路面激励信号
- 格式:doc
- 大小:233.00 KB
- 文档页数:3
傅里叶反变换的路面不平整matlab 程序1.引言1.1 概述概述部分主要介绍本篇文章的主题和背景,以及傅里叶反变换和路面不平整的相关概念。
傅里叶反变换是一种数学工具,能够将频域信号转换为时域信号。
它被广泛应用于信号处理、图像处理等领域,可以用来分析和合成信号。
在路面不平整的研究中,傅里叶反变换也扮演了重要角色。
路面不平整是指道路表面存在起伏、凹凸不平的现象。
由于交通运输的需求和不断增长的车辆流量,路面的平整度变得至关重要。
不平整的路面会影响行车安全、行驶舒适性以及交通效率,因此对于路面不平整的研究和评估具有重要意义。
本文旨在利用傅里叶反变换的原理,设计一种基于Matlab的程序,用于识别和分析路面不平整现象。
通过对实际路面数据的采集,利用傅里叶反变换将频域信号转换为时域信号,从而得到路面不平整的空间分布情况和特征。
文章将以引言、正文和结论三个部分来展开。
引言部分将详细介绍本文的研究背景、目的和结构。
正文部分将重点讲解傅里叶反变换的原理及其在路面不平整研究中的应用。
结论部分将对研究结果进行总结,并讨论本程序在实际应用中的潜在价值。
通过本文的研究,我们期望能够提供一种有效的分析和评估路面不平整的方法,为道路建设和维护提供科学依据,提升道路交通的安全性和舒适性。
同时,本文所开发的基于Matlab的程序也可作为工程实践和学术研究的参考,为相关领域的进一步探索提供支持和借鉴。
1.2 文章结构文章结构的设计对于文章的逻辑清晰度和读者的阅读体验至关重要。
在本文中,我们将以傅里叶反变换的路面不平整MATLAB 程序为主题,通过以下章节来构建文章的结构。
2. 正文2.1 傅里叶反变换在这一部分,我们将介绍傅里叶反变换的基本概念和原理。
首先,我们将对傅里叶变换进行简要回顾,然后详细讲解其反变换的定义和数学公式。
同时,我们将通过示例演示如何使用MATLAB 实现傅里叶反变换,并讨论其在信号处理和图像恢复领域的应用。
铁道车辆平稳性分析1.车辆平稳性评价指标1.1 sperling 平稳性指标欧洲铁路联盟以及前社会主义国家铁路合作组织均采用平稳性指数来评定车辆的运行品质。
等人在大量单一频率振动的实验基础上提出影响车辆平稳性的两个重要因素。
其中一个重要因素是位移对时间的三次导数,亦即z ⃛=ȧ(加速度变化率)。
若上式两边均乘以车体质量M c ,并将之积改写为F ,则M c z ⃛=F 。
由此可见,z ⃛在一定意义上代表力F 的变化率的增减变化引起冲动的感觉。
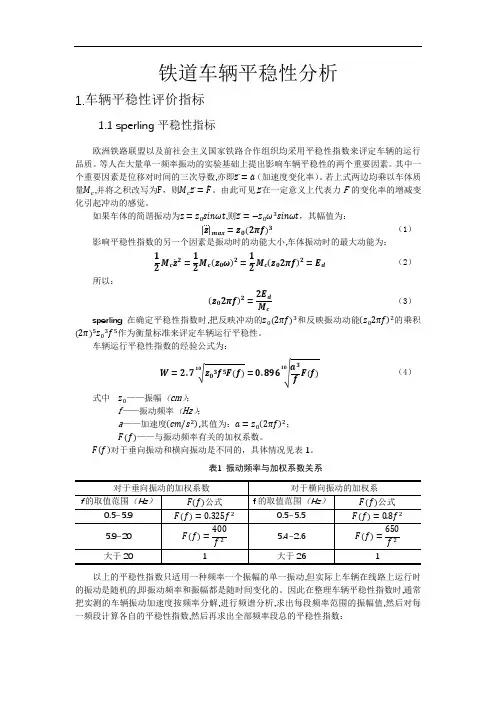
如果车体的简谐振动为z =z 0sinωt ,则z ⃛=−z 0ω3sinωt ,其幅值为: |z |⃛max =z 0(2πf)3(1) 影响平稳性指数的另一个因素是振动时的动能大小,车体振动时的最大动能为:12M c z 2=12M c (z 0ω)2=12M c (z 02πf )2=E d (2)所以:(z 02πf )2=2E dM c(3)sperling 在确定平稳性指数时,把反映冲动的z 0(2πf)3和反映振动动能(z 02πf )2的乘积(2π)5z 03f 5作为衡量标准来评定车辆运行平稳性。
车辆运行平稳性指数的经验公式为:W =2.7√z 03f 5F (f )10=0.896√a 3fF (f )10(4)式中 z 0——振幅(cm );f ——振动频率(Hz );a ——加速度(cm/s 2),其值为:a =z 0(2πf )2; F (f )——与振动频率有关的加权系数。
F (f )对于垂向振动和横向振动是不同的,具体情况见表1。
表1 振动频率与加权系数关系以上的平稳性指数只适用一种频率一个振幅的单一振动,但实际上车辆在线路上运行时的振动是随机的,即振动频率和振幅都是随时间变化的。
因此在整理车辆平稳性指数时,通常把实测的车辆振动加速度按频率分解,进行频谱分析,求出每段频率范围的振幅值,然后对每一频段计算各自的平稳性指数,然后再求出全部频率段总的平稳性指数:W=(W110+W210+⋯+W n10)0.1(5)Sperling平稳性指标等级一般分为5级,sperling乘坐舒适度指标一般分为4级。
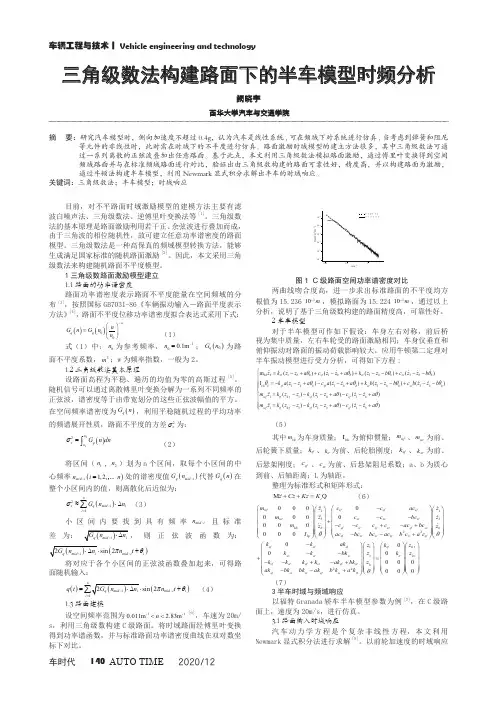
2020/12车辆工程与技术丨Vehicle engineering and technology140车时代AUTO TIME 目前,对不平路面时域激励模型的建模方法主要有滤波白噪声法、三角级数法、逆傅里叶变换法等[1]。
三角级数法的基本原理是路面激励利用若干正、余弦波进行叠加而成,由于三角波的相位随机性,故可建立任意功率谱密度的路面模型。
三角级数法是一种高保真的频域模型转换方法,能够生成满足国家标准的随机路面激励[2]。
因此,本文采用三角级数法来构建随机路面不平度模型。
1三角级数路面激励模型建立1.1 路面的功率谱密度路面功率谱密度表示路面不平度能量在空间频域的分布[3],按照国标GB7031-86《车辆振动输入―路面平度表示方法》[4],路面不平度位移功率谱密度拟合表达式采用下式:()()00wq q n G n G n n −=(1)式(1)中:0n 为参考频率,100.1m n −=;()0q G n 为路面不平度系数,3m ;w 为频率指数,一般为2。
1.2 三角级数法基本原理设路面高程为平稳、遍历的均值为零的高斯过程[5]。
随机信号可以通过离散傅里叶变换分解为一系列不同频率的正弦波,谱密度等于由带宽划分的这些正弦波幅值的平方。
在空间频率谱密度为()q G n ,利用平稳随机过程的平均功率的频谱展开性质,路面不平度的方差2z σ为:()212n z q n G n dnσ=∫ (2)将区间(1n ,2n )划为n 个区间,取每个小区间的中心频率()1,2,mid i n i n −=…,处的谱密度值()q mid i G n −代替()q G n 在整个小区间内的值,则离散化后近似为:()21nz q mid i i i G n n σ−=≈⋅∆∑ (3)小区间内要找到具有频率mid i n −且标准差为:()q mid i i G n n −⋅∆,则正弦波函数为:()()2sin 2q mid i i mid i i G n n n t πθ−−⋅∆⋅+将对应于各个小区间的正弦波函数叠加起来,可得路面随机输入:()()()12sin 2nq mid i i mid i i i q t G n n n t πθ−−==⋅∆⋅+∑(4)1.3 路面建模设空间频率范围为-1-10.011m 2.83m n <<[6],车速为20m/s,利用三角级数构建C 级路面。
第41卷 第5期吉林大学学报(工学版) Vol.41 No.5 2011年9月Jo urnal o f Jilin U niv ersity(Engineering and T echno lo gy Edit ion) S ept.2011路面激励对汽车行驶平顺性影响的传递路径分析李 未1,2,王登峰1,陈书明1,秦 民3,程 超3,陈 振1(1.吉林大学汽车仿真与控制国家重点实验室,长春130022;2.长春大学车辆工程学院,长春130022;3.中国第一汽车集团公司技术中心,长春130011)摘 要:介绍了传递路径分析的基本原理,利用LMS/T PA软件,对某轿车由路面激励通过悬架和车身对驾驶员座椅地板垂直振动加速度的传递路径进行了分析。
通过实车道路试验和室内锤击法试验,详述了汽车振动传递路径分析与试验。
对影响整车行驶平顺性的悬架系统主要传递路径进行了分析识别。
结果表明,路面激励通过前悬架右下控制臂后点对驾驶员座椅地板Z方向振动加速度的贡献较大,尤其是该点Y方向的振动。
要改善该车型的行驶平顺性,应重点对前悬架右下控制臂后点衬套的隔振性能进行改进。
运用T PA方法不仅可以识别出各传递路径贡献量幅值的大小,还可以得到各贡献量幅值之间的相位关系,从而为以整车行驶平顺性为目标的悬架与车身各连结点处的隔振设计提供依据。
关键词:车辆工程;行驶平顺性;传递路径分析;振动源识别;贡献量中图分类号:U467.1 文献标志码:A 文章编号:1671 5497(2011)05 1193 06Transfer path analysis of effect of road surfaceexcitation on vehicle ride comfortLI Wei1,2,WAN G Deng feng1,CH EN Shu m ing1,QIN Min3,CH EN G Chao3,CH EN Zhen1(1.State K ey L abor ator y of A utomobile Simulation and Contr ol,J ilin Univer sity,Changchun130022,China;2.College of Vehicle Eng ineer ing,Changchun Univ er si ty,Changchun130022,China;3.R&D Centr e,China FA W Gr oup Co rp or ation,Chang chun130011,China)Abstract:The fundamentals of the transfer path analy sis(TPA)w as intro duced,the trasfer paths from the road surface excitation thro ug h v ehicle suspension and body to the acceler ation of vertical vibr ation of the flo or under the driver seat w ere analy zed using so ftw are LMS/T PA.T he vehicle road test and the indoo r ham mering test w ere performed to elucidate the vibratio n transfer paths.The dominant tr ansfer path in the suspension system that affects the vehicle ride com fo rt m ost w as identified.The results show that the co ntribution of the rear point of the rig ht low er contr ol arm of the front suspensio n to the Z direction v ibration acceleration of the floor under the driver seat is significant, especially in Y direction.In o rder to enhance the v ehicle ride comfort,the fo cus sho uld co ncentrate at the improv em ent of isolatio n perfo rmance of the bushing in the low er contr ol arm rear point o f the fro nt suspension.The T PA metho d can identify both o f the contr ibution amplitude of every transfer path and the phase r elation am ong each contribution amplitude.It provides a basis for the vibr ation收稿日期:2010 07 27.基金项目:国家自然科学基金项目(50975119);第一汽车集团公司产学研结合项目(A08 JL 021 2009).作者简介:李未(1982-),女,讲师,博士研究生.研究方向:汽车系统动力学与控制.E mail:lw0330@ 通信作者:王登峰(1963-),男,教授,博士生导师.研究方向:汽车系统动力学与控制.E mail:caew df@吉林大学学报(工学版)第41卷isolation desig n of the bushings betw een the junctio ns of the vehicle body and suspensio n.Key words:vehicle eng ineer ing;ride com fo rt;transfer path analysis (T PA );vibration sour ce identification;par tial contributio n汽车行驶平顺性即指汽车不因振动而使乘员感到不舒适或货物不因振动而受损的性能,主要是根据乘坐者的舒适程度来评价[1]。
由度半主动悬架的系统动力学模型。
该模型虽未对车身的侧倾与图1 二自由度1/4半主动悬架式中:m s为簧载质量的数值,单位kg;m t为非簧载质量的数值,单位kg;c0为悬架基础阻尼的数值,单位N/(m/s);c f为可调阻尼系数的数值,单位N/(m/s);k s、k t为悬架刚度系数的数值,N/m;x s为簧载质量位移的数值,单位m;x t为非簧载质量路面的接触性,路面激励的幅值随时间增大而递减,式中:x r(t)为路面垂向位移的数值,单位为频率数值,单位rad/s;v为车速数值,单位量纲;A0为初始路面振幅的数值,单位1.3 随机路面模型随机路面是最接近车辆实际运行工况的路面条件,考虑到路式中:n c为空间截止频率的数值,单位频率的数值,单位m-1;G0为路面不平度系数,无量纲高斯白噪声,无量纲;d为轮距的数值,单位的数值,单位m;x1、x2为状态变量,无量纲。
2 自适应控制策略研究2.1 路面频率识别因路面激励的频率输入与悬架振动的频率有较强的相关性,可通过采集减振器垂向振动的频率来替换路面激励输入的频率。
本文通过采用一阶过零点穿越法对频率进行估算,该算图2 路面频率识别模型式中:F ground为地棚阻尼力的数值,单位阻尼系数的数值,单位N/(m/s)。
2.2.3 SH-GH控制算法原理考虑到天棚控制与地棚控制分别只能改善车辆的平顺性与式如下:式中:F f为天地棚混合控制阻尼力的数值,单位权系数,无量纲。
图3 对扫频路面的识别结果与λground。
其表达式如下式中:λsky、λground分别为天棚控制与地棚控制的自适应增益系数,无量纲。
式中:F sky为天棚阻尼力的数值,单位数的数值,单位N/(m/s)。
2.2.2 地棚控制算法原理地棚控制算法与天棚控制算法的思路类似,假设一个虚拟的4和图5所示。
图4 随机路面下各评价指标对比曲线表1 有无自适应SH-GH 控制的悬架性能对比图5 扫频路面下各评价指标对比曲线性能指标参数被动悬架自适应SH-GH随机路面扫频路面随机路面扫频路面车身垂向加速度/(m/s 2)0.85181.05340.72810.8812轮胎动变形/m0.00190.00760.00180.0069仿真结果表明,配有自适应SH-GH 控制器的半主动悬架的车身垂向加速度(Sprung Mass Acceleration,SMA)与轮胎动变形(Dynamic Tyre Deformation,DTD)的均方根值均有不同程度的下降,具体数值如表1所示。
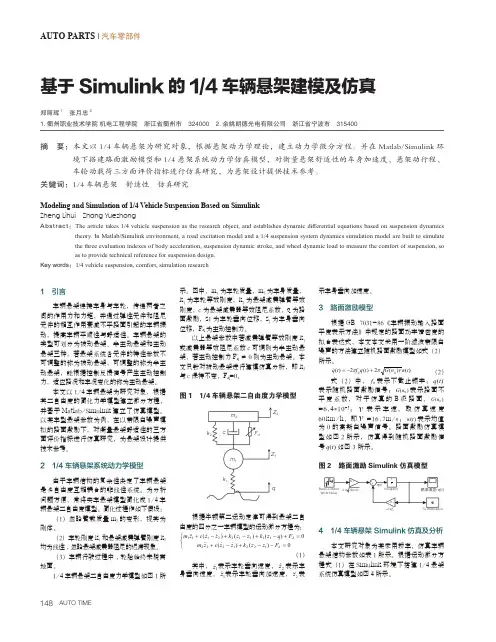
AUTO PARTS | 汽车零部件基于Simulink的1/4车辆悬架建模及仿真郑丽辉1 张月忠21.衢州职业技术学院 机电工程学院 浙江省衢州市 3240002.余姚朗德光电有限公司 浙江省宁波市 315400摘 要: 本文以1/4车辆悬架为研究对象,根据悬架动力学理论,建立动力学微分方程。
并在Matlab/Simulink环境下搭建路面激励模型和1/4悬架系统动力学仿真模型,对衡量悬架舒适性的车身加速度、悬架动行程、车轮动载荷三方面评价指标进行仿真研究,为悬架设计提供技术参考。
关键词:1/4车辆悬架 舒适性 仿真研究1 引言车辆悬架连接车身与车轮,传递两者之间的作用力和力矩,并通过弹性元件和阻尼元件的相互作用衰减不平路面引起的车辆振动,提高车辆平顺性与舒适性。
车辆悬架的类型可划分为被动悬架、半主动悬架和主动悬架三种,若悬架系统各元件的特性参数不可调整的称为被动悬架,可调整的称为半主动悬架,能根据控制反馈信号产生主动控制力,适应路况和车况变化的称为主动悬架。
本文以1/4车辆悬架为研究对象,根据其二自由度的简化力学模型建立微分方程,并基于Matlab/Simulink建立了仿真模型。
以某车型悬架参数为例,在以带限白噪声模拟的路面激励下,对衡量悬架舒适性的三方面评价指标进行仿真研究,为悬架设计提供技术参考。
2 1/4车辆悬架系统动力学模型由于车辆结构的复杂性决定了车辆悬架是多自由度互相耦合的非线性系统。
为分析问题方便,常将实车悬架模型简化成1/4车辆悬架二自由度模型。
简化过程作如下假设:(1)忽略簧载质量m2的变形,视其为刚体。
(2)车轮刚度k1和悬架减震弹簧刚度k2均为线性,忽略悬架减震器阻尼的迟滞现象。
(3)车辆行驶过程中,轮胎始终未脱离地面。
1/4车辆悬架二自由度力学模型如图1所示。
图中,m1为车轮质量,m2为车身质量,k1为车轮等效刚度,k2为悬架减震弹簧等效刚度,c为悬架减震器等效阻尼系数,q为路面激励,z1为车轮垂向位移,z2为车身垂向位移,Fd为主动控制力。
毕业论文说明书路面激励载荷时频域分析研究1 引言1.1 本课题研究的背景及意义随着经济的发展,高等级公路里程的增加,长途客流已成为我国公路运输的主要特征,长距离、长时间的驾驶作业已是平常。
这样使得隔振装置在汽车上发挥着越来越重要的作用,如轮胎、弹簧钢板、减振器、座椅、气囊等等。
这些装置缓和了路面不平传给人体的冲击,衰减了由此引起的振动,给驾驶员和乘员提供了舒适、安全的乘座条件及工作条件,车辆运输路面激励载荷的分析对隔振装置的设计起着关键性的作用。
此外,一些产品在运输过程中,由于包装不当而遭到破坏,这方面的损失是很大的。
产品在运输过程中遭到破坏的主要原因是包装方法、包装材料及包装结构不合理所致,其根本原因就是包装缺乏科学性。
车辆运输路面激励载荷的分析举证了包装产品在振动与冲击作用下的动力学规律。
同时,有助于商家在减振包装的设计方法与设计步骤中做到最好。
本文以汽车运输过程中路面的激励数据为对象,进行随机路面振动激励载荷特性的时频域分析和研究。
实际生活中路面对车辆的激励载荷在垂直、前进、左右三个方向上都存在,由于三个方向上激励载荷的相关性不是很大,且垂直方向上的激励载荷影响最为明显,故我们仅对这一方向上的数据进行分析。
1.2 振动信号的研究及现状车辆在行驶状态下的振动信号是不平稳的,用Fourier分析法和通常的时域分析方法是不能反映出车辆振动的本质特征的,这样也就是车辆的减震降噪相对变得困难。
