- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
β =1
∂f β ∂zi
)δ zi ]
=0
δ xi , δ yi , δ zi (i = 1,2,Ln) 共3n个,由于存在k个约束,故这3n个变分
有k个不是独立的。然而,由于不定乘子 λβ 可任意选择,总可以
选择适当的 λβ ( β = 1, 2,L , k ),使得某k个虚位移前括号内的量调节为零 而余下3n-k=S个虚位移就是全部独立的了。这样,变分前括号内 的量就全部为零。 ⎧ ∂f β
称此关系为虚功原理。其中 讨论:1.虚功原理是静力学的基本原理。 2.若主动力 Χi 则虚功原理可写成: ,
Χi
i
3.
=0 (i=1,2,……n) 不全是独立的,
=
Χi
除非没有任何约束。
4.虚功原理的最大优点是避免求约束力,最大的弱点也是 不能求约束力。 5.主动力和被动力的区别。 6.非理想约束,虚功原理亦可用,但 应包括非理想约束力. 二、广义坐标下的虚功原理 在约束体系中, 广义坐标的变更 问, 令 与 (i=1,……,3n)不完全独立,而 (α=1,……,s)是彼此独立的。 间的关系如何?以下寻求两者的关系。
i =1 ix i iy i iz i i =1 =1
n
n
k
∂f β
i
δ xi + λβ
∂f β ∂yi
δ yi + λβ
k
∂f β ∂zi
δ zi ]
= ∑ [( Fix + ∑ λβ
i =1
n
k
∂f β ∂xi
β =1
)δ xi + ( Fiy + ∑ λβ
β =1
k
∂f β ∂yi
)δ yi + ( Fiz + ∑ λβ
注:方程右边下标1均应为“,”, 且应补上“ = 0 ”
, ,, 或
f β ( x, y, z ) = 0( β = 1, 2,L k )
↙
体系的自由度 S = 3n − k 2、平衡方程
Q f β ( x, y , z ) = 0, ( β = 1, 2,L k )
δ f β ( x, y , z ) = 0, ( β = 1, 2,L k )
可
2.实位移:质点由于运动而实际发生的位移。以d
)。
表示。(dt
特点:
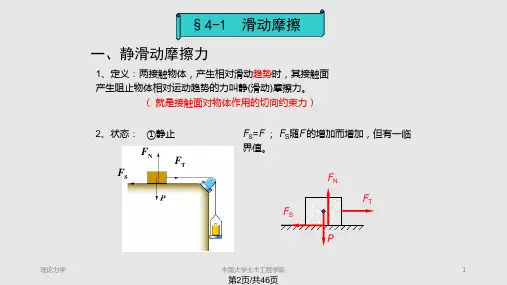
四、虚功和理想约束 虚功:质点作虚位移 W=
时,作用于质点上的力
所作的功
称为虚功。
理想约束:有一种约束,其约束力所做虚功之和为零,则称这 种约束为理想约束。(或无功约束 workless constraint) 如质点约束在光滑曲面运动,这时约束力 方向。故 总沿曲面的法线
⎧ ∂f ⎪ Fx + λ ∂x = 0L (2) ⎪ 据上,平衡方程: ⎪ ∂f = 0L (3) ⎨ Fy + λ ∂y ⎪ ⎪ ∂f = 0L (4) ⎪ Fz + λ ∂z ⎩
从(1)~(4)式可解出x, y, z及 λ
3、 λ 的物理意义
v v v 据上例,(2),(3),(4)分别乘以 i , j , k 并相加得
分析力学也曾被Rutherford 应用于α粒子散射; Sammerfield 应用分析力学理论扩充了Bohr的氢原子模型,为 量子光谱理论开辟了道路。
分析力学的 基本理论体系
§4.1 Basic concepts
一、约束 1、定义:力学体系中,限制质点自由运动的条件称为约束。 x2 + y 2 − l 2 = 0 x2 + y 2 = l 2 如单摆,必须满足 或 的约束条件。
⎪ Fix + ∑ λ β β ⎪ ⎪ ⎪ ⎨ Fiy + ∑ λ β β ⎪ ⎪ ⎪ Fiz + ∑ λ β ⎪ β ⎩ ∂ xi ∂f β ∂yi ∂f β ∂zi =0 = 0 , (i=1,2,L n)L 平 衡 方 程 =0
故有:
这就是3n个平衡方程,它们和k个约束方程联立可解出 3n+k个未知数( 即 xi , yi , zi (i = 1, 2,L , n) 及 λβ ( β = 1, 2,L , k ) 这里 λ(k个) 为拉格朗日不定乘子。 β 例:一个质点约束在一个曲面上,用拉格朗日不定乘子法写出 其平衡方程。 解: 据题意,n=1,k=1, 约束方程为 f(x,y,z) = 0 ………… (1)
∂f v ∂f v ∂f v ( Fx + λ )i + ( Fy + λ ) j + ( Fz + λ )k ∂x ∂y ∂z v v v ∂f v ∂f v ∂f v = Fx i + Fy j + 3,z k + λ i + λ F j +λ k ∂x ∂y ∂z v = F + λ∇f = 0
O
A B F
