FANUC特殊功能指令应用附宏程序教程说明书(1)
- 格式:pdf
- 大小:6.59 MB
- 文档页数:34

数控车床宏程序程序段为宏程序语句:术或逻辑运算(=)的程序段.制语句的程序段程序调用指令的程序段程序以外的任何程序段都为NC语句.与NC语句的不同使置于单程序段运行方式,机床也不停止.但是,当参数N0.6000#5SBM设定为1时,在单程序段方式中,止.刀具半径补偿方式中宏程序语句段不做为不移动程序段处理.序语句有相同性质的NC语句有子程序调用指令,但没有除O,N或L地址之外的其它地址指令的NC语句其性质与宏程序相同.包含除ONP或L以外的指令地址的程序段其性质与宏程序语句相同.移和循环中,使用GOTO语句和IF语句可以改变控制的流向.有三种转移和循环操作可供使用;循环----------GOTO语句(无条件转移)语句(条件转移)语句(当…时循环)无条件转移(GOTO语句)标有顺序号n的程序段.当指定1到99999以外的顺序号时,出现P/S报警NO.128.可用表达方式指定.n:顺序号(1到99999)条件转移(IF)语句后指定条件表达式.件表达式>]GOTOn如果指定的条件表达式满足时,转移到标有顺序号n的程序段.如果指定的条件表达足,执行下个程序段.件表达式>]THEN如果条件表达式满足,执行预先决定的宏程序语句.只执行一个宏程序语句.达式达式必须包括算符.算符插在两个变量中间或变量和常数中间,并且用括号([,])封闭.表达式可以替代由2个字母组成,用于两个值的比较,以决定它们是相等还是一个值小于或大于另一个值.注意,不能使号.含义于等于于于或等于于于或等于序:程序计算数值1-10的总和最新教案FANUC数控车床宏程序FANUC系统宏程序编程教案车工实习教学教案数控加工与编程实训教案数控编程与操作教案数控宏程序加工斜椭圆CAXA数控车实例教案CAXA数控车教案数控车床实训教案—G73加工国蜗杆车削教案热门教案数控电火花线切割加工教案40多种电子产品制作电路图红外线遥控电子制实例教案.do 自制音响遥控电路教案汽车驾驶教案金属材料教案FLASH相册制作教案微机ATX电源电路的工作原理与钳工常用工具的介绍及使用教案单片机原理及应用教案(附教学推荐教案SQL实验教案.rar计算机组装与维修实验教案模拟电子技术教案.rar数控车床工艺品图纸—印章数控车床工艺品图纸—葫芦数字电子技术实验教案.rar跆拳道教案.doc体育课教案(田径).doc建筑材料教案.rar机械制图期中试卷.doc存储和数变量的初值被加数变量的初值2GT10]GOTO2;当被加数大于10时转移到N2#2;计算和数#1;下一个被加数;转到N1程序结束循环(WHILE语句)E后指定一个条件表达式.当指定条件满足时,执行从D0到END之间的程序.否则,转到END后的程序段.的条件满足时,执行WHILE从D0到END之间的程序.否则,转而执行END之后的程序段,这种指令格式适F语句.D0后的号和END后的号是指定程序执行范围的标号,标号值为1,2,3.若用1,2,3以外的值会产报警NO.126.END循环中的标号可根据需要多次使用.但是,当程序有交叉重复循环(DO范围的重叠)时,出现P/S报警.环当指定DO而没有指定WHILE语句时,产生从DO到END的无限循环.间当在GOTO语句中有标号转移的语句时,进行顺序号检索.反向检索的时间要比正向检索长.用WHILE 现循环可减少处理时间.的变量在使用EQ或NE的条件表达式中,<空>和零有不同的效果,在其它形式的条件表达式中,<空>被当序下面的程序计算数值1到10的总和.#2LE10]DO1;#2;1;案名称:FANUC数控车床宏程序大小:84K时间:2010-11-3 23:04:19次数统计:: 2: 6:22221 使用快车下载。