因为非平稳动态信号的统计特性与时间有关,对非平稳信号的处理需进行时频分析,希望得到时域和频域中非平稳信号的全貌和局化结果[1]。
非平稳振动信号的处理方法中有短时傅立叶分析、Winger-vile分析、小波分析、Hilbert-huang变换和神经网络技术[6]。
短时傅立叶变换(STFT)[15]:通过一个窗口观察信号,将整个信号转化为若干个局部“平稳”的信号,再进而施行傅立叶变换,从而将一维信号映射为时间一频率面内的二维函数。
滤波白噪声路面激励引言白噪声路面激励是指在路面上行驶时,车辆所受到的噪声信号呈现出的随机性和平均分布性。
这种噪声信号对于车辆的振动和噪声控制产生了一定的影响。
为了降低白噪声路面激励对车辆的影响,滤波技术成为一种有效的方法。
本文将探讨滤波白噪声路面激励的原理、方法及其效果。
原理滤波是一种将输入信号中不需要的频率部分去除的过程。
在滤波白噪声路面激励中,滤波技术被用来去除噪声信号中的高频成分,从而降低对车辆的振动和噪声影响。
滤波器可以根据其不同的特性对信号进行处理,常见的滤波器有低通滤波器、高通滤波器和带通滤波器等。
方法滤波白噪声路面激励的方法主要包括模拟滤波和数字滤波两种。
模拟滤波模拟滤波是指通过电子元器件对信号进行实时处理的方法。
在滤波白噪声路面激励中,模拟滤波器一般采用模拟电路来实现。
根据需要滤除的频率范围,选择不同类型的滤波器,如RC滤波器、LC滤波器或活性滤波器等。
模拟滤波器的优点是实时性好,但其性能受到电路元器件的限制,且对温度等环境因素较为敏感。
数字滤波数字滤波是指通过数字信号处理的方法对信号进行处理。
在滤波白噪声路面激励中,数字滤波器一般采用数字信号处理器(DSP)或者嵌入式处理器来实现。
数字滤波器的优点是参数可调性强,可以根据需要对滤波器进行优化,且不受环境因素的影响。
数字滤波器的处理过程包括采样、滤波和重构等步骤,其中滤波过程是最关键的一步。
效果滤波白噪声路面激励的效果主要体现在降低车辆振动和噪声水平两个方面。
降低振动水平白噪声路面激励会产生不规则的振动信号,对车辆的悬挂系统和车身结构会造成较大的振动。
通过滤波处理,可以有效地去除噪声信号中的高频成分,减小车辆振动的幅度,从而提升行驶的舒适性和稳定性。
降低噪声水平白噪声路面激励会产生较大的噪声信号,对车内的噪声水平会产生明显的影响。
通过滤波处理,可以在保持信号的基本特性不变的情况下,去除噪声信号中的高频成分,减小车内噪声的水平,提升车内的静谧性和舒适性。
4.5 车辆悬架性能评价指标的描述车辆悬架作为车体与车轴的连接部件,缓和来自于地面的冲击,衰减各种动载荷引起的振动。
因此对悬架控制性能的评价可以通过车辆的平顺性(驾乘舒适性)、车轮与路面可靠接触性、轮胎的动载荷以及悬架的动行程工作空间等各项指标进行,而具体评价指标的选取则与车辆悬架的设计目标有关。
在本文中,为满足研究的需要,将从车辆的平顺性、轮胎的动态力与车辆悬架的动行程工作空间三方面确定相应的评价指标。
4.5.1车辆平顺性的评价指标通常情况下,车辆的平顺性能可由簧载质量的加速度响应来评价。
在车辆的各项性能评价中,以平顺性的评价最为困难和复杂,因为人体对机械振动的反应不仅取决于振动的强度、频率、以及作用时间,而且取决于人的心理和生理状态。
所有这些不确定的主观因素均影响着人体对振动的反应程度,为此如何进行定量的评价,一直是一个有争议的问题。
在本文的研究中,对于连续振动类型的路面输入可以采用簧载质量的加速度传输率(T as )进行悬架平顺性的性能评价[51]。
其中传输率描述了悬架系统的共振传输率和对振动隔离的程度。
鉴于MR 组尼器的非线性,加速度传输率定义为在给定激励频率下簧载质量加速度的均方根(RMS )对激励加速度信号均方根的比率)()()(T i s s f a f a f a = (4-15)其中,)(f a s 和)(f a i 分别是簧载质量加速度和激励加速度信号对于给定激励频率f 的均方根。
⎰=T s s dt t x T a 02)(1 和⎰=T i i dt t x Ta 02)(1 (4-16)其中,T 是加速度信号的持续时间。
对于冲击作用类型的路面输入可以采用簧载质量冲击位移率和加速度率(SDR s ,SAR s )来评价[52]。
分别定义为位移和加速度响应的峰值对激励位移和加速度峰值的比率。
)](max[)](max[t x t x SDR i s s =和)](max[)](max[t x t x SAR i s s =;L T t ≤≤0 (4-17) 其中,T L 是加速度信号的持续时间。
