结构力学:第六章 结构位移计算
- 格式:ppt
- 大小:3.72 MB
- 文档页数:96



结构力学位移计算公式结构力学是研究结构体系的力学性能和运动规律的学科,是工程力学的一个重要分支。
在结构力学中,位移是一个重要的物理量,它描述了结构体系在受外力作用下发生的变形情况。
位移计算公式是用来计算结构体系的位移的数学公式。
1.剪力梁位移计算公式:在剪力梁中,位移是一个表示结构体系纵向变形的物理量。
当在剪力梁上施加一个集中力作用时,位移可以通过以下公式进行计算:δ=(F*L)/(G*A)其中,δ表示位移,F表示施加在剪力梁上的集中力,L表示剪力梁的长度,G表示剪力梁的剪切模量,A表示剪力梁的截面面积。
2.弹性梁位移计算公式:在弹性梁中,位移是一个表示结构体系纵向变形的物理量。
当在弹性梁上施加一个力矩作用时,位移可以通过以下公式进行计算:θ=(M*L)/(E*I)其中,θ表示位移,M表示施加在弹性梁上的力矩,L表示弹性梁的长度,E表示弹性梁的弹性模量,I表示弹性梁的截面惯性矩。
3.压杆位移计算公式:在压杆中,位移是一个表示结构体系纵向变形的物理量。
当在压杆上施加一个轴向力作用时,位移可以通过以下公式进行计算:δ=(F*L)/(E*A)其中,δ表示位移,F表示施加在压杆上的轴向力,L表示压杆的长度,E表示压杆的弹性模量,A表示压杆的截面面积。
4.梁柱位移计算公式:在梁柱中,位移是一个表示结构体系纵向变形的物理量。
当在梁柱上施加一个集中力作用时,位移可以通过以下公式进行计算:δ=(F*L)/(E*A)其中,δ表示位移,F表示施加在梁柱上的集中力,L表示梁柱的长度,E表示梁柱的弹性模量,A表示梁柱的截面面积。
上述的位移计算公式是基于简化假设和力学理论推导得出的,适用于较为简单的结构体系。
在实际工程设计中,考虑到结构的复杂性和非线性效应,可能需要使用更为复杂的有限元分析等方法来计算位移。
在实际应用中,还需要根据具体情况进行适当的修正和调整,以获得更加准确的位移计算结果。
第6章 结构位移计算6.1 复习笔记【知识框架】【重点难点归纳】一、结构位移的基本概念(见表6-1-1) ★★表6-1-1 结构位移的基本概念二、刚体的虚功原理 ★★★平衡方程是一种直接的受力分析方法,而虚功原理是一种间接手法。
虚功原理是(任意平衡力系)在(任意可能位移)上所做的总虚功为零。
根据虚设对象不同,刚体的虚功原理分两种应用形式(虚力原理、虚位移原理),具体见表6-1-2。
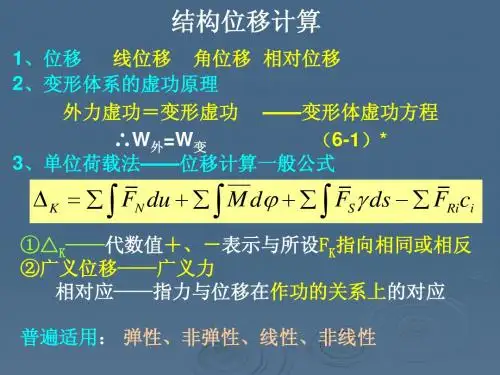
表6-1-2 刚体的虚功原理三、变形体系的虚功原理(见表6-1-3) ★★★表6-1-3 变形体系的虚功原理四、位移计算的一般公式单位荷载法 ★★★★★基于化整为零、积零为整的原则,结构位移的计算从局部变形入手,通过虚力原理中的单位荷载法推导其拉伸、剪切、弯曲变形公式,再对这些局部变形公式进行叠加,得到整体变形公式,最后通过虚功方程推导出位移计算公式,见表6-1-4。
表6-1-4 单位荷载法求变形体系的位移注:为虚设单位荷载在支座处引起的反力;、N、Error!S分别为单位荷载在截面引起的弯矩、轴力、剪力。
拟求位移Δ可以引申理解为广义位移,将结构位移广义化,可以求解两点之间的广义位移。
广义位移、广义单位荷载和外力虚功三者之间满足:W=1·Δ。
单广义位移分类及单位荷载施加方式见表6-1-5。
表6-1-5 单广义位移分类及单位荷载施加方式五、静定结构在荷载作用下的位移计算(见表6-1-6) ★★★★表6-1-6 静定结构在荷载作用下的位移计算注:G为材料的切变模量;A为杆件截面的面积;k为切应力沿截面分布不均匀而引用的改正系数(考试作为已知条件)。
六、图乘法(见表6-1-7) ★★★★★。
结构力学结构位移计算结构位移计算是结构力学中的一个重要内容,它用来分析和计算结构在受力作用下的整体位移情况。
结构位移计算可以通过静力分析和动力分析两种方法进行,静力分析是指结构在静态受力下的位移计算,而动力分析是指结构在动态受力下的位移计算。
静力分析是结构力学的基础,它主要根据结构的初始状态和受力情况,通过应力-应变关系、平衡条件和边界条件等原理进行分析。
静力分析常用的方法有刚度法和应力对应法。
刚度法是基于结构刚度矩阵的计算,通过对于标准结构单元的刚度矩阵进行组装和边界条件的处理,可以得到整个结构的刚度矩阵。
然后,通过对结构受力状态的分析,可以得到结构的受载位移。
应力对应法则是利用结构的应力分布情况,根据材料的本构关系,通过计算得到结构的应变分布情况,然后通过积分等方法,可以得到结构的位移。
动力分析是指结构在动态受力下的位移计算,主要用于计算结构在地震、风载等动力荷载作用下的反应。
动力分析通常包括模态分析和时程分析两种方法。
模态分析是指根据结构的固有振动模态,将结构的运动分解成一系列简谐振动,然后通过分析结构各模态的响应,得到结构的整体位移。
时程分析是指根据结构的动力方程,通过数值积分等方法,求解结构在动力荷载作用下的运动方程,进而计算结构的位移。
在进行结构位移计算时,需要考虑一些基本问题和原则。
首先是边界条件的确定,即结构模型中哪些部分是固定的,哪些部分可以自由移动。
边界条件的选择会直接影响位移计算的结果。
另外,还需要考虑结构材料的本构关系和应力-应变关系的确定,以及结构的几何形状和尺度的影响等。
最后,结构位移计算的结果需要进行后处理和分析。
一般来说,需要对结构的位移进行可视化处理,以便更直观地观察结构的变形情况。
此外,还可以对结构的位移进行动态分析,比如计算结构的振动周期、自由振动频率等,以评估结构的抗震性能和动态稳定性。
总之,结构位移计算是结构力学中一个重要的分析方法,它可以帮助工程师更好地理解和把握结构的受力和变形情况,为结构设计和优化提供重要的参考依据。