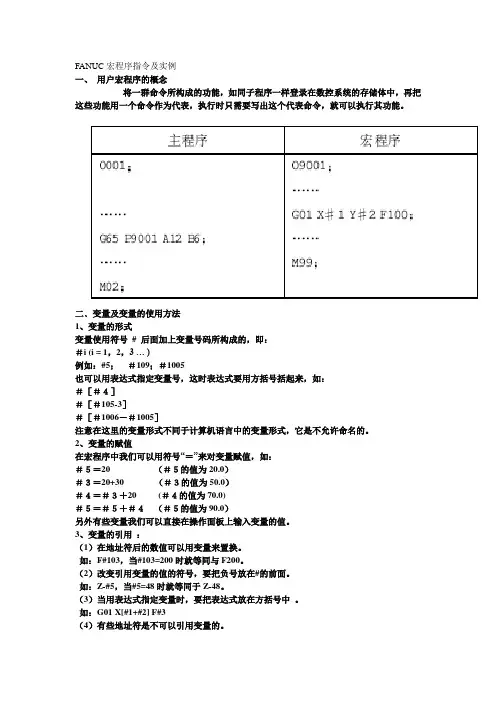
FANUC宏程序指令及实例一、用户宏程序的概念将一群命令所构成的功能,如同子程序一样登录在数控系统的存储体中,再把这些功能用一个命令作为代表,执行时只需要写出这个代表命令,就可以执行其功能。
二﹑变量及变量的使用方法1、变量的形式变量使用符号# 后面加上变量号码所构成的,即:#i (i = 1,2,3 … )例如:#5;#109;#1005也可以用表达式指定变量号,这时表达式要用方括号括起来,如:#[#4]#[#105-3]#[#1006-#1005]注意在这里的变量形式不同于计算机语言中的变量形式,它是不允许命名的。
2、变量的赋值在宏程序中我们可以用符号“=”来对变量赋值,如:#5=20(#5的值为20.0)#3=20+30 (#3的值为50.0)#4=#3+20 (#4的值为70.0)#5=#5+#4(#5的值为90.0)另外有些变量我们可以直接在操作面板上输入变量的值。
3、变量的引用:(1)在地址符后的数值可以用变量来置换。
如:F#103,当#103=200时就等同与F200。
(2)改变引用变量的值的符号,要把负号放在#的前面。
如:Z-#5,当#5=48时就等同于Z-48。
(3)当用表达式指定变量时,要把表达式放在方括号中。
如:G01 X[#1+#2] F#3(4)有些地址符是不可以引用变量的。
如:O#26;N#12等都是错误的。
三﹑变量的种类1、局部变量:所谓局部变量,就是在宏程序中局部使用的变量。
调用宏程序时,局部变量级会随着调用多重度的增加而增加。
2、公共变量:公共变量是在主程序,以及调用的子程序中通用的变量。
公共变量可以在程序中赋值,也可以通过操作面板输入。
3、系统变量:四、变量的运算变量的运算次序依次为:①函数②乘和除运算(*、/、AND)③加和减运算(+、-、OR、XOR)方括号嵌套,方括号用于改变运算的次序。
方括号最多可用五层。
五、转移与循环在宏程序中,我们可以通过指令来改变和控制程序的运行流程。
FANUC宏程序详解在FANUC系统中,宏程序是一种非常重要的功能,通过编写宏程序,我们可以让机器在无人值守的情况下完成一系列复杂的操作。
本文将对FANUC宏程序进行详细地介绍,包括宏程序的作用、编写方法、语法规则等方面。
1. 宏程序的作用宏程序是指一组可以重复使用的指令序列,通常用于执行一些常见的任务,例如生产线上的自动化操作、零件加工等。
通过编写宏程序,我们可以节省大量的时间和人力成本,提高整个生产线的效率和产能。
在FANUC系统中,宏程序主要有以下两个作用:1.1 缩短程序编写时间FANUC系统使用G代码编写程序,编写复杂的G代码序列会消耗大量的时间和精力。
而宏程序可以将常用的代码封装起来,减少了程序的编写时间。
例如,在加工中心上,我们可以编写一个宏程序来完成换刀操作,这样就可以省去手动编写换刀程序的时间。
1.2 提高工作精确度宏程序可以确保在每一次执行相同的任务时保持一致性,从而提高工作的精确度和可靠性。
例如,在装配生产线上,我们可以编写一个宏程序来完成紧固螺丝的操作,这样就可以确保每次紧固力度一致,避免螺丝过紧或过松的情况发生。
2. 编写宏程序在FANUC系统中,我们可以通过两种方式来编写宏程序:手动编写和自动生成。
手动编写是指通过手工输入代码来编写宏程序,而自动生成则是指通过FANUC系统自动生成宏程序。
2.1 手动编写手动编写是编写宏程序的最常见方式。
在手动编写宏程序时,我们需要按照FANUC系统的语法规则来编写G代码序列,并保存在一个文件中。
一般情况下,宏程序的文件扩展名为“.mac”。
以下是一个简单的宏程序:O1234G00 X10 Y10G01 Z-5 F500M30上述宏程序的功能是将机器头移动到坐标(10,10)点处,然后向下移动5个单位,同时切削速度为500,最后停止机床。
2.2 自动生成除了手工编写宏程序,我们还可以通过FANUC系统自动生成宏程序。
在FANUC系统中,系统提供了各种预制宏程序,我们可以在需要的时候直接调用这些宏程序。
FANUC用户宏程序编程操作说明一、宏程序的概念和作用宏程序是一种FANUC机器人控制器中的编程语言,用于定义和执行一系列操作指令。
宏程序可以通过使用特定的编程语法,实现自动化的工作过程。
在机器人控制器上创建和调用宏程序可以有效提高生产效率,减少人力成本。
4.确认并保存宏程序。
确保没有语法错误,并将其保存在机器人控制器的内存中。
三、宏程序的调用和执行1.在主程序中调用宏程序。
可以使用特定的指令来调用已创建的宏程序,以便在工作流程中执行相关的任务。
2.配置宏程序的输入参数。
在调用宏程序之前,可以设置相关的输入参数,以便宏程序能够根据不同的情况执行不同的动作。
3.执行宏程序。
一旦宏程序被调用和配置完成,机器人控制器将根据宏程序中定义的指令序列依次执行相应的动作。
4.检查宏程序执行结果。
可以通过监视机器人、制作运动轨迹的视觉效果或通过输出信号检查机器人执行宏程序后的运动状态,确保宏程序的执行效果符合预期。
四、宏程序的调试和优化1.进行宏程序的语法和逻辑检查。
在调用和执行宏程序之前,可以使用FANUC机器人控制器提供的调试工具对宏程序进行语法和逻辑检查,以确保程序的正确性。
2.调整宏程序的时间和空间复杂度。
根据实际应用需求和机器人控制器的性能,可以对宏程序进行适当的优化,以减少程序执行时间和占用的内存空间。
3.进行宏程序的场景仿真。
在实际生产环境之前,可以使用机器人控制器提供的仿真工具对宏程序进行虚拟场景的测试,以确保宏程序的执行效果满足预期,同时减少实际生产中的错误和故障。
五、宏程序的应用示例1.示教和运动控制:通过将示教动作转化为相应的宏指令,可以实现机器人在特定位置和角度上的运动控制,以完成精确的操作。
2.任务自动化:将一系列任务步骤组织成宏程序,可以实现从物料处理到产品组装等一系列任务的自动化执行。
3.智能感应:通过编写合适的宏指令,可以实现机器人对环境的感知和判断,并根据实际情况自动调整动作和运动轨迹。
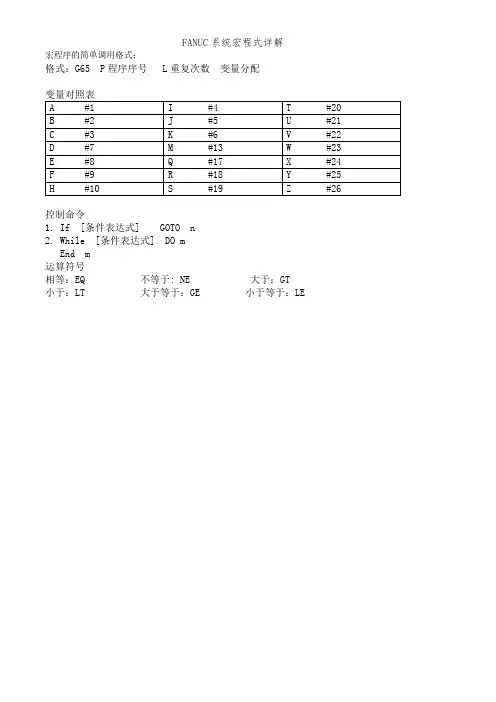
宏程序的简单调用格式:格式:G65 P程序序号 L重复次数变量分配控制命令1.If [条件表达式] GOTO n2.While [条件表达式] DO mEnd m运算符号相等:EQ 不等于: NE 大于:GT 小于:LT 大于等于:GE 小于等于:LEFANUC系统宏程式FANUC系统宏程序编程一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
宏程序设计宏程序与子程序类似,对编制相同加工的操作可以使程序简化.同时宏程序中可以使用变量,算术和逻辑运算及转移指令,还可以方便地实现循环程序设计。
使相同加工操作的程序更方便,更灵活。
本章以FANUC系统为例介绍宏程序设计的内容。
12.1 变量的定义宏程序中使用的变量与日常生活中使用的变量不同,变量用符号“#”后跟变量的变量号指定。
变量可分为四种类型。
1. 空变量#0为空变量,该变量不能赋值。
2. 局部变量#1~#33为局部变量,局部变量只能在宏程序中存储数据。
当断电时局部变量被初始化为空,调用宏程序时,自变量对局部变量赋值。
局部变量的数值范围10-29~1047或-1047~-10-29,如果计算结果超过该范围则发出P/S报警No.111。
3. 公共变量#100~#199、#500~#999为公共变量,公共变量在不同的宏程序中意义相同。
当断电时,变量#100~#199被初始化为空,变量#500~#999的数据不会丢失。
全局变量的数值范围10-29~1047或-1047~-10-29,如果计算结果超过该范围则发出P/S报警No.111。
4. 系统变量#1000~为系统变量,系统变量用于读和写CNC运行时的各种数据,如刀具的当前位置和补偿值等。
5. 变量与地址(自变量)的对应关系系统可用两种形式的自变量指定,表12-1为自变量指定I的自变量与变量的对应关系。
表12-2为自变量指宾II的自变量与变量的对应关系。
表12-1 自变量指定I的变量对应关系地址(自变量)变量号地址(自变量)变量号地址(自变量)变量号A #1 I #4 T #20B #2 J #5 U #21C #3 K #6 V #22D #7 M #13 W #23E #8 Q #17 X #24F #9 R #18 Y #25H #11 S #19 Z #26在自变量指定I中,G、L、O、N、P不能用,地址I、J、K必须按顺序使用,其它地址顺序无要求。

法兰克Fanuc系统编程用户宏程序教程一、认识法兰克Fanuc系统法兰克Fanuc系统是数控机床领域中广泛应用的一种控制系统,其强大的编程功能为用户提供了极大的便利。
在本教程中,我们将重点介绍用户宏程序的编写与应用,帮助您更好地掌握法兰克Fanuc系统的编程技巧。
二、宏程序基础知识1. 宏程序概念宏程序是一种简化编程过程的方法,它允许用户将复杂的操作步骤封装成一个程序,以便在后续编程中重复调用。
通过使用宏程序,可以大大提高编程效率。
2. 宏程序分类法兰克Fanuc系统中的宏程序分为两类:系统宏程序和用户宏程序。
本教程主要针对用户宏程序进行讲解。
3. 宏程序编写原则(1)简洁明了:尽量使宏程序结构清晰,便于阅读和维护。
(2)通用性强:编写宏程序时,要考虑其在不同场景下的适用性。
(3)易于扩展:预留接口,方便后期对宏程序进行功能扩展。
三、用户宏程序编写步骤1. 确定宏程序功能在编写宏程序之前,要明确宏程序需要实现的功能。
例如,可以实现一个用于加工圆形轮廓的宏程序。
2. 设计宏程序结构(1)宏程序参数:定义输入输出参数,以便在不同场景下调用。
(2)宏程序主体:实现宏程序功能的代码部分。
(3)宏程序调用:在其他程序中调用宏程序。
3. 编写宏程序代码(1)宏程序参数定义:100 = 圆心X坐标101 = 圆心Y坐标102 = 半径103 = 起始角度104 = 终止角度(2)宏程序主体:200 = 100 + 102 COS[103]201 = 101 + 102 SIN[103]G01 X[200] Y[201]IF [103 LT 104] THEN103 = 103 + 1GOTO 100ENDIF(3)宏程序调用:G65 P1000 A100 B101 C102 D103 E104法兰克Fanuc系统编程用户宏程序教程五、实战演练:编写一个钻孔宏程序在这一部分,我们将通过一个具体的实例,来实践如何编写一个用于钻孔的宏程序。
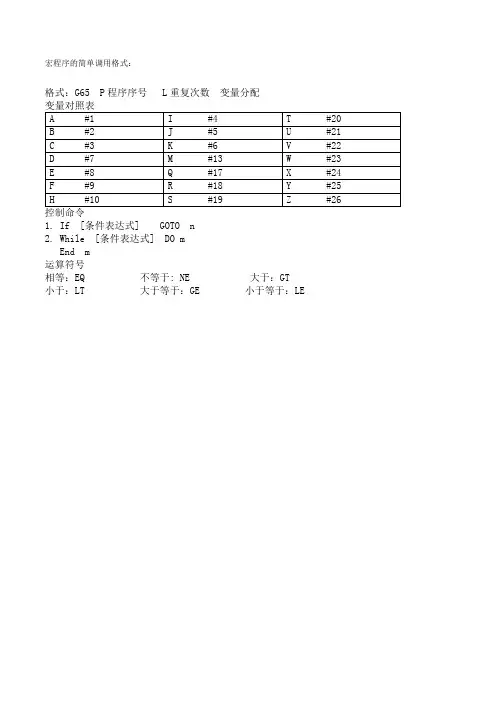
宏程序的简单调用格式:格式:G65 P程序序号 L重复次数变量分配变量对照表A #1 I #4 T #20B #2 J #5 U #21C #3 K #6 V #22D #7 M #13 W #23E #8 Q #17 X #24F #9 R #18 Y #25 H #10 S #19 Z #26 控制命令1.If [条件表达式] GOTO n2.While [条件表达式] DO mEnd m运算符号相等:EQ 不等于: NE 大于:GT小于:LT 大于等于:GE 小于等于:LEFANUC系统宏程式FANUC系统宏程序编程一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
FANUC机器人宏程序相关知识
在程序调试完成后,投入到生产中,我们可以使用几种方法实现程序自动运行,且不需要按住使能键??
第一使用宏程序;
第二使用RSR程序;
第三使用PNS程序;
等等
那么现在小编带你一起学习宏程序的相关知识
一、步骤:
1、打开程序一览界面,如下图所示;
2、按下F2 创建,进入程序创建界面,如下图所示;
3、移动光标选择合适的命名方式,对应按下功能键F1 ~F5,输入与对应的符号,按下 [ENTER] 回车键,如下图所示;
4、再按下F2 详;细,把子类型选择为Macro (宏程序),如下图所示;
5、按下F1 结束,该程序就创建完成,并且编写好程序,如下图所示;
二、启动宏程序
1 按下 MENUS(菜单)键→设置→ 类型→ 宏,进入宏设定界面,如下图所示;
2 光标移到指令名称,按下 ENTER 键,输入名称,如下图所示;
3、光标移到程序,按下F4 选择,点击宏指令,如下图所示;
4 选择我们刚刚所创建的宏程序,如下图所示;
5 光标移到分配,按下F4 选择,选择执行方式(如 RI )如下图所示;
6 通过移动光标,右移到 [ 0 ] 处输入对应RI号码,如下图所示;
7 按下 FCTN 辅助菜单键,选择中止程序,如下图所示;
8 示教器开关模式打至OFF,如下图所示;
9 控制柜模式开关打至AUTO档,如下图所示;
10 示教器处于非单步执行状态,如下图所示;
11 将对应的RI [2] 接通,如下图所示,此时机器人就会运行所设定的宏程序;
这样就可以现实无限循环动作了,并且不需要我们按住使能开关。
END。
宏程序的简单调用格式:格式:G65 P程序序号 L重复次数变量分配控制命令1.If [条件表达式] GOTO n2.While [条件表达式] DO mEnd m运算符号相等:EQ 不等于: NE 大于:GT 小于:LT 大于等于:GE 小于等于:LEFANUC系统宏程式FANUC系统宏程序编程一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号〔#〕和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义一样.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写C运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的围局部变量和公共变量可以有0值或下面围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效围,如此发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
8. 用户宏B 功能使用子程序编程可以重复同样的操作, 简化程序的书写工作,但是用户宏B 提供了更丰富的编程功能, 它允许使用变量、算术和逻辑操作及条件分支,使得用户可以自行编辑软件包、固定循环程序。
8.1变量8.1.1 变量概述一个普通的零件加工程序指定G 码并直接用数字值表示移动的距离,例:G100 X100.0。
