各种激励信号的设置及瞬态分析 2
- 格式:doc
- 大小:152.50 KB
- 文档页数:6
瞬态信号分析与处理在旋转机械状态监测与故障诊断过程中,通常将启、停机过程的信号称为“瞬态信号”。
相对于此,将机器正常运行时的信号称为“稳态信号”,这是一种特定场合下的习惯叫法。
在启、停机过程中,转子经历了各种转速,其振动信号是转子系统对转速变化的响应,是转子动态特性和故障症兆的反映,包含了平时难以获得的丰富信息。
特别是通过临界转速时振动、相位的变化信息。
因此,启、停机过程分析是转子检测的一项重要工作。
需要说明的是,为实现对机器启、停机信号的采集并为瞬态信号的分析提供条件,要求对信号进行同步整周期采集,这就需要引入键相位信号,以实现转速的测量和采集的触发。
如果不能引入键相位信号,那么对瞬态信号的采集就不完整,分析的结果也就不完整,特别是相位谱,就没有明确的物理慨念。
用于启、停机过程瞬态信号的分析方法很多,除轴心轨迹、轴心位置和相位分析以外,主要通过奈奎斯持图、波德图和瀑布图来了解启、停机过程的特性。
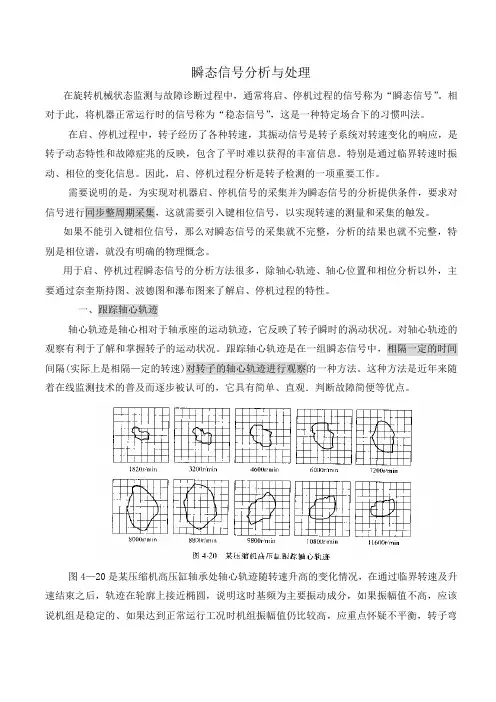
一、跟踪轴心轨迹轴心轨迹是轴心相对于轴承座的运动轨迹,它反映了转子瞬时的涡动状况。
对轴心轨迹的观察有利于了解和掌握转子的运动状况。
跟踪轴心轨迹是在一组瞬态信号中,相隔一定的时间间隔(实际上是相隔—定的转速)对转子的轴心轨迹进行观察的一种方法。
这种方法是近年来随着在线监测技术的普及而逐步被认可的,它具有简单、直观.判断故障简便等优点。
图4—20是某压缩机高压缸轴承处轴心轨迹随转速升高的变化情况,在通过临界转速及升速结束之后,轨迹在轮廓上接近椭圆,说明这时基频为主要振动成分,如果振幅值不高,应该说机组是稳定的、如果达到正常运行工况时机组振幅值仍比较高,应重点怀疑不平衡,转子弯曲—类的故障。
二、波德(Bode)图波德图是描述某—频带下振幅和相位随过程的变化而变化的两组曲线。
频带可以是1x、2x 或其他谐波;这些谐波的幅值、相位既可以用FFT法计算,也可以用滤波法得到。
当过程的变化参数为转速时,例如启、停机期间,波德图实际上又是机组随激振频率(转速)不同而幅值和相位变化的幅频响应和相频响应曲线。
【教程】PSpice的4种基本仿真分析详解PSpice A/D将直流工作点分析、直流扫描分析、交流扫描分析和瞬态TRAN分析作为4种基本分析类型,每一种电路的模拟分析只能包括上述4种基本分析类型中的一种,但可以同时包括参数分析、蒙特卡罗分析、及温度特性分析等其他类型的分析,现对4种基本分析类型简介如下。
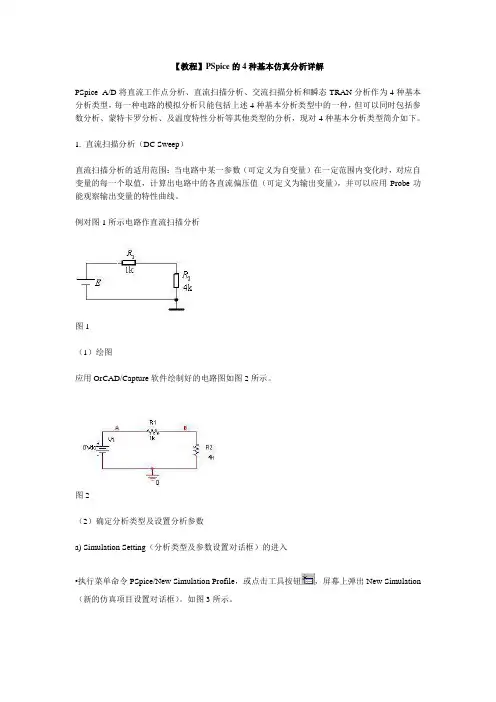
1. 直流扫描分析(DC Sweep)直流扫描分析的适用范围:当电路中某一参数(可定义为自变量)在一定范围内变化时,对应自变量的每一个取值,计算出电路中的各直流偏压值(可定义为输出变量),并可以应用Probe功能观察输出变量的特性曲线。
例对图1所示电路作直流扫描分析图1(1)绘图应用OrCAD/Capture软件绘制好的电路图如图2所示。
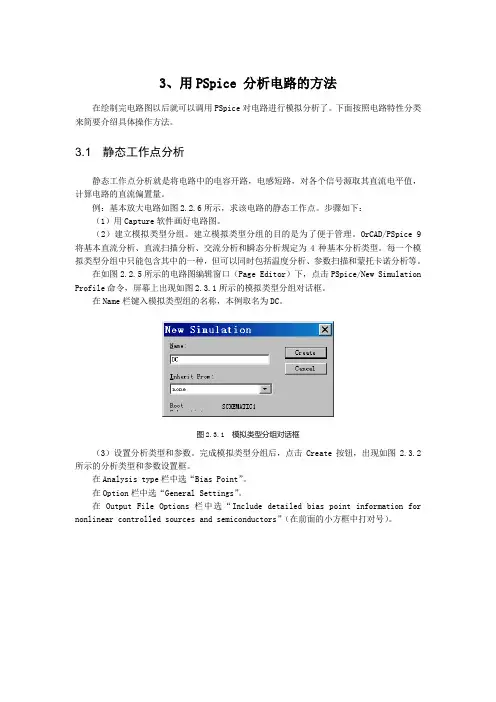
图2(2)确定分析类型及设置分析参数a) Simulation Setting(分析类型及参数设置对话框)的进入•执行菜单命令PSpice/New Simulation Profile,或点击工具按钮,屏幕上弹出New Simulation (新的仿真项目设置对话框)。
如图3所示。
图3•在Name文本框中键入该仿真项目的名字,点击Create按钮,即可进入Simulation Settings(分析类型及参数设置对话框),如图4所示。
图4b)仿真分析类型分析参数的设置图2所示直流分压电路的仿真类型及参数设置如下(见图4):•Analysis type下拉菜单选中“DC Sweep”;•Options下拉菜单选中“Primary Sweep”;•Sweep varia ble项选中“V oltage source”,并在Name栏键入“V1”;•Sweep type项选中“Linear”,并在Start栏键入“0”、End栏键入“10”及Increment栏键入“1”。
以上各项填完之后,按确定按钮,即可完成仿真分析类型及分析参数的设置。
另外,如果要修改电路的分析类型或分析参数,可执行菜单命令PSpice/Edit Simulation Profile,或点击工具按钮,在弹出的对话框中作相应修改。
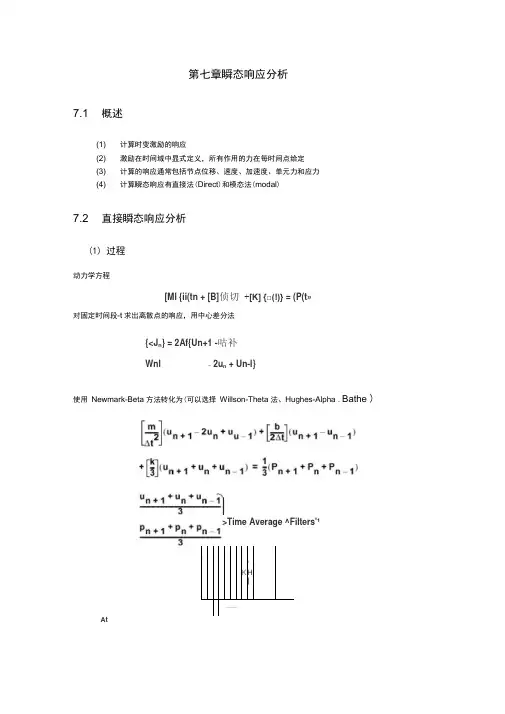
第七章瞬态响应分析7.1 概述(1) 计算时变激励的响应(2) 激励在时间域中显式定义,所有作用的力在每时间点给定(3) 计算的响应通常包括节点位移、速度、加速度、单元力和应力(4) 计算瞬态响应有直接法(Direct)和模态法(modal)7.2 直接瞬态响应分析(1)过程动力学方程[Ml {ii(tn + [B]侦切 +[K] {□(!)} = (P(t»对固定时间段-t求出离散点的响应,用中心差分法{<J n} = 2Af{Un+1 -咕补Wnl _ 2u n + Un-l}使用Newmark-Beta 方法转化为(可以选择Willson-Theta 法、Hughes-Alpha . Bathe )r-'K ’H ]----------------At>Time Average ^Filters'1整理得到內%"} = [A 2]HA 3l{U n } + LA <]l u n _1}其中,气]=M + B/ 2At + K/3|Dynamic MatrixApplied ForceA 3| = |2M/At 2-K/3| IA 4I = [ M/At 2 + B/2At-K/3|(2)瞬态响应分析中的阻尼B = B 1 + B 2 + G WgK 1 + 1/W 4yG E K E其中,B 1 =阻尼单元(VISCQAMP ) + B2GGB 2 = B2PP 直接输入矩阵+传递函数 G =整体结构阻尼系数(PARAM,G )W 3 =感兴趣的整体结构阻尼转化为频率-弧度/秒(PARAM,W3) K 1 =整体刚度矩阵G E =单元结构阻尼系数(GE 在MATi 卡中定义)W 4 =感兴趣的单元结构阻尼转化为频率-弧度/秒 (PARAM,W4) K E =单元刚度矩阵瞬态响应分析中的不允许复系数,因此 结构阻尼转化为等效粘性阻尼进行计算W3,W4的缺省为0,这时不计阻尼7.3 模态瞬态响应分析(1)过程物理坐标与模态坐标变化无阻尼的动力学方程A2' =Initial Conditions, a from Previous Time Step[M]{U} + [K|{u} = {P(t})变换得到[0T|[M]|(|>||^+|Q T|[IK||Q H5}■ [<h T]{P(t)}其中,= modal mass matrix (diagonal)0T K. J= modal stiffness matrix (diagonal) 『P = modal force vector解耦得到单自由度系统方程m占* 昭=Pj(t)其中,m| = i-th modal mass k; = i-th modal stiffness当存在阻尼时申T R即工diagonal宀1心屮} = lA2l*|A3lU n HlA4l{^n_p其中,^2 二割"+ 1 * ^*n +-1 ' Applied ForceInitial Conditions, >from Previous Time S怕p(2)模态瞬态响应分析中的阻尼使用模态阻尼,每阶模态都存在阻尼,方程变为解耦的方程m占 * bj£ * = Pjd)勺+ 2勺勺+以勺=i/mjpdi 卜th modal forceDynamic Matrix I® -〔"段帥Cj =严j = modal damping ratio= k|/ nij = modal frequency (eigenvalue)利用Duhamel积分得到(3) Nastran 中模态瞬态响应分析阻尼的输入・ TABDMP1 (Bulk Data entry defines the modal damping ratios.© = b/b cr = G/2 Q ==1/GExample: for 10% critical clampingCRIT = 0.10Q = 5.0 G-0.2a) TABDMP1卡用SDAMPING=ID 情况控制卡选择 b) f i (Hz)和g i 为频率和阻尼值,用线性内插值给定点间的频率,用线性外插值给定端点外的频率;如其中,TAHDMP1 ID TYPEMBC tAHC<191 f2 H92*3 r 93+ DLF+ DLF9s—■EN J IO, No Initial Condition^ Are Allowed in MSC/M ASTRA IM forModal Transient Response• Type = G (default), CRIT, or QC)定义非模态阻尼(PARAM, G; VISC; DAMP; GE on MAT!