习题: (4.2), (4.4), (4.6), (4.8)
注意:1.应用虚功原理解题时,符号选取的原则:主动力若与 坐标轴同向,取正号,反之取负号。 2.坐标原点应选在不动点上。否则,在原点变分不为零。 四、拉格朗日不定乘子和约束力 利用虚功原理求平衡条件很方便,但无法求约束力。拉格朗 日不定乘子法既可求平衡条件,又可求约束力。 1、所考虑的力学体系 n个质点,k个完整且稳定的约束,约束方程为:
. 1
% % Δ q = δ q + q (t + Δ t ) − q ( t )
全变分亦称不等时变分,其主要性质: d dq Δq ≠ Δ dt dt
§4.2 Principle of virtual work and its application 一、虚功原理 在理想约束下,力学体系平衡的充要条件为作用于体系的所 有主动力所作的虚功之和等于零,即 W= i ,证明略。
Χi
,
, 即 Χi
(i=1,2,…,n)
则有,
∑ [Χiδ xi +Yiδ yi + Ζiδ zi ] = −∑
i =1
n
∂V δ xi i =1 ∂xi
3n
=- 或 注意到, =0 ( =0
=-
=0
↙
(据虚功原理)
……保守质点组平衡的充要条件 )= , ,必有
可见,在稳定理想约束下,保守质点组平衡的充要条件是势 能具有极值。 例题:两长度分别为l1和l2质量分别为m1和m2的均质杆OA和 OB,位于同一铅直平面内,并在A点光滑铰链相连,OA的另一 端则固定在O点。杆AB的端点B受一水平力F作用,如图示。 求平衡条件。(课堂讲解)
y
θ
l
x
2、分类: 含 如 如 含 (t)
实
有一种运动约束可经积分变为几何约束,如纯滚动。
(Holonomic constraint; Nonholonomic constraint) 几何约束与运动约束是按数学表式来分类的; 而完整约束与 非完整约束是按物理实质来分类的。 3.完整组(系) 只受完整约束的力学体系(质点组)称为完整系(组)。 (以后除特别说明,一般都指完整系) 4、约束力: 迫使力学系统遵守约束条件的力称为约束力。
% δ q = q (t ) − q (t ) = εξ (t )
这里δq 称为等时变分(同在t时刻) 注意,δq与dq不同。δq是由于函数曲线的形状变化所引起; 而dq是由于函数本身q(t)的自变量t的微小变化所引起,如图示。
q
δq
~ q(t)
~ q(t+ Δt)
~
~ q(t)
q(t) dq
t
t+ Δt
(注意这里x,y,z都是缩写)
即有
ห้องสมุดไป่ตู้
v v v v 又第i个质点所受的主动力: Fi = Fix i + Fiy j + Fiz k
i
∑ [ ∂x
i =1
n
∂f β
δ xi +
∂f β ∂yi
δ yi +
∂f β ∂zi
δ zi ] = 0( β = 1, 2,L k )L (1)
v v v v 而第i个质点的虚位移: δ ri = δ xi i + δ yi j + δ zi k
(i=1,……,3n)
(i=1,…,3n)
据虚功原理
,结合上式,有
令
……广义力
则 由于 都是独立的,因而必有
这就是广义坐标下力学体系的平衡方程或虚功原理。 叙述:理想约束下,体系平衡的充要条件是所有广义力等于零。
由上亦可得
(=0)
注意:广义力一般不属于某一质点,也不对应于某一主动力或 其某一分量,而可能与作用在体系上的所有主动力及所有质点 有关。 三、广义坐标下保守组的平衡条件 若作用在质点组上的主动力具有势(保守力), 且注意到
二、自由度和广义坐标 1、自由度 确定系统运动状态所需的独立坐标数称之。 如空间自由质点的自由度为3, 平面运动质点的自由度为2,… 2、自由度与约束方程数的关系 n个质点,k个约束的完整系,其自由度 S=3n-k。 3、广义坐标 建立一个力学体系的动力学方程所必需的独立坐标称之。 或:对自由度为S的完整系,需要S个独立坐标来描述体系的 运动。这S个独立坐标称为广义坐标。以 表示。
讨论:1)广义坐标不限于长度量纲,也可以是:角度
→
,
→
电量q,面积A,体积V,电位移矢量 D ,磁化强度 M 等 2)自由度对一个系统是唯一确定的,而广义坐标则可多 种选取。例:
3)对非完整约束,自由度总小于广义坐标数。 (自由度=广义坐标数-非完整约束方程数) 三、虚位移和实位移(Virtual displacement and actual displacement) 1.虚位移:质点在某时刻的虛位移是指质点在该时刻的约束条件 → 下所允许作的任意无限小位移,以 δ r 表示。 特点: