发那科宏程序
- 格式:ppt
- 大小:536.00 KB
- 文档页数:7
fanuco9000宏程序参数Fanuco9000宏程序参数是一种用于控制Fanuco9000宏程序运行的设置,它可以根据用户需求进行调整,从而实现更高效的工作流程。
本文将介绍Fanuco9000宏程序参数的一些常见设置和使用方法。
让我们了解一下Fanuco9000宏程序的基本概念。
Fanuco9000是一种功能强大的宏程序,它可以帮助用户自动执行各种任务,从而提高工作效率。
通过设置Fanuco9000宏程序参数,用户可以根据自己的需要调整程序的运行方式,从而实现更加个性化的操作。
Fanuco9000宏程序参数的设置通常包括以下几个方面:1.界面设置:Fanuco9000宏程序的界面可以根据用户的喜好进行调整,比如设置界面的颜色、字体、大小等。
这个设置可以帮助用户更好地适应程序的使用环境,从而提高工作效率。
2.功能设置:Fanuco9000宏程序的功能非常丰富,用户可以根据自己的需要选择使用哪些功能。
比如,用户可以设置程序是否自动保存工作内容,是否自动备份文件等。
这个设置可以帮助用户更好地管理自己的工作,提高工作效率。
3.快捷键设置:Fanuco9000宏程序支持自定义快捷键,用户可以根据自己的使用习惯设置快捷键。
比如,用户可以将某个常用功能设置为一个快捷键,这样就可以通过按下快捷键来快速执行该功能,提高工作效率。
4.数据源设置:Fanuco9000宏程序可以连接各种数据源,比如数据库、文件夹等。
用户可以根据自己的需要设置数据源的连接方式和参数。
这个设置可以帮助用户更好地管理数据,提高工作效率。
5.日志设置:Fanuco9000宏程序可以记录用户的操作日志,用户可以根据自己的需要设置日志的保存位置和格式。
这个设置可以帮助用户更好地追踪自己的工作过程,提高工作效率。
除了上述常见的设置外,Fanuco9000宏程序还支持很多其他的参数设置,比如语言设置、权限设置等。
用户可以根据自己的需要进行相应的设置,从而实现更加个性化的操作。
发那科系统宏程序编程案例发那科系统宏程序编程案例:1. 案例一:自动化机床操作在发那科系统中,可以使用宏程序来实现自动化机床的操作。
例如,可以编写一个宏程序,实现自动换刀功能,即当刀具磨损或需要更换时,自动从刀库中选择合适的刀具进行更换,并调整机床参数以适应新刀具。
这样可以大大提高机床的生产效率和自动化程度。
2. 案例二:加工工艺优化发那科系统宏程序还可以用于优化加工工艺。
例如,可以编写一个宏程序,根据零件的形状、材料和加工要求,自动选择最佳的切削参数,并进行优化。
这样可以提高加工质量和效率,减少加工成本。
3. 案例三:自动测量与修正发那科系统宏程序还可以用于自动测量和修正。
例如,可以编写一个宏程序,利用机床自带的测量装置,自动测量工件的尺寸,并根据测量结果进行修正。
这样可以提高加工精度和一致性。
4. 案例四:自动化装夹发那科系统宏程序还可以用于自动化装夹。
例如,可以编写一个宏程序,根据工件的形状和尺寸,自动选择合适的夹具,并进行自动夹紧和松开。
这样可以提高装夹的精度和速度,减少人工操作。
5. 案例五:自动化卡盘换向发那科系统宏程序还可以用于自动化卡盘换向。
例如,可以编写一个宏程序,根据工件的要求,自动选择合适的卡盘,并自动调整卡盘的位置和方向。
这样可以提高换向的准确性和速度,减少换向的时间和劳动强度。
6. 案例六:自动化测量与质检发那科系统宏程序还可以用于自动化测量和质检。
例如,可以编写一个宏程序,利用机床自带的测量装置,自动测量工件的各项指标,并与标准值进行比较,自动判定合格与否。
这样可以提高质检的准确性和效率,减少人工操作和人为误判。
7. 案例七:自动化数据处理与分析发那科系统宏程序还可以用于自动化数据处理和分析。
例如,可以编写一个宏程序,自动收集机床运行数据,并进行实时分析和统计,生成报表和图表,帮助企业进行生产管理和决策。
这样可以提高生产管理的科学性和效率,减少人工统计和分析的工作量。
FANUC宏程序详解在FANUC系统中,宏程序是一种非常重要的功能,通过编写宏程序,我们可以让机器在无人值守的情况下完成一系列复杂的操作。
本文将对FANUC宏程序进行详细地介绍,包括宏程序的作用、编写方法、语法规则等方面。
1. 宏程序的作用宏程序是指一组可以重复使用的指令序列,通常用于执行一些常见的任务,例如生产线上的自动化操作、零件加工等。
通过编写宏程序,我们可以节省大量的时间和人力成本,提高整个生产线的效率和产能。
在FANUC系统中,宏程序主要有以下两个作用:1.1 缩短程序编写时间FANUC系统使用G代码编写程序,编写复杂的G代码序列会消耗大量的时间和精力。
而宏程序可以将常用的代码封装起来,减少了程序的编写时间。
例如,在加工中心上,我们可以编写一个宏程序来完成换刀操作,这样就可以省去手动编写换刀程序的时间。
1.2 提高工作精确度宏程序可以确保在每一次执行相同的任务时保持一致性,从而提高工作的精确度和可靠性。
例如,在装配生产线上,我们可以编写一个宏程序来完成紧固螺丝的操作,这样就可以确保每次紧固力度一致,避免螺丝过紧或过松的情况发生。
2. 编写宏程序在FANUC系统中,我们可以通过两种方式来编写宏程序:手动编写和自动生成。
手动编写是指通过手工输入代码来编写宏程序,而自动生成则是指通过FANUC系统自动生成宏程序。
2.1 手动编写手动编写是编写宏程序的最常见方式。
在手动编写宏程序时,我们需要按照FANUC系统的语法规则来编写G代码序列,并保存在一个文件中。
一般情况下,宏程序的文件扩展名为“.mac”。
以下是一个简单的宏程序:O1234G00 X10 Y10G01 Z-5 F500M30上述宏程序的功能是将机器头移动到坐标(10,10)点处,然后向下移动5个单位,同时切削速度为500,最后停止机床。
2.2 自动生成除了手工编写宏程序,我们还可以通过FANUC系统自动生成宏程序。
在FANUC系统中,系统提供了各种预制宏程序,我们可以在需要的时候直接调用这些宏程序。
FANUC用户宏程序编程操作说明一、宏程序的概念和作用宏程序是一种FANUC机器人控制器中的编程语言,用于定义和执行一系列操作指令。
宏程序可以通过使用特定的编程语法,实现自动化的工作过程。
在机器人控制器上创建和调用宏程序可以有效提高生产效率,减少人力成本。
4.确认并保存宏程序。
确保没有语法错误,并将其保存在机器人控制器的内存中。
三、宏程序的调用和执行1.在主程序中调用宏程序。
可以使用特定的指令来调用已创建的宏程序,以便在工作流程中执行相关的任务。
2.配置宏程序的输入参数。
在调用宏程序之前,可以设置相关的输入参数,以便宏程序能够根据不同的情况执行不同的动作。
3.执行宏程序。
一旦宏程序被调用和配置完成,机器人控制器将根据宏程序中定义的指令序列依次执行相应的动作。
4.检查宏程序执行结果。
可以通过监视机器人、制作运动轨迹的视觉效果或通过输出信号检查机器人执行宏程序后的运动状态,确保宏程序的执行效果符合预期。
四、宏程序的调试和优化1.进行宏程序的语法和逻辑检查。
在调用和执行宏程序之前,可以使用FANUC机器人控制器提供的调试工具对宏程序进行语法和逻辑检查,以确保程序的正确性。
2.调整宏程序的时间和空间复杂度。
根据实际应用需求和机器人控制器的性能,可以对宏程序进行适当的优化,以减少程序执行时间和占用的内存空间。
3.进行宏程序的场景仿真。
在实际生产环境之前,可以使用机器人控制器提供的仿真工具对宏程序进行虚拟场景的测试,以确保宏程序的执行效果满足预期,同时减少实际生产中的错误和故障。
五、宏程序的应用示例1.示教和运动控制:通过将示教动作转化为相应的宏指令,可以实现机器人在特定位置和角度上的运动控制,以完成精确的操作。
2.任务自动化:将一系列任务步骤组织成宏程序,可以实现从物料处理到产品组装等一系列任务的自动化执行。
3.智能感应:通过编写合适的宏指令,可以实现机器人对环境的感知和判断,并根据实际情况自动调整动作和运动轨迹。
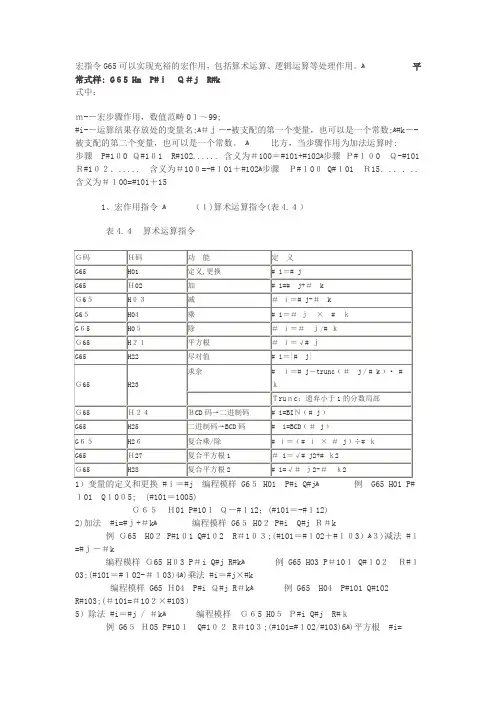
宏指令G65可以实现充裕的宏作用,包括算术运算、逻辑运算等处理作用。
ﻫ平常式样: G65 Hm P#iQ#j R#k式中:m--宏步骤作用,数值范畴01~99;#i--运算结果存放处的变量名;ﻫ#j--被支配的第一个变量,也可以是一个常数;ﻫ#k--被支配的第二个变量,也可以是一个常数。
ﻫ比方,当步骤作用为加法运算时:步骤P#100 Q#101 R#102...... 含义为#100=#101+#102ﻫ步骤P#100 Q-#101 R#102...... 含义为#100=-#101+#102ﻫ步骤P#100 Q#101 R15...... 含义为#100=#101+151、宏作用指令ﻫ(1)算术运算指令(表4.4)表4.4算术运算指令1)无条件转移编程模样G65H80 Pn (n为步骤段号)例G65 H80 P120;(转移到N120)2)条件转移1 #j EQ #k(=)编程模样G65H81Pn Q#j R#k (n为步骤段号)例G65 H81P1000 Q#101 R#102当#101=#102,转移到N1000步骤段;若#101≠#102,履行下一步骤段。
3)条件转移2 #j NE #k(≠)ﻫ编程模样G65 H82 Pn Q#j R#k (n为步骤段号)ﻫ例G65 H82 P1000 Q#101 R#102ﻫ当#101≠ #102,转移到N1000步骤段;若#101=#102,履行下一步骤段。
ﻫ4)条件转移3 #jGT #k(> )ﻫ编程模样G65 H83 Pn Q#j R#k (n为步骤段号)ﻫ例G65 H83P1000 Q#101 R#102当#101 > #102,转移到N1000步骤段;若#101 ≤#102,履行下一步骤段。
ﻫ5)条件转移4 #jLT #k(<)ﻫ编程模样 G65 H84 PnQ#j R#k (n为步骤段号) 例G65 H84 P1000 Q#101 R#102ﻫ当#101 < #102,转移到N1000;若#101≥ #102,履行下一步骤段。
Fanuc用户宏程序基础(NC车床)Fanuc用户宏程序基础1、概要2、变量的指定3、变量(1)局部变量(2)公共变量(3)系统变量4、运算指令5、控制指令6、利用机床内部传感器测外径时宏程序的组合方法以及步骤介绍7、<空>的灵活使用8、刀具最大磨损值作为寿命值9、机床外部测量以及输入输出端口1、概要宏程序对大家来讲都比较困难,即便是阅读了使用说明书。
的确,关于宏程序是有一些比较难以理解的部分,鉴于此种情况,这一次以简单实例并加以详细说明来解释何谓宏程序。
这个教材的对象是已经能够熟练掌握了NC加工编程的人员。
本资料作为参考,希望能够对大家有所帮助。
到现在为止,宏程序是基于NC语言,由主、子程序来组合而成。
说到宏程序和子程序的最大区别就是宏程序能够调用变量。
所以最近机器人、装载机无人化系统上应用到的内部外部测定、刀具破损、刀具寿命管理、负荷监视系统、工件判断等,像这些领域,宏程序就不得不被使用到了。
不管怎么样,总之原本是人进行的作业转由机床来进行,所以要必须方方面面都要考虑到。
另外,本资料针对的是FANUC 18T, 16T, 15T, 11T, 10T, 0T(用户宏程序B), Y ASNUC作为说明对象的。
2、变量指定关于宏变量的调用,请看下例。
(1)形状相同,尺寸不同的时候、各尺寸定义为A~D等变量;(2)刀尖的进给路线1~7的程序用宏程序来编制。
主程序宏程序(3)宏调用及变量指定G65 P9000 A(#1)B(#2)C(#3)D(#7)此命令为编集、输入A~D图面尺寸值,并执行跳转至(O9000)。
像上述程序中,A~D的内容即使更改,A~D也仍然使用对应的#1、#2、#3、#7变量(最初指定后就不能更改)。
这些常数都是分配给局部变量的。
与宏程序相关的指令,除了G65以外还有G66(宏模态调用)、G67(宏模态调用取消)。
如果定义G65,定义的宏程序只被调用一次;G66是模态调用指令,每次轴移动指令都调用宏程序,直到G67(取消模态调用)。
法兰克Fanuc系统编程用户宏程序教程一、认识法兰克Fanuc系统法兰克Fanuc系统是数控机床领域中广泛应用的一种控制系统,其强大的编程功能为用户提供了极大的便利。
在本教程中,我们将重点介绍用户宏程序的编写与应用,帮助您更好地掌握法兰克Fanuc系统的编程技巧。
二、宏程序基础知识1. 宏程序概念宏程序是一种简化编程过程的方法,它允许用户将复杂的操作步骤封装成一个程序,以便在后续编程中重复调用。
通过使用宏程序,可以大大提高编程效率。
2. 宏程序分类法兰克Fanuc系统中的宏程序分为两类:系统宏程序和用户宏程序。
本教程主要针对用户宏程序进行讲解。
3. 宏程序编写原则(1)简洁明了:尽量使宏程序结构清晰,便于阅读和维护。
(2)通用性强:编写宏程序时,要考虑其在不同场景下的适用性。
(3)易于扩展:预留接口,方便后期对宏程序进行功能扩展。
三、用户宏程序编写步骤1. 确定宏程序功能在编写宏程序之前,要明确宏程序需要实现的功能。
例如,可以实现一个用于加工圆形轮廓的宏程序。
2. 设计宏程序结构(1)宏程序参数:定义输入输出参数,以便在不同场景下调用。
(2)宏程序主体:实现宏程序功能的代码部分。
(3)宏程序调用:在其他程序中调用宏程序。
3. 编写宏程序代码(1)宏程序参数定义:100 = 圆心X坐标101 = 圆心Y坐标102 = 半径103 = 起始角度104 = 终止角度(2)宏程序主体:200 = 100 + 102 COS[103]201 = 101 + 102 SIN[103]G01 X[200] Y[201]IF [103 LT 104] THEN103 = 103 + 1GOTO 100ENDIF(3)宏程序调用:G65 P1000 A100 B101 C102 D103 E104法兰克Fanuc系统编程用户宏程序教程五、实战演练:编写一个钻孔宏程序在这一部分,我们将通过一个具体的实例,来实践如何编写一个用于钻孔的宏程序。
FANUC宏程序基础篇吐槽愉快东北这两天真是冷到,⼤爷⼤妈都认不出来了!这两天齐齐哈尔的最低温度-32°C,体感温度竟然达到了-39°C,真是三九不南⾛,四九冻成狗啊!⼀、宏程序的概述虽然⼦程序对⼀个重复操作很有⽤,但若使⽤⽤户宏程序功能,则还可以使⽤变量、运算指令以及条件转移,使⼀般程序(如型腔加⼯和⽤户⾃定义的固定循环等)的编写变得更加容易。
加⼯程序可以⽤⼀个简单的指令调⽤⽤户宏程序,就像调⽤⼦程序⼀样。
普通的加⼯程序直接⽤数值指定G 代码和移动量,例如G00 X100.0。
使⽤⽤户宏程序时,除了可直接指定数值外,还可以指定变量号,可通过程序或MDI ⾯板上操作来改变该数值。
例如:①#1=#2+100 ;②G01 X#1 F300 ;⼆、变量的表达⽅式当指定⼀个变量时,在符号“#”的后⾯指定变量号。
#i (i=1,2,3,4,.....)[例]#5#109#1005或者使⽤后⾯将要叙述的“运算指令”项⽬中的<表达式>,按照如下⽅式表达#[<表达式>][例]#[#100]#[#1001-1]#[#6/2]三、变量的引⽤可以⽤变量指定紧接地址之后的数值。
如果编制⼀个<地址>#i 或<地址>‐#i 的程序,则意味着原样使⽤变量值,或者将其补码作为该地址的指令值。
[例] 当F#33、#33=1.5 时,与指定了F1.5 时的情形相同。
当Z-#18、#18=20.0 时,与指定了Z-20.0 时的情形相同。
当G#130、#130=3.0 时,与指定了G3 时的情形相同。
四、注意事项1、不可引⽤地址/、:、O 和N 中的变量。
[例] 不可编制诸如O#27、N#1 或N[#1]的程序。
2、不可将可选程序段跳过/n 的n(n=1~9)作为变量来使⽤。
不能直接⽤变量来指定变量号。
[例] ⽤#30 来替换#5 的5 时,代之以指定##30,指定#[#30]。
3、不能指定超过每个地址中所确定的最⼤指令值的值。
FANUC机器人宏程序相关知识
在程序调试完成后,投入到生产中,我们可以使用几种方法实现程序自动运行,且不需要按住使能键??
第一使用宏程序;
第二使用RSR程序;
第三使用PNS程序;
等等
那么现在小编带你一起学习宏程序的相关知识
一、步骤:
1、打开程序一览界面,如下图所示;
2、按下F2 创建,进入程序创建界面,如下图所示;
3、移动光标选择合适的命名方式,对应按下功能键F1 ~F5,输入与对应的符号,按下 [ENTER] 回车键,如下图所示;
4、再按下F2 详;细,把子类型选择为Macro (宏程序),如下图所示;
5、按下F1 结束,该程序就创建完成,并且编写好程序,如下图所示;
二、启动宏程序
1 按下 MENUS(菜单)键→设置→ 类型→ 宏,进入宏设定界面,如下图所示;
2 光标移到指令名称,按下 ENTER 键,输入名称,如下图所示;
3、光标移到程序,按下F4 选择,点击宏指令,如下图所示;
4 选择我们刚刚所创建的宏程序,如下图所示;
5 光标移到分配,按下F4 选择,选择执行方式(如 RI )如下图所示;
6 通过移动光标,右移到 [ 0 ] 处输入对应RI号码,如下图所示;
7 按下 FCTN 辅助菜单键,选择中止程序,如下图所示;
8 示教器开关模式打至OFF,如下图所示;
9 控制柜模式开关打至AUTO档,如下图所示;
10 示教器处于非单步执行状态,如下图所示;
11 将对应的RI [2] 接通,如下图所示,此时机器人就会运行所设定的宏程序;
这样就可以现实无限循环动作了,并且不需要我们按住使能开关。
END。
关于发那科系统自动分中宏程序%O001()#5201=0#5202=0#5203=0#101=[?+15.](X-L)长#102=[?+15.](Y-L)宽#103=150(Z)(手动碰边X方向右手边)G0 G91 Z#103 (以下全部打单节执行)#110=#5021X-#101Z-#103(手动碰边X方向)#111=#5021#112=[#111-#110]/2.0X#112#5221=#5021(手动移动自Y面向人一边并碰边)G0 G91 Z#103#120=#5022Y-#102Z-#103(手动碰边Y方向)Z#103#121=#5022#122=[#121-#120]/2.0Y#122#5222=#5022G0 G91 G28 Z0.G0 G90 G54 X0. Y0.%以上程序适合不能在边中间位置分中的工件%O001()#5201=0#5202=0#5203=0#520=54(G54-G59)#521=0(0-1)#101=[?+15.](X-L)长#102=[?+15.](Y-L)宽#103=150(Z)IF[#521 EQ 1] GOTO2GOTO1(手动碰边X方向右手边)N1G0 G91 Z#103 (以下全部打单节执行)#110=#5021X-#101Z-#103(手动碰边X方向)#111=#5021#112=[#111-#110]/2.0X#112(手动移动自Y面向人一边并碰边)G0 G91 Z#103#120=#5022Y-#102Z-#103(手动碰边Y方向)Z#103#121=#5022#122=[#121-#120]/2.0Y#122GOTO2N2IF[#520 EQ 54]GOTO10IF[#520 EQ 55]GOTO11IF[#520 EQ 56]GOTO12IF[#520 EQ 57]GOTO13IF[#520 EQ 58]GOTO14IF[#520 EQ 59]GOTO15GOTO9N10G10 P1X[#5021] Y[#5022]N11G10 P2 X[#5021] Y[#5022]N12G10 P3 X[#5021] Y[#5022]N13G10 P4 X[#5021] Y[#5022]N14G10 P5 X[#5021] Y[#5022]N15G10 P6X[#5021] Y[#5022]GOTO9N9G0 G91 G28 Z0.G0 G90 G#520 X0. Y0.%这个程序适合可以在边中间位置分中的工件#520设置你所需要抄数的工件坐标系,直接修改为G54-G55如果出现方向走反的情况,直接修改红色位置,负改正,正改负即可。
宏程序的简单调用格式:格式:G65 P程序序号 L重复次数变量分配控制命令1.If [条件表达式] GOTO n2.While [条件表达式] DO mEnd m运算符号相等:EQ 不等于: NE 大于:GT 小于:LT 大于等于:GE 小于等于:LEFANUC系统宏程式FANUC系统宏程序编程一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号〔#〕和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义一样.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写C运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的围局部变量和公共变量可以有0值或下面围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效围,如此发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
fanuc宏程序第1类自变量制定法
“fanuc宏程序第1类自变量制定法”这句话的意思是关于FANUC宏程序中的一种自变量制定方法。
FANUC宏程序是一种在数控机床上执行的程序,它可以根据不同的参数和条件来控制机床的运动和加工过程。
自变量制定法是宏程序中的一种方法,它允许用户根据不同的自变量值来控制程序的执行过程。
在FANUC宏程序中,自变量可以定义为程序中的变量,这些变量可以在程序执行过程中被修改或赋值。
自变量制定法允许用户在程序中定义多个自变量,并根据不同的自变量值来选择不同的程序执行路径。
例如,如果一个宏程序中有两个自变量A和B,用户可以根据A和B的值来选择不同的加工路径。
如果A=1且B=2,则程序执行路径1;如果A=2且B=3,则程序执行路径2;如果A=3且B=4,则程序执行路径3。
总结来说,“fanuc宏程序第1类自变量制定法”是一种在FANUC宏程序中根据自变量值来选择不同的程序执行路径的方法。
这种方法可以提高程序的灵活性和可扩展性,使得用户可以根据不同的加工需求和条件来定制程序。