而利用用户宏,既可以直接使用数字值也可以使用变量号。
当使用变量号时,变量值既可以由程序改变,也可以用MDI 面板改变。
#1=#2+100 G01 X#1 F300 变量书写规格:当指定一个变量时,在#后指定变量号。
个人计算机允许赋名给变量,宏没有此功能。
例:#1也可以用表达式指定变量号,这时表达式要用方括号括起来。
例:#[#1+#2—12] 变量值的范围:地方变量和公共变量可以有值0和在下述范围内的值:-1047~-10—19;10—29~1047,如果计算结果无效,发出111号报警。
忽略小数点:在程序中定义变量时,可以忽略小数点。
例:当#1=123被定义时,变量#1的实际值为123.000。
未定义的变量:当变量的值未定义时,这样的一个变量被看作“空”变量,变量#0总是“空”变量,是一个只读变量。
变量的类型:根据变量号将变量分为四类,见下表:变量号 #0 #1~#33变量类型功能“空”这个变量总是空的, 不能赋值。
源时,地方变量被初始化成“空”。
宏调用时,自变量分配给地方变量。
#100~#149(#199)公共变量公共变量可在不同的宏程序间共享。
关闭电源时变量#500~#531(#999)#100~#149被初始化成“空”,而变量#500~#531保持数据。
公共变量#150~#199和#532~#999可以选用,但是当地方变量地方变量只能在宏中使用,以保持操作的结果,关闭电第 42 页共 59 页这些变量被使用时,纸带长度减少了8.5米。
#1000~系统变量系统变量用于读写各种NC 数据项,如当前位置、刀具补偿值。
FANUC系统特殊功能指令在数控编程中的应用2008年03月25日星期二11:07 FANUC系统特殊功能指令在数控编程中的应用利用数控系统中的特殊功能指令编写数控加工程序,可以达到简化数控加工程序,提高编程效率的目的。
该文通过实例,介绍了FANUC系统中可编程参数自动设定指令G10与系统中宏指令在利用数控系统中的特殊功能指令编写数控加工程序,可以达到简化数控加工程序,提高编程效率的目的。
该文通过实例,介绍了FANUC系统中可编程参数自动设定指令G10与系统中宏指令在数控编程中配合使用的方法和技巧,可为特殊零件的数控加工程序编制提供参考.在编制零件的数控加工程序时,经常会遇到一些特殊结构的零件,需要加工的部位,其结构相同或相似并且按照一定的规律分布。
对于编程中常见的圆周等分、矩阵等分的孔的加工,我们可以采用厂家提供的固定循环程序来解决,但对于一些特殊零件,其分布的加工部位结构可能是二维和三维轮廓。
针对这种情况,我们也可以采取编写子程序的方法,将加工内容相同的部分编成子程序,然后由主程序多次调用,以此来达到简化程序的目的。
那么,上述方法是不是唯一的解决办法呢?在实践中我们发现,数控系统为用户提供了许多具有特殊意义的G指令、宏指令以及参变量。
这就使我们在编制特殊零件的加工程序时,更容易编制零件的相同加工内容部分的通用程序,而且采用特殊G指令及宏指令、参变量编程,使数控程序更加简化,更具灵活性,如FANUC 15M系统中的可编程参数设定指令G10以及相关的宏指令等。
一、可编程参数设定指令G10及宏指令FANUC 15M系统中的G10指令,可实现刀具几何参数的设定与编辑功能,由程序指令变更刀具加工过程中的半径补偿量。
其另一功能是在加工程序中实现工件坐标系的设定与设定值的变更。
1.G10指令变更刀具补偿量格式:G90/G91 G10 L11 PR;其中,变量L-赋值为11,表示变更刀具补偿量方式;P-刀具补偿号;R-刀具的补偿量;G90-覆盖原有补偿量;G91-在原有补偿量的基础上累加。