(4) 模态瞬态响应分析数据的提取a) 物理响应为模态响应的叠加u =冷Hg}b) 计算量一般不如直接法大c) 不必输出每个时间步的值(5) 模态截断原因:a) 不需要所有模态,仅须很少的低阶模态就可以得到满意的响应b) 用PARAM,LFREQ 给出保留模态的频率下界c) PARAM,HFREQ 给出保留模态的频率上界d) PARAM,LMODES 给出保留模态的最小数目e) 截断高频模态即截断了高频响应7.4 瞬态激励力定义为时间的函数Nastran中定义方法・ TLOAOI"Brut目force TB; ordorod time, force pairs tzblm input* TLOAD2Efficient definition for analytical'type loadlings-LSEQ Generates dynamic loads from Static loads1) 时变载荷a) TLOAD1定义的载荷其中,DAREA (or LSEQ) entry DELAY entry =TABLEDi entryb) TLOAD2定义的载荷,t< 0 or t> T 2-T 1At B e Ct cos (2rcFt+<2) TLOAD 卡片P(t) ■ AF(t - i)F{t-T )= TABLEDi entrya) DELAY 定义自由度及时间延迟量 b) TABLEDi 定义时间和力对 C)由DLOAD 情况控制卡选择 d)TYPE 定义为3) TLOAD 2 卡片A= spatial load distribution and scale factor(DAREA or LSEQ) T= DELAY entry其中,0 t < 0 ar t > T2 —1 23^)56789 10TLOAD2 SID A TYPE Fl T2 F p ~C~A Defined as a spatial load distribution and scale factor (DAREAor LSEQ)T Defined on a DELAY entry (can only ba used with a DAREA entry)TYPE Defined as TLOAD1T1,T2FPTime constants (T2>T1)Frequency (Hz)Phase angle (degrees)C Exponential coefficientB Growth coefficient该卡片由情况控制卡DLOAD选取4)载荷的组合其中,S c = overall scale factorS K = scale factor for k-th load setP K諱SID of TLOAD12 3456789 10DLOAD I—SID I~~S]~~~~~注:a)TLOAD1 和TLOAD2 标号唯一b)用DLOAD 组合TLOADsc)由情况控制卡DLOAD选取5)DAREA卡At^e^t cos(2irFt ■+ P)定义动态载荷作用的自由度,与其他卡片关系DAREA 例子□LOAD = 35fl 7 3910TLOAD1SID DAWEATYPETlDTLOAD1 35 2931340DAREA SIDPOINT DDUP'ONCMTSCALE□AREA"SO -~1~5.2DELAYSID POINT CCM^UNENTLAGDELAY3130~T~0.2TABLED1ID XAXIS YAXISXIY1X2Y2X3Y3¥4TABLED140-3.0 4.0 2.0 5.6 60 5.6ENDT• Result is the load specified by the TLOAD1, scaled by 5,2, delayed by 0.2 seconds, and applied to grid point 30 component T1.6) SLEQ 卡片将静态载荷用为动态载荷 由情况控制卡LOADSET 选取 包括含一个DAREA 卡片,与其他卡片关系DLOADCase Control Bulk DataScale Factor DOF I Spatial DistributionTime Lag DOFTemporal DistributionLSEQ例子LOADSET = 27 □ LOAD = 25LSEQ SID□AREA LIDLSEQ2728V26TLOAD1SID DAREA\TLOAD12528\STATIC LOAD SID\\、DAREAPLOAD126ReferenceFORCE26Link7)初始条件a)瞬态响应分析中,初始位移与初始速度由TIC数据卡定义,在模态响应分析中无效b)由IC情况控制卡片选择c)未被约束的自由度为0d)由一个A-set DOFs.给定e)初始条件仅须在直接瞬态响应中给定,模态瞬态响应中为0f)初始条件用于计算{u 1 }时需要的{U 0 }, {u -1 },{P 0 }, {P -1 },所有点的初始加速度设置为0 (t<0)= |K]{u0} + |BHu0J建议对任何类型的动态激励至少取一个时间步为0□LOAD LOADSET Ca關CgntrpIBulk DataDynamicLoadStaticLoadEntriesTemporalDistributionReferenceLinkSpatialDistribution□AREAForceTimeg)TIC卡定义初始条件其中,Field ContentsSlD ki&nlificabon number. (Irteg&r 0)G Grid, scalar, w atra point iderMificatiod number. > □)C Conpon^nl nimbars. fliM 旳er zero or blank tot scalar or &t\r& poirilg r any nn© al the inl^g^rA1 tnraogh 6 (or a grid p<^nl.)U0 Initial displaoefinenL {Real}VO Initial velocity. (Real)8)TSTEP卡a)定义直接瞬态响应和模态瞬态响应分析中的积分时间步长b)积分误差随频率的增加而增加c)建议在响应的一个周期内至少取8个时间步d)T STEP控制求解和输出,由情况控制卡TSTEP选取e)积分的代价与步长成正比f)对低频(长周期)响应用自适应方法更有效g)计算中可以改变积分步长,这时h) TSTEP 卡片Format:12345678910TfiTEPSIDN1 DTi NOiH?DT2NOS心一-_________________________ ________________________Example:TSTEP2 10 .001 590.011Field Contents£)□ idefllihcaboc number (Integer > 0) Ni Numt>ef of tirne steps d Q* DTi. (integ&f > 1》 DTiTim^ rKrameni. (R^ol > Q.O)NOi Skip factor kx output. E^y NOHh step wM be s&rtd tor oulpul. (Inteaar > 0; Default = 1)7. 5直接瞬态响应与模态瞬态响应比较ModalDirect* Small ModelXLarge ModelXFew Time StepsXMany Time StepsXHigh Frequency ExcitationXNonlinearitiesXUniform Acceleration AssumedInitial Conditions X7. 6瞬态响应求解控制emotive Cor~htrolSOIL(for reciuir^edl input s■日e b日law.* C^nitrol 吕QUtiQnDLOAO LOADSET METHODS DAMPING VC TSTEP (ft^otlh e require eft)■ opfionfiN j (moclaV - r<FCfwiir«ici> (modal ■ optiori-all> (diireiict ■ ot^ t ionuaiil> (botlh 二re c| ui rod)-Bulk Data SectionASET T OMIT EIGRL or EIGR TSTEPTICTLOADi LSEQ TABLED! □AREA DELAY □LOAD TABDMP1(both - optional) (modal - required} (both - required) (direct - optional) (both • required} (both - optional} (both - optional) (both - required*) (both - optional) (both - optional} (modal - optional)CASE CONTROL OUTPUT * Grid outputACCELERATIONDISPLACEMENT (or VECTOR)GPSTRESSNLLOAD (nonlinear load output)QLOAD (output appllied load)SACCELERATION [ (solution set output - A-set in direct SDISPLACEMENT } solutions, modal variables inSVELOCITY J modal solutions)SVECTOR (A-set eigenvector)SPCFORCESVELOCITYMPCFORCE・ Element outputEL STRESS (or STRESSJELFORCE {or FORCE) STRAIN・ SpecialOTIME (controls solution output times}例子1) DIRECT TRANSIENT RESPONSE1 psi over the total surfaceINPUT FILEID SEMINAR, PROB4SOL 109TIME 30CENDTITLE= TRANSIENT RESOPONSE WITH TIME DEPENDENT PRESSURE AND POINT LOADSSUBTITLE= USE THE DIRECT METHODECHO= PUNCHSPC= 1SET 仁11, 33, 55DISPLACEMENT= 1SUBCASE 1DLOAD= 70® SELECT TEMPORAL COMPONENT OF TRANSIENT LOADING LOADSET= 100SELECT SPACIAL DISTRIBUTION OF TRANSIENT LOADING TSTEP= 10PSELECT INTERGRATION TIME STEPS$OUTPUT (XYPLOT)XGRID=YESYGRID=YESXTITLE = TIME (SEC)YTITLE- DISPLACEMENT RESPONSE AT CENTER TIPXYPLOT DISP RESONSE / 11(T3)YTITLE= DISPLACEMENT RESPONSE AT CENTER TIPXYPLOT DISP RESPONSE / 33 (T3)YTITLE= DISPLACEMENT RESPONSE AT OPPSITE CORNERXYPLOT DISP RESPONSE . 55 (T3)$BEGIN BULKPARAM, COUPMASS, 1PARAM, WTMASS, 0.0025$INCLUED' plate.bdf '$$ SPECIFY STRUCTURAL DIAMPING$ 3 PERCENT AT 250 HZ. = 1571 RAD/SEC$PARAM, G, 0.06PARAM, W3, 1571$$ APPLY UNTI PRESSURE LOAD TO PLATE$LSEQ, 100, 300, 400$PLOAD2, 400, 4., 4, THRU, 40$$ VARY PRESSURE LOAD (250HZ)$TLOAD2, 200, 300, , 0, 0., 8.E-3, 250., -90.$$ APPLY POINT LOAD OUT OF PAHSE WITH PRESSURE LOAD $TLOAD2, 500, 600, , 0, 0., 8.E-3, 250., -90.$DAREA, 600, 11, 3, 1.$$ COMBINE LOADS$DLOAD, 700, 1., 1., 200, 50., 500$$ SPECIFY INTERGRATION TIME STEPS$TSTEP, 100, 100, 4.0E-4, 1$ENDDATA2)) MODAL TRANSIENT RESPONSEINPUT FILEID SEMINAR, PROB4SOL 112TIME 30CENDTITLE = TRANSIENT RESPONSE WITH TIME DEPENDENT PRESSURE AND POINT LOADS SUBTITLE = USE THE MODAL METHODECHO = UNSORTEDSPC = 1SET 111 = 11, 33, 55DISPLACEMENT(SORT2) = 