只考虑路面不平度激励时的车辆纵向振动一、二自由度模型41车辆纵振模型其中,h q 为车辆纵振位移输入,21k k ,分别为轮胎和悬架的纵向刚度,2c 为悬架纵向阻尼,21m m ,分别为非悬挂质量和悬挂质量,21h h x x ,分别为非悬挂质量和悬挂质量的纵向位移。
振动方程为:Q F Z Z M t =++K Z C 。
式中,⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=21222221C x x Z c c c c m m M ,, {}h t q k F k k k k k K =⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--+=Q 0122221,, 二、车辆纵振路面谱)(0n G qh参照垂直路面谱得到:()()wq qh nn n G n G ⎪⎪⎭⎫ ⎝⎛=00 式中,n 为空间频率)(1-m ;0n 为参考空间频率,11.0-=m n o ;)(0n G q 为路面不平度系数,单位为312m m m =-;W 为决定路面功率谱密度的频率结构的频率指数。
时间功率谱密度)(f G qh 为:W W Wq W q qh qh f u n n G n n n G u n G u f G 10000)())((1)(1)(--===三、悬架参数对纵振特性的影响路面确定的情况下,纵振特性主要与221c k k ,,有关。
3.1纵向平顺性评价1.推荐水平方向频率的加权函数为()()()⎩⎨⎧<<<<=802225.01f ff f w d2.车辆纵向平顺性的加速度标准方差为(总加权法)()()21221⎥⎦⎤⎢⎣⎡=⎰f f ah hwh df f G f W a3.2悬架参数对车辆纵振影响的仿真 。
四、结论车辆纵振模型与垂向类似,纵振路面谱与垂向类似,纵振模型和纵振路面谱是研究车辆纵振的理论基础。
用总加权值法评价车辆纵振平顺性,悬架刚度增大悬架平顺性恶化;悬架阻尼增大,平顺性趋于优化。
道路路面谱测量中数字信号处理应用综述作者:何方方来源:《世界家苑·学术》2017年第07期摘要:道路路面不平度数据是车辆工程试验中研究外部输入激励的主要成分,影响车辆行驶的平顺性、乘坐舒适性、操纵稳定性、零部件疲劳寿命、运输效率、油耗等各个方面,在汽车工程领域中,常常使用道路谱,即路面不平度曲线的功率谱密度来反映路面的质量好坏。
本文对道路路面谱的测量方式、测试系统构成及信号的处理、曲线拟合及光滑等技术手段进行了简要综述。
关键词:道路路面谱;信号处理;FFT1、路面谱的简介道路路面不平度数据是车辆工程试验中研究外部输入激励的主要成分,影响车辆行驶的平顺性、乘坐舒适性、操纵稳定性、零部件疲劳寿命、运输效率、油耗等各个方面,在汽车工程领域中,常常使用道路谱,即路面不平度曲线的功率谱密度来反映路面的质量好坏。
因此准确获取某个地区的道路路面平整度和路面能量分布的总体概况就显得非常重要,只有获得了能够代表地区典型特征的道路谱,车辆设计开发人员才能有针对性的设计和开发车辆,才能准确地了解开发车辆的性能是否满足在该路该地区的道路上行驶。
2、路面谱的生成方法目前的车辆工程研究中,选择道路谱曲线,即道路路面不平度数据的功率谱密度PSD (Power Spectral Density)曲线作为车辆外部输入的主要分析工具。
PSD是将道路断面看成由不同特性的短波、中波及长波组成,通过分析不同频率下的高程、速度、加速度的方差来分析路面断面的不平整性。
经过车辆振动系统作用后的功率谱分析可以比较不同波长下输入、输出的变化,从而知道平整度敏感的频率范围,有利于评价动力反应类平整度的特征,也为车辆振动系统的优化提供分析基础,故此在道路工程和车辆工程中被大量采用。
然而工程师们往往使用的是一条随机路段的PSD曲线,或者是一条仿真路面数据的PSD曲线,这些都不能在总体上、全局上,反映一个地区的路面特征,不利于汽车厂商针对不同的地区进行区域化分析和区域化车辆市场的投放和研发,因此为了能够能够生成代表地区或者道路类型的典型道路谱往往采用典型路段的选取和测量、道路谱计算和滤波、典型道路谱的提取三个步骤来完成。
客车车桥路面激励谱分析0 引言车桥是车辆的主要传力件和承载件,它起着支撑车辆荷重,将动力传导到驱动轮上的作用,是车辆上各种复杂力的集合点[1]。
传统的结构设计和检验方法多数是基于静态分析的结果,按照相应的强度理论进行的。
但车辆在行驶过程中,往往发生很大的振动。
根据经验和理论研究,引起桥壳破坏的主要原因是作用在车桥上的,由于路面不平度引起的冲击力和各种复杂工况下的作用力[2],这些动载荷引起的动应力往往比静态应力大出好多倍。
因此,找出车辆正常行驶在路面状况下车桥的振动位移和动应力分布,对防止车桥破坏建立一个可以遵循的安全设计依据,有着非常重要的现实意义。
