1M221EA r l ⎛=⎝⎭图12 0p p p R F R ⇒=-=p M pF(2)位移法典型方程1111221211222200p p r Z r Z R r Z r Z R ++=++=(3)确定系数并解方程11122122121,4414,0p p p EA r r r l l EA r l R F R ⎛⎫=+== ⎪⎝⎭⎛=+ ⎝⎭=-=代入,解得12p p lZ F EAlZ F EA=⋅=⋅(4)画M 图图M p7-6 试用位移法计算图示结构,并绘出M 图。
5-1 试回答:用单位荷载法计算结构位移时有何前提条件?单位荷载法是否可用于超静定结构的位移计算?aaaaa NCD NCE NBE NAD NBC NAC DE F F 0, F F F F F A B P P P PR R F F F =========-由对称性分析知道N NP 12()F F 1()2 6.832222()P P P cx P F a l F a F a EA EA EA EA EA ⨯⨯-⨯-⨯∆==⨯+⨯+=↓∑5-4 已知桁架各杆截面相同,横截面面积A =30cm 2,E =20.6×106N/cm 2,F P =98.1kN 。
试求C 点竖向位移yC Δ。
25544P P P P F F F ===NAD NAE NEC NEF 由节点法知:对A 节点 F F 对E 节点 F F115(122516(()4)4 11.46 ()N NP yc P P P F F l F F EA EA cm =∆==⨯⨯⨯+⨯⨯+⨯⨯=↓∑NAD NAE 由节点法知:对A 节点 F F5-5 已知桁架各杆的EA 相同,求AB 、BC 两杆之间的相对转角B Δθ。
杆的内力计算如图所示施加单位力在静定结构上。
其受力如图11(12N NP BF F l EA EAθ∆==-∑5-6 试用积分法计算图示结构的位移:(a )yB Δ;(b )yC Δ;(c )B θ;(d )xB Δ。
(a)211232113421yc 1004142B ()1()26()111 ()()()26111 =()30120p llp q q q x x q l q qM x q x x lM x x q q M x M x dx q x x dx EI EI l q l q l EI -=+-=+=-∴∆=⨯=++⎰⎰以点为原点,向左为正方向建立坐标。
显然,A Bq 2q 1lEI22q l 254q l PM l74l M2224113153251315127()()324244342243416yc ql q l l ql l ql l l l l l ql EI EI ∆=⨯⨯+⨯⨯+⨯⨯+⨯⨯+⨯⨯=↓(c)22201()(sin )12(1cos )2()1111[(sin )12(1cos)]2(8-3)-1.42=()EI EIB M R R M R R Rd EIπϕϕϕϕθϕϕϕπ=⨯-⨯-==⨯⨯-⨯-=⎰逆时针l3l 4ABCql EI=常数OAB1kN/m2kNR =2m4mϕθqds qRd θ=20()sin()(1cos )M qRd R qR ϕϕθϕθϕ=⨯-=-⎰2240()sin 111()()(1cos )sin ()2xBM R M M ds qR R Rd qR EI EI EIπϕϕϕϕϕϕϕ=∆==-=←⎰⎰5-7 试用图乘法计算图示梁和刚架的位移:(a )yC Δ;(b )yD Δ;(c )xC Δ;(d )xE Δ;(e )D θ;(f )yE Δ。