111SDAMPING = 100SUBCASE 1METHOD = 100DLOAD = 700LOADSET = 100TSTEP = 100$OUTPUT (XYPLOT)XGRID=YESYGRID=YESXTITLE= TIME (SEC)YTITLE= DISPLACEMENT RESPONSE AT LOADED CORNERXYPLOT DISP RESPONSE / 11 (T3)YTITLE= DISPLACEMENT RESPONSE AT TIP CENTERXYPLOT DISP RESPONSE / 33 (T3)YTITLE= DISPLACEMENT RESPONSE AT OPPOSITE CORNERXYPLOT DISP RESPONSE / 55 (T3)$BEGIN BULKPARAM, COUPMASS, 1PARAM, WTMASS, 0.00259$$ PLATE MODEL DESCRIBED IN NORMAL MODES EXAMPLE PROBLEM$INCLUDE 'plate.bdf '$$ EIGENVALUE EXTRACTION PARAMETERS $EIGRL, 100, , ,5$$ SPECIFY MODAL DAMPING$TABDMP1, 100, CRIT,+, 0., .03, 10., .03, ENDT$$ APPLY UNIT PRESSURE LOAD TO PLATE $LSEQ, 100, 300, 400$PLOAD2, 400, 1., 1, THRU, 40$$ VARY PRESSURE LOAD (250 HZ)$TLOAD2, 200, 300, , 0, 0., 8.E-3, 250., -90 $$ APPLY POINT LOAD (250 HZ)$TLOAD2, 500, 600,610, 0, 0.0, 8.E-3, 250., -90. $DAREA, 600, 11, 3, 1.DELAY, 610, 11, 3, 0.004$$ COMBINE LOADS$DLOAD, 700, 1., 1., 200, 25., 500$$ SPECIFY INTERGRATION TIME STEPS $TSTEP, 100, 100, 4.0E-4, 1$ENDDATA<<z。

交流分析交流分析又称AC 分析,就是求电路的频域响应。
当输入信号的频率变化时,它能够计算出电路的幅频响应和相频响应。
作交流分析时,信号源应用交流源VAC 或IAC 。
1.交流分析举例A. 用Capture 软件画好电路图如下,电路默认参数设置为:V2=3V , V1=820mV, I1=2uAV3=1Vac,0Vdc, C1=1p. W/L of NMOS =10u/1u.W/L of PMOS =10u/1u NMOS 使用MbreakN3,PMOS 使用MbreakP3.B. 设置分析类型和参数。
在如图所示的参数设置框中设置参数如下:图2.3.22 AC 分析参数设置在Analysis type 栏中选“AC Sweep/Noise ”。
在Option 栏中选“General Settings ”。
在AC Sweep Type栏中选“Logarithmi:Decade”。
意思是以10倍频方式扫描。
在Start栏中填入“1k”。
在End栏中填入“10MEG”。
在Points/Decade栏中填入“10”。
意思是频率从1kHz变化到10MHz,每10倍频间隔计算10个点。
Noise Analysis栏是作噪声分析用的,这里可以不选。
设置完后按“确定”键。
C.运行Pspice。
D.查看单端输出时电压增益的波特图。
①在Probe窗口中,执行Trace/Add Trace命令,在“Trace Expression”文本框中键入DB(V(out)),即显示出电压增益的幅频特性曲线。
②点选Trace/Add Y Axis ,增加一个纵轴。
③在“Trace Expression”文本框中键P(V(out)),即显示出电压增益的相频参数扫描分析参数扫描分析就是当电路中某个参数在一定的范围变化时,对指定的每个参数值进行一次基本分析。
每一种基本分析如DC分析、AC分析、TRAN分析都可与参数扫描分析配合使用。
它在电路优化方面有着重要作用。
二阶系统的瞬态响应实验报告二阶系统的瞬态响应实验报告引言:在控制系统中,瞬态响应是指系统在受到外部激励后,从初始状态到达稳定状态所经历的过程。
而二阶系统是一类常见的动态系统,其特点是具有两个自由度。
本次实验旨在通过对二阶系统的瞬态响应进行实验研究,探索其特性和性能。
实验目的:1. 理解二阶系统的结构和特性;2. 掌握二阶系统的瞬态响应分析方法;3. 通过实验验证理论模型的准确性。
实验装置与方法:本次实验采用了一台二阶系统实验装置,其中包括了一个二阶系统模块、信号发生器、示波器等设备。
实验步骤如下:1. 搭建实验装置,确保各设备连接正确并稳定;2. 设定信号发生器的输入信号频率和幅值;3. 通过示波器观察和记录系统的输出响应;4. 改变输入信号的频率和幅值,重复步骤3。
实验结果与分析:通过实验观察和记录,我们得到了二阶系统在不同输入信号条件下的瞬态响应曲线。
根据实验数据,我们可以进行以下分析:1. 频率对瞬态响应的影响:在实验中,我们分别设定了不同频率的输入信号,并观察了系统的瞬态响应。
结果显示,当输入信号的频率较低时,系统的瞬态响应较为迟缓,需要较长时间才能达到稳定状态。
而当输入信号的频率较高时,系统的瞬态响应较为迅速,能够更快地达到稳定状态。
这说明在二阶系统中,频率对瞬态响应具有显著影响。
2. 幅值对瞬态响应的影响:我们还通过改变输入信号的幅值,观察了系统的瞬态响应。
实验结果显示,当输入信号的幅值较小时,系统的瞬态响应较为平缓,没有明显的过冲现象。
而当输入信号的幅值较大时,系统的瞬态响应会出现过冲现象,并且需要更长的时间才能达到稳定状态。
这表明在二阶系统中,幅值对瞬态响应同样具有重要影响。
结论:通过本次实验,我们深入了解了二阶系统的瞬态响应特性。
实验结果表明,频率和幅值是影响二阶系统瞬态响应的重要因素。
频率较低和幅值较小的输入信号可以使系统的瞬态响应更加平缓和稳定。
而频率较高和幅值较大的输入信号则会导致系统瞬态响应更快和过冲现象的出现。
实验报告实验名称瞬态分析课程名称电子电路计算机辅助设计院系部:电气与电子工程学院专业班级:电子1301学生姓名:韩辉学号: 1131230106同组人:实验台号:指导教师:高雪莲成绩:实验日期:华北电力大学实验原理1.瞬态分析(1)瞬态分析定义:在给定输入激励信号作用下,计算电路输出端的瞬态响应。
进行瞬态分析时,首先计算t=0时的电路初始状态,然后从t=0到某一给定的时间范围内选取一定的时间步长,计算输出端在不同时刻的输出电平。
分析结果保存在dat文件中,可用probe模块分析显示波形结果。
(2)PSpice可对大信号非线性电路进行瞬态分析,即是求电路时域响应,所以也叫时域扫描(Time Domain)。
可在给的激励信号(激励信号有脉冲信号、分段线性信号、正弦调幅信号、调频信号和指数信号)情况下,求电路输出的时间响应、延时特性,也可在没有激励信号的情况下,仅依电路存储能量,求得振荡波形和周期等。
(3)参数设置:•Run to:瞬态分析终止的时间•Start saving data:开始保存分析数据的时刻•Maximum step:分析时间的步长设置。
Pspice会根据分析时间自动调节分析步长,但是也能够设置该值。
•Skip the initial transient bias point calculation:是否进行初始偏置点运算,如果跳过,偏置条件由电感、电容等器件的初始条件确定。
•Print values in the output: 输出数据的时间步长,若该值与瞬态分析中采用的时间值不相同,pspice将采用二阶多项式插值的方法从瞬态分析结果推得需要输出数据的各个时刻输出电平值。
2.傅立叶分析(1)傅立叶分析作用:在瞬态分析完成后,通过傅立叶积分,计算瞬态分析输出结果波形的直流、基波和各次谐波分量。
一般情况下,傅立叶分析的采样时间间隔与瞬态分析中的打印时间步长相同。
如果该步长大于瞬态分析终止时间的1%,则取后者为傅立叶分析是采样时间间隔并采用二阶插值的方法,确定每一采样点的信号电平值。
激励器作用使用激励器提高声音的清晰度,可懂性和表现力。
使声音更加悦耳动听,降低听激励器音疲劳,增加响度。
虽然激励器只给声音增加了0.5dB左右的谐波成分,但实际听起来,音量好像增加了10dB左右。
使声音的听觉响度明显增加,声音图像的立体感,以及声音的分离度的增加;改善了声音的定位和层次感,还可以提高重放声音的音质,磁带的复制率。
因为声信号在传送和录制过程中会损失高频谐波成分,出现高频噪声。
此时前者用激励器先对信号进行补偿,后者可用滤波器将高频噪声滤掉后,再营造出高音成分,保证重放音质。
激励器的调节需要音响师对系统的音质和音色进行判别,再根据主观听音评价进行调整。
编辑本段激励器使用改善music音频质量利用听觉激励器提高系统的处理能力,达到改善EFP音频质量的目的。
听觉激励器目前,在激励方式进行音频信号处理方面,有听觉激励器(Aural Exciter)、激励处理软件和激励电路。
其中专业听觉激励器比较适合EFP。
听觉激励器激发的谐波信号是经过仿真设计的,可以类比于人工混响模拟厅堂声学特性。
因此,不应简单地把这种人工谐波的产生看作原信号“失实”并等同于失真。
激励器的设计目的是恢复音频信号所丢失的谐波成份,有效地扩展高频带宽并提高信噪比,从而提高声音还原的清晰度和表现力。
而且,这些谐波的电平非常低,对信号的功率几乎不产生影响。
由于激励器具有上述优点,利用它对信号进行处理,可以提高声音质量。
实践中我们采用Aphex Aural Exciter-Ⅲ-250 (简称Ax-Ⅲ-250)专业听觉激励器。
Ax-Ⅲ-250为双通道处理器,每一个通道均包括相同的两个音频路径,即主信号路径(Main Path)和旁链受激励信号路径(Sidechain Path)。
主路径把来自输入级的音频信号直接送到输出级,基本上不加任何处理;旁链路径则包含激励器的所有“心脏”电路。
两路音频信号在加法电路级上混合,混合比例由Mix功能控制。
瞬态激励脉冲有效高频分量的波长下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!瞬态激励脉冲有效高频分量的波长在电子学和通信领域中,瞬态激励脉冲是一种常见的信号形式,其有效高频分量的波长对于系统性能至关重要。
实验三
各种激励信号的设置及瞬态分析
学院:物理与电子学院
班级:电信1105班
姓名:刘岩
学号:1404110729
一、实验目的
1、了解各种激励信号中参数的意义,掌握其设置方法。
2、掌握对电路进行瞬态分析的设置方法,能够对所给出的实际电路进行规
定的瞬态分析,得到电路的瞬态响应曲线。
二、实验内容
1、正确设置正弦信号、脉冲信号、周期性分段线性信号,参数自行确定,要求屏幕上正好显示4个完整周期的信号曲线。
5.0V
2.5V
0V
0s 2.0s 4.0s 6.0s8.0s V(C1:1)
Time
10V
5V
0V
0s5s10s15s20s V(C1:1)
Time
2、对下图单管放大电路进行瞬态分析,信号源采用正弦波,频率从1kHz
到20kHz任意选定。
根据信号频率,合理选择分析结束时间,观测输出端的波
形,屏幕上正好显示5个完整周期的波形。
2.0V
0V
-2.0V
0s100us200us300us400us500us V(C2:2)
Time
10mV
0V
-10mV
0s100us200us300us400us V(C1:1)
Time
3、在瞬态分析的同时对输出节点(out)的电压波形进行傅里叶分析,分析计算到6次谐波。
FOURIER COMPONENTS OF TRANSIENT RESPONSE V(V_V1)
DC COMPONENT = -1.719473E-08
HARMONIC FREQUENCY FOURIER NORMALIZED PHASE RMALIZED
NO (HZ) COMPONENT COMPONENT (DEG) PHASE (DEG)
1 1.000E+03 5.000E-03 1.000E+00 -3.067E-04 0.000E+00
2 2.000E+0
3 2.640E-08 5.281E-06 -1.587E+02 -1.587E+02
3 3.000E+03 1.869E-08 3.739E-06 1.675E+02 1.675E+02
4 4.000E+03 1.066E-08 2.133E-06 1.355E+02 1.355E+02
5 5.000E+03 4.034E-09 8.069E-07 1.563E+02 1.563E+02
6 6.000E+03 9.503E-09 1.901E-06 -1.748E+02 -1.747E+02
TOTAL HARMONIC DISTORTION = 7.118649E-04 PERCENT
JOB CONCLUDED
TOTAL JOB TIME .77
三、实验心得体会
通过本次实验,使我更充分的理解与观察了正弦信号、脉冲信号、周期性分段线性等各种信号下的波形,了解了他们的发生原理,加深了我们对这些工作信号更加直观的了解,并且对以后的学习打下了扎实的基础。
本次试验使我对信号的处理有了更深厚的兴趣。
只需改变一个元器件,就能产生无穷多大信号变化,非常奇妙。