1 车桥的振动力学模型1.1 车桥的振动模型在研究汽车振动问题时,路面不平度是汽车振动的基本输入。
汽车在行驶过程中,车轮与路面间的相互作用力在不断变化,这些变化与路面形状及其不平度度、汽车零部件的惯性和弹性特性有关。
在以往的研究中,通常把汽车车身质量看作为刚体的7 个自由度的立体振动模型,4 个自由度的振动平面模型,或者是2 个自由度的双质量系统振动模型,也有分析车身垂直振动的单质量系统模型。
本文主要研究车桥在路面激励下的动态特性,因此将桥壳作为弹性体来考虑,建立的车桥振动分析力学模型。
其中:K 为悬挂刚度,C 为减振器阻力系数,Kt 为轮胎刚度。
1.2 二自由度振动模型当悬挂质量分配系数的数值接近1 时,前后悬挂系统的垂直振动几乎是独立的[3],可以将双轴汽车的4 个自由度的振动模型简化为2 个自由度振动系统。
根据所示的2 自由度车辆振动模型,运用牛顿运动定律,建立系统的运动微分方程[4],即:式中,m1 为车轮质量;m2 为车身质量; x 0 为路面位移x1 为车轮位移x2 为车身位移;K1 为轮胎刚度;K2 为悬架弹簧刚度;C2 为悬架阻尼;x1为车轮加速度;x2 为车身加速度。
2 车桥的路面激励仿真2.1 路面激励模拟在进行动力学分析研究时,通常是在时域里进行的,为了能更真实地反映路面谱在低频范围内近似为水平的实际情况,选取滤波白噪声作为路面输入模型为:式中,f0 为下截止频率,Hz;G0 为路面不平度系数,m3/cycle;v0 为车速,m/s;ω 为均值为零的随机输入单位白噪声。
滤波白噪声路面激励一、引言滤波白噪声路面激励是指通过滤波器对白噪声进行处理,生成一种类似于路面激励的信号。
这种信号可以在实验室中用于测试车辆的性能,也可以用于评估道路的质量。
本文将从以下几个方面对滤波白噪声路面激励进行详细介绍。
二、什么是白噪声?白噪声是指在所有频率上功率谱密度相等的随机信号。
在时间域上,它表现为均匀分布的随机振荡。
由于其功率谱密度相等,因此其频率分布呈现为一个平坦的线性谱。
三、什么是滤波?滤波是指通过某种方法将信号中某些频率成分削弱或去除的过程。
常见的滤波方法包括低通滤波、高通滤波、带通滤波和带阻滤波等。
四、如何生成滤波白噪声?生成滤波白噪声需要先产生一个白噪声信号,然后通过一个特定的滤波器将其转化为类似于路面激励的信号。
具体步骤如下:1. 产生白噪声信号:可以使用电子设备或计算机程序产生白噪声信号。
在实验室中,通常使用声学发生器或数字信号发生器产生白噪声信号。
2. 设计滤波器:根据需要生成的路面激励信号特性,设计一个合适的滤波器。
常用的滤波器类型包括巴特沃斯滤波器、切比雪夫滤波器和椭圆滤波器等。
3. 滤波处理:将白噪声信号通过设计好的滤波器进行处理,得到类似于路面激励的信号。
五、如何评估路面质量?使用滤波白噪声路面激励可以评估道路的质量。
通过将该信号输入到车辆悬挂系统中,可以测量车辆在不同频率下的响应,并据此评估道路表面的平整度和纵向坡度等参数。
六、如何测试车辆性能?除了用于评估道路质量外,滤波白噪声路面激励还可以用于测试车辆性能。
通过将该信号输入到车辆悬挂系统中,可以测量车辆在不同频率下的响应,从而评估车辆的悬挂系统性能和舒适度。
七、结论滤波白噪声路面激励是一种非常有用的实验方法,可以用于评估道路质量和测试车辆性能。
通过合理设计滤波器和选择合适的白噪声信号源,可以得到满足实验需求的路面激励信号。
编号毕业设计(论文)题目路面随机激励下的汽车振动仿真目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1。
1 振动的危害 (1)1.2 振动研究的问题 (1)1。
3 研究机械振动的基本方法 (2)1。
4 汽车振动问题 (3)1。
5 振动分析有限单元方法 (3)1.6 Simulink简介 (4)2 路面随机激励模型 (5)2。
1 基本概念 (5)2。
2 路面随机激励时域模型 (5)2.3 白噪声法建立路面数学模型 (5)2.4 用matlab/simulink进行仿真 (7)3 建立整车4自由度模型 (9)3。
1 汽车振动模型 (9)3。
2 系统运动微分方程的建立 (11)4建立matlab/simulink仿真模型 (13)4.1 建立动态系统模型的要素 (13)4.2 动态系统建模概述 (13)4。
3 建立汽车振动系统仿真模型 (14)5振动仿真分析 (15)5。
1 simulink动态系统仿真过程 (15)5。
2 选取汽车模型参数 (16)5。
3 仿真分析 (16)5.4 研究悬架刚度的影响 (19)6结论 (25)致谢 (26)参考文献 (26)摘要当今社会,汽车在人们的日常生活中占据着越来越重要的作用,人们对于汽车也提出了越来越高的要求.进入新世纪以来,汽车技术取得了巨大的发展,汽车各方面的性能也取得了巨大的进步。
