第七章 空间问题的基本理论
- 格式:doc
- 大小:302.00 KB
- 文档页数:15
可编辑修改精选全文完整版《马克思主义哲学原理》第七章社会发展和人的发展第七章社会发展和人的发展(一)社会发展的历史进程1.社会形态及其活动构成人类社会发展的主要内容和阶段。
(1)五种社会形态社会形态是一定生产力基础之上的经济基础和上层建筑的统一体,是社会的经济形态、政治形态和观念形态的统一体。
到目前为止,人类历史已经形成了五种社会形态,即原始社会形态、奴隶社会形态、封建社会形态、资本主义社会和社会主义社会(共产主义的第一阶段)。
(2)社会形态的发展是一种自然历史过程把人类社会看做是一种自然历史过程,是历史唯物主义对社会历史的唯物辩证本性的揭示。
这一思想表明,人类社会虽然有着与自然迥然不同的特点,但本质上同自然界一样,是一种物质体系,其发展是一个不以人的意志为转移的自然历史过程。
社会发展是一个自然历史过程的主要含义是:第一,从人类社会的起源和存在的基础看,人类社会同自然界一样,在本质上是一个客观的物质体系。
人类社会是自然界长期发展的产物;人类社会的存在离不开自然界,其存在与发展的基础就是每日每时都必须进行的人与自然之间的“物质交换”活动,即采取一定的生产方式进行的物质生产活动。
第二,从人类社会的发展来看,人类社会同自然界一样,本质上是一个不以人的意志为转移的、合乎规律的辩证发展过程。
生产力与生产关系、经济基础与上层建筑的矛盾是社会的基本矛盾,人类社会正是在这两对矛盾的推动下,依次经历了原始社会、奴隶社会、封建社会、资本主义社会、社会主义社会五种社会形态,这是一个不依任何个人、任何阶级以至整个人类的意志为转移的发展过程。
第三,社会现象尽管是不可逆的,但在不可逆的社会现象背后,历史规律却有着“重复性”。
只要具备一定的条件,某种合乎规律的现象就必然重复出现。
确认社会发展是一种自然历史过程,只有把社会关系归结于生产关系,把生产关系归结于生产力的高度,才有可靠的根据把社会发展看做是自然历史过程。
这是因为:①生产力是整个社会发展的最终决定力量和根源。
初中数学空间理论教案1. 让学生掌握空间中点、线、面的基本概念和性质。
2. 培养学生识别和运用点、线、面解决实际问题的能力。
3. 培养学生空间想象能力和抽象思维能力。
二、教学内容1. 空间中点、线、面的定义及性质。
2. 点、线、面的位置关系。
3. 点、线、面在实际问题中的应用。
三、教学重点与难点1. 重点:空间中点、线、面的基本概念和性质,点、线、面的位置关系。
2. 难点:点、线、面的位置关系的运用,解决实际问题。
四、教学方法1. 采用讲授法,讲解点、线、面的定义及性质。
2. 采用案例分析法,分析点、线、面的位置关系。
3. 采用实践法,让学生通过实际问题运用点、线、面的知识。
五、教学过程1. 导入:通过生活中的实例,引导学生认识空间中的点、线、面,激发学生的学习兴趣。
2. 讲解:详细讲解点、线、面的定义及性质,让学生理解并掌握基本概念。
3. 分析:分析点、线、面的位置关系,引导学生运用所学知识分析实际问题。
4. 实践:布置练习题,让学生通过实际问题运用点、线、面的知识,巩固所学内容。
5. 总结:对本节课的内容进行总结,强调重点知识点,布置课后作业。
六、教学评价1. 课后作业:检查学生对点、线、面知识的掌握程度。
2. 课堂练习:评估学生在实际问题中运用点、线、面的能力。
3. 学生反馈:了解学生对教学内容的满意度和建议,不断改进教学方法。
七、教学反思在教学过程中,要注意引导学生从生活中的实例认识点、线、面,培养学生的空间想象力。
同时,通过实际问题,让学生学会运用点、线、面的知识解决实际问题,提高学生的抽象思维能力。
在教学方法上,要注重启发式教学,激发学生的学习兴趣,提高学生的参与度。
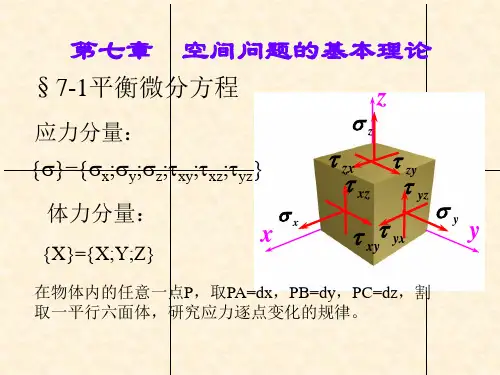
第七章 空间问题的基本理论§7-1 平衡微分方程图7-1在物体内的任意一点P ,割取一个微小的平行六面体,它的六面垂直于从标轴,而棱边的长度为dz PC dy PBdx PA ===,,,图7-1。
一般而论,应力分量是位置坐标的函数。
因此,作用在这六面体两对面上的应力分量不完全相同,而具有微小的差量。
例如,作用在后面的正应力是x σ,由于坐标x 改变了dx 作用在前面的正应力应当是dx xx x ∂∂+σσ,余类推。
由于所取的六面体是微小的,因而可以认为体力是均匀分布的。
首先,以连接六面体前后两中心的直线ab 为矩轴,列出力矩的平衡方程0∑=abM :略去微量以后,得zy yz ττ=。
同样可以得出yx xy xz zx ττττ==,只是又一次证明了切应力的互等性。
其次,以x 轴为投影轴,列出投影的平衡方程∑=0x F ,得.0d d d d d d d )(d d d d )d (d d d d )d (=+-∂∂++-∂∂++-∂∂+z y x f y x y x dz zx z x z y y z y z y x x x zx zxzx yx yx yz x xx ττττττσσσ由其余2个平衡方程,∑=0yF 和∑=0z F ,可以得出与此相似的2个方程。
将这3个方程约简以后,除以z y x d d d ,得⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂.0,0,0z yzxz z y xy zy y x zxyz x f y x z f x z y f z y x ττσττσττσ (7-1)这就是空间问题的平衡微分方程。
§7-2 物体内任一点的应力状态现在,假定物体在任一点P 的6个直角坐标面上的应力分量,,,z y x σσσyx xy xy zx zy yz ττττττ===,,为已知,试求经过P 点的任一斜面上的应力。

弹性力学简明教程《弹性力学简明教程》是2002年8月高等教育出版社出版的图书,作者是徐芝纶。
1出版信息弹性力学简明教程作者:徐芝纶出版社:高等教育出版社副标题:弹性力学简明教程出版年:2002-8页数:219定价:17.40元装帧:平装ISBN:97870401071972内容简介《弹性力学简明教程》是教育部“十五”国家规划教材。
是在第二版的基础上,保持原有的体系和特点,根据教学改革的需要和国家的有关新标准,进行了修订。
全书按照由浅入深的原则,安排了平面问题的理论及解答、空间问题的理论及解答和薄板弯曲理论。
并着重介绍了弹性力学的数值解法,即差分法、变分法和有限单元法。
《弹性力学简明教程》作为弹性力学的入门教材,注重基本理论(基本概念、基本方程和基本解法)的阐述及其应用,以使学生在掌握基本理论的基础上能阅读和应用弹性力学文献,并能初步应用弹性力学的数值解法解决工程实际问题。
3目录主要符号表第一章绪论1-1 弹性力学的内容1-2 弹性力学中的几个基本概念1-3 弹性力学中的基本假定习题第二章平面问题的基本理论2-1 平面应力问题与平面应变问题2-2 平衡微分方程2-3 平面问题中一点的应力状态2-4 几何方程刚体位移2-5 物理方程2-6 边界条件2-7 圣维南原理及其应用2-8 按位移求解平面问题2-9 按应力求解平面问题相容方程2-10 常体力情况下的简化应力函数习题第三章平面问题的直角坐标解答3-1 逆解法与半逆解法多项式解答 .3-2 矩形梁的纯弯曲3-3 位移分量的求出3-4 简支梁受均布荷载3-5 楔形体受重力和液体压力习题第四章平面问题的极坐标解答4-1 极坐标中的平衡微分方程4-2 极坐标中的几何方程及物理方程4-3 极坐标中的应力函数与相容方程4-4 应力分量的坐标变换式4-5 轴对称应力和相应的位移4-6 圆环或圆筒受均布压力4-7 压力隧洞4-8 圆孔的孔口应力集中4-9 半平面体在边界上受集中力4-10 半平面体在边界上受分布力习题第五章用差分法和变分法解平面问题5-1 差分公式的推导5-2 应力函数的差分解5-3 应力函数差分解的实例5-4 弹性体的形变势能和外力势能5-5 位移变分方程5-6 位移变分法5-7 位移变分法的例题习题..第六章用有限单元法解平面问题6-1 基本量及基本方程的矩阵表示6-2 有限单元法的概念6-3 单元的位移模式与解答的收敛性6-4 单元的应变列阵和应力列阵6-5 单元的结点力列阵与劲度矩阵6-6 荷载向结点移置单元的结点荷载列阵6-7 结构的整体分析结点平衡方程组6-8 解题的具体步骤单元的划分6-9 计算成果的整理6-10 计算实例6-11 应用变分原理导出有限单元法基本方程习题第七章空间问题的基本理论7-1 平衡微分方程7-2 物体内任一点的应力状态7-3 主应力最大与最小的应力7-4 几何方程及物理方程7-5 轴对称问题的基本方程习题第八章空间问题的解答8-1 按位移求解空间问题8-2 半空间体受重力及均布压力8-3 半空间体在边界上受法向集中力8-4 按应力求解空间问题8-5 等截面直杆的扭转8-6 扭转问题的薄膜比拟8-7 椭圆截面杆的扭转8-8 矩形截面杆的扭转习题第九章薄板弯曲问题9-1 有关概念及计算假定9-2 弹性曲面的微分方程9-3 薄板横截面上的内力9-4 边界条件扭矩的等效剪力9-5 四边简支矩形薄板的重三角级数解9-6 矩形薄板的单三角级数解9-7 矩形薄板的差分解9-8 圆形薄板的弯曲9-9 圆形薄板的轴对称弯曲习题。
第七章 空间问题的基本理论§7-1 平衡微分方程图7-1在物体内的任意一点P ,割取一个微小的平行六面体,它的六面垂直于从标轴,而棱边的长度为dz PC dy PB dx PA ===,,,图7-1。
一般而论,应力分量是位置坐标的函数。
因此,作用在这六面体两对面上的应力分量不完全相同,而具有微小的差量。
例如,作用在后面的正应力是x σ,由于坐标x 改变了dx 作用在前面的正应力应当是dx xxx ∂∂+σσ,余类推。
由于所取的六面体是微小的,因而可以认为体力是均匀分布的。
首先,以连接六面体前后两中心的直线ab 为矩轴,列出力矩的平衡方程0∑=ab M :略去微量以后,得zyyzττ=。
同样可以得出yx xy xz zx ττττ==,只是又一次证明了切应力的互等性。
其次,以x 轴为投影轴,列出投影的平衡方程∑=0xF ,得.0d d d d d d d )(d d d d )d (d d d d )d (=+-∂∂++-∂∂++-∂∂+z y x f yx y x dz zxz x z y yz y z y x x x zx zxzxyx yxyzx xxττττττσσσ由其余2个平衡方程,∑=0y F 和∑=0z F ,可以得出与此相似的2个方程。
将这3个方程约简以后,除以z y x d d d ,得⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂.0,0,0zyzxzzy xyzyyx zxyzxf yxzf x z y f zy x ττσττσττσ (7-1)这就是空间问题的平衡微分方程。
§7-2 物体内任一点的应力状态现在,假定物体在任一点P 的6个直角坐标面上的应力分量,,,z y x σσσyx xy xy zx zy yz ττττττ===,,为已知,试求经过P 点的任一斜面上的应力。
为此,在P 点附近取一个平面ABC ,图7-2。
当四面体PABC 无限减小而趋于P 点,平面ABC 上的应力就成为该斜面上的应力。
n命平面ABC 的外法线为n ',其方向余弦为n z n m y n l x n ='='='),cos(,),cos(,),cos(。
设三角形ABC 面积为S d ,则三角形BPC ,CPA ,APB 的面积分别为S l d ,S m d ,S n d 。
四面体PABC 的体积用V d 代表。
三角形ABC 上的全应力p 在坐标轴上的投影用z y x p p p ,,代表。
根据四面体的平衡条件∑=0x F ,得:xyzx yzzyxn lm nl mn n m l τττσσσσ222222+++++=。
(7-3)22222n z y x n p p p στ-++=。
(7-4)如果在S 面上作用面力,则面力和应力的关系式为:⎪⎭⎪⎬⎫=++=++=++.)(,)(,)(z s yz xz z y s xy zy y x s zxyxxf m l n f l n m f n m l ττσττσττσ(在σs 上) (7-5)其中s yz s x )(,,)(τσ 是应力分量的边界值。
这就是空间问题的应力边界条件,它表明应力分量的边界值与面力分量之间的关系 。
§7-3 主应力 最大与最小的应力设经过一点P 的某一斜面上的切应力等于零,则该斜面上的正应力称为在P 点的一个主应力,该斜面称为在P 点的一个应力主面,而该斜面的法线方向称为P 点的一个应力主向。
假设在P 点有一个应力主面存在。
这样,由于该面上的切应力等于零,所以该面上的全应力就等于该面上的正应力,也就等于主应力σ。
于是该面上的全应力在坐标轴上的投影成为σσσn p m p l p z y x ===,,。
将式(7-2)代入,即得⎪⎭⎪⎬⎫=++=++=++.,σττσσττσσττσn m l n m l n m l n m l yzxzzxy zyyzx yx x(a )此外还有方向余弦的关系式1222=++n m l。
(b )如果将式(a )与(b )联立求解,能够得出n m l ,,,σ的一组解答,就得到P 点的一个主应力以及与之对应的应力主面和应力主向。
用下述方法求解,比较方便。
将式(a )改写为⎪⎭⎪⎬⎫=-++=+-+=++-.0)(,0)(,0)(n m l n m l n m l z yz xz zy y xy zxyxxσστττσστττσσ(c)这是n m l ,,的3个齐次线性方程。
因为由式(b )可见n m l ,,不能全等于零,所以这三个方程的系数的行列式式等于零,即.0=---σστττσστττσσzyzxzzy y xy zxyxx用式xy zx yz τττ,,代替yx xz zy τττ,,,将行列式展开,得σ的三次方程.0)2()()(222223=+-----+++++-xyzx yz xy y yzx zy x xyyzyx xz zy z yx ττττστσσσσσττσσσσσσσσσσσ(7-6)证明:在受力物体内的任意一点,一定存在三个互相垂直的应力主面以及对应的三个主应力。
0))()((321=---σσσσσσ。
z yxσσσσσσ++=++321。
1、体内的任意一点,三个互相垂直的面上的正应力之和是不变量(不随坐标系而变的量),并且等于该点的三个主应力之和。
2、三个主应力中最大的一个就是该点的最大正应力,而三个主应力中最小的一个就是该点的最小正应力。
3、又可见,在三个主应力相等的特殊情况下,所有各截面上的正应力都相同(也就等于主应力),而切应力都等于零。
4、最大与最小的切应力,在数值上等于最大主应力与最小主应力之差的一半,作用在通过中间主应力并且“平分最大主应力与最小主误码力的夹角”的平面上。
§7-4 几何方程及物理方程1 几何方程现在来考虑空间问题的几何学方面。
在空间问题中,形变分量与位移分量应当满足下列六个方程,即空间问题的几何方程:⎪⎪⎭⎪⎪⎬⎫∂∂+∂∂=∂∂+∂∂=∂∂+∂∂=∂∂=∂∂=∂∂=y u x x z u z y z y x u xy zx yz z y x υγωγυωγωευεε,,,,(7-8)其中的第一式、第二式和第六式已在§2-4中导出,其余三式可用同样的方法导出。
此外,在物体的给定约束位移的边界u s 上,位移分量还应当满足下列三个位移边界条件,即空间问题的位移边界条件:.)(,)(,)(ωωυυ===s s s u u (在u s 上) (7-9)此三式的等号左边是位移分量的边界值,等号右边是该边界上的约束位移分量的已知值。
2、几个重要概念。
设有微小的正平行六面体,其棱边的长度为z y x d ,d ,d 。
在变形之前,它的体积是x y x d d d ;在变形之后,它的体积将成为)d d )(d d )(d d (z z y y x x z y x εεε+++。
其公式为.1)1)(1)(1(d d d d d d )d d )(d d )(d d (z y x yx z z z y z yx z y x z y x zy x zy x z z y y x x εεεεεεεεεεεεεεεεεεθ++++++=-+++=-+++=由位移和形变量是微小的假定,可略去线应变的乘积项(更高阶的微量),则上式简化为z y x εεεθ++=。
(7-10)将几何方程(7-8)中的前三式代入,得zyxu ∂∂+∂∂+∂∂=ωυθ。
(7-11)它表明体应变与位移分量之间的简单微分关系。
物理方程:⎪⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪⎪⎬⎫+=+=+=+-=+-=+-=.)1(2,)1(2,)1(2)],([1)],([1)],([1xy xy zx zx yz yz y x z z x z y y z y x x EE E E EEγμγτμγτμγσσμσεσσμσεσσμσε (7-14)将上式的三个应变分量相加得:)(21z yx z y x Eσσσμεεε++-=++设 )(z yx σσσ++=Θ 为一个不变量得空间问题的虎克定律: Θ-=Eμθ21上式的Θ就称为 μ21-E 称为第五节 轴对称问题的基本方程在空间问题中,如果弹性体的几何形状、约束情况,以及所受的外力作用,都是对称于某一轴(通过这个轴的任一平面都是对称面),则所有的应力、形变和位移也对称于一轴。
这就问题称为空间轴对称问题。
首先来导出对称问题的平衡微分方程。
用相距ρd 的两个圆柱,互成ϕd 角的两个沿直面及相距z d 的两个水平面,从弹性全割取一个微小六面体PABC ,图7-4。
沿ρ方向的正应力,称为径向正向应力,用ρσ代表;沿ϕ方各听正应力,称为环向正应力,用ϕσ代表;沿z 方向的正应力,称为轴向正应力,代然用z σ代表;作用在圆柱面上而沿z 方向作用的切应力用z ρτ代表,作用在水平面上而沿ρ方向作用的切应力用ρτz 代表。
根据切应力的互等性,z z ρρττ=。
由于对称性,ϕρρϕττ=及ϕϕττz z =都不存在。
这样,总共只有四个应力分量:z z z ρρϕρττσσσ=,,,,一般都是ρ和z的函数。
ρd图7-4将六面体所受的各力投影到六面体中心的径向轴上,取2d sin ϕ及2d cos ϕ分别近似地等于2d ϕ及1,得平衡方程.0d d d d d d d )(2d d d 2d d d d )d )(d (=+-∂∂++--+∂∂+z f zzz z z z z ρϕρρϕρτρϕρττϕρσϕρσϕρρρρσσρρρρϕρρρZx中得空间轴对称问题的平衡微分方程如下:⎪⎪⎭⎪⎪⎬⎫=++∂∂+∂∂=+-+∂∂+∂∂.0,0zzz zz f zf z ρτρτσρσστρσρρρϕρρρ (7-15) 现在来导出轴对称问题的几何方程。
沿ρ方向的线应变,称为径向线应变,用ρε代表;沿ϕ方向的线应变,称为环向线应,用ϕε代表;沿z方向的线应变,称为轴向线应变,仍然用z ε代表;ρ方向与z 方向之间的直角的改变用ργz 代表。
由于对称,ρϕγ及ϕργ都等于零。
沿ρ方向的位移分量称为径向位移,用ρu 代表;沿z 方向的位移分量称为轴向位移,用z u 代表。
由于对称,环向位移0=ϕu 。
通过与§2-4及§4-2中同样的分析,可见,由于径向位移ρu 引起的形变是ργρερερρρϕρρ∂∂==∂∂=u u u z ,,。
将以上两组形变相叠加,得空间轴对称问题的几何方程ργερερερρρϕρρ∂∂+∂∂=∂∂==∂∂=z z z z u zu zu u u ,.,。