人们对于汽车的研究越来越全面,对于汽车振动的研究已经成为了汽车研究中重要的课题之一.然而,由于汽车是一个包含惯性、弹性、阻尼等动力学特征的非线性系统,零件多,受力复杂,而且构成汽车的各子系统之间存在相互耦合作用,使得汽车的动态特性非常复杂.要想真实描绘汽车的动态特性,必须考虑尽可能多的零件运动来获得精确的数学模型,而太复杂的模型又给求解带来了巨大的困难,甚至得不到结果.因此,本文以整车4自由度为对象,通过仿真技术的运用,来研究在路面随机激励下汽车的振动特性,研究结果可以对汽车平顺性研究提供参考。
4.4路面激励信号的描述
通常情况下,车辆振动主要来自于三方面因素的影响[3]:
➢ 路面的不规则度对车辆的干扰激励;
➢ 由加速、制动、转向等运动状态变化和由阵风引起的空气动力载荷造成的车身振动; ➢ 动力传动系的扭转振动通过耦合而诱发的整车振动。
其中路面的不规则度是车辆行驶中,产生振动的主要原因,而后两种振动方式的存在都需要一定条件,而且形成的机理与分析较为复杂,因此在大多数车辆平顺性研究中,都以路面的不规则度作为车辆悬架系统的外界干扰输入。
一般情况,路面输入大致可以分为连续振动和冲击作用两类:
➢ 连续振动:指沿道路长度方向的连续激励,例如沥青路面、搓板路面;
➢ 冲击作用:指在较短时间内的离散事件,并且有较高的强度,如坑洞、猫眼式反光路标、混凝土路面的裂缝等。
结合本课题研究的需要,本文主要采用三种路面激励信号。
根据其性质的不同,分成确定性路面信号和随机性路面信号两类。
4.4.1 确定性路面信号
车辆悬架的基本性能一般可由式(4-12)所示的谐波激励下系统的频率响应来描述。
)2sin(ft a x m in π= (4-12) 其中,a m 和f 分别代表是幅值和频率。
由于系统在固有共振频率点将产生最大的振幅,为此,本论文在系统时域响应的研究中,所选取的频率f 在第一共振频率点f n-s0附近(1.5Hz 左右),主要用于评价车辆平顺性(驾乘的舒适性)。
对于非线性系统,恒定幅值的谐波激励会导致在高频下产生较大的加速度激励信号,这会引起较大的惯性力和悬架部件的饱和。
因此,理想的情况应该是在高频时限制位移谐波激励信号的幅度。
为此,在本文中采用了分段谐波激励信号[52],以满足在高频时限制位移谐波信号幅值的要求。
如式(4-13)所示
⎩⎨⎧>≤=T T m T m in f f ft f f a f f ft a x )2sin()/( )2sin(ππ (4-13)
上述函数在低频f ≤ f T 时产生恒定幅值激励信号,在高频f> f T 时产生恒定加速度激励信号。
其转折频率f T 选为2.1Hz ,是第一共振频率f n-s0的2倍,选择的激励频率范围从0到15Hz ,涵盖了车辆平顺性分析的主要频率范围。
车辆在行使的过程中经常遇到路面坑洼状态,不可避免的会对车辆会产生冲击的干扰。
为了衡量车辆悬架的冲击隔离特性,本论文采用了平滑脉冲信号激励进行评价[52]。
该激励信号由(4-14)式给出:
,3,2,1;)(25.00202==-μμωμωt m in e t e a x (4-14)
式中a m 是平滑脉冲信号的幅值,ω0是基波频率,μ是脉冲刚度参数。
较大的μ值会使激励产生较大的冲击和加速度信号。
图4-4示出了平滑脉冲信号各参数变化对波形的影响。
4.4.2 随机性路面信号
车辆悬架的性能特性受随机路面所含频率分量幅度和频率的严重影响,因此除了确定性激励信号外,车辆悬架控制特性还可由代表性的实测路面随机信号激励下的系统响应来评价。
本文采用了加拿大报道的某公路实测路面随机数据[55]。
对三种大约500m 路面每隔0.3m 的进行标高测量,并因此分为平滑、中等粗糙和粗糙三种等级,对所测数据进行滤波处理后,这三种路面的峰值标高分别为4、7.5和15mm 。
(b)参数a m 变化对平滑脉冲信号的影响
(a)参数μ变化对平滑脉冲信号的影响 图4-4 参数变化对平滑脉冲信号的影响 (c)参数ω0变化对平滑脉冲信号的影响
(a)不同路面的轮廓(空间频率)(b) 车速为50Km/h时不同路面的PSD轮廓(时域)
(c) 车速为100Km/h时不同路面的PSD轮廓(时域)
图4-5 某公路实测路面随机数据
图4-5(a)给出了上述实测路面的随机数据通过快速傅里叶变换进行的频谱分析结果。
并
且在恒定车速分别为50km/h及100km/h两种情况下,将所测的空间随机信号转换为时域随机
信号,分别如图4-5(b)和图4-5(c)所示。
结果表明不同路面的主导波长频率在0-2cycle/m范围,且其功率谱密度(PSD)幅值随路面粗糙度的增加而增加,同时还表明功率谱密度(PSD)
幅值随车速的增加而减小。