平面机构自由度计算-例题
- 格式:ppt
- 大小:364.50 KB
- 文档页数:10
平面机构(运动链)自由度计算辅导运动链是指假设干个构件通过运动副连接而成的系统。
运动链自由度计算要紧解决的问题是:一、运动链的可动性;二、运动链运动的确信性,即运动链成为机构的条件。
一、平面机构(运动链)自由度:㈠、计算公式:F=3n-2P L-P H⑴式中:F—机构(运动链)自由度;n—机构(运动链)中的运动构件数;P L—机构(运动链)中低副数,包括移动副和转动副;P H—机构(运动链)中的高副数。
㈡、公式用途:运动链类型:⑴、固定运动链:组成运动链的构件之间没有相对运动。
如桥梁、钢结构支架等。
⑵、可动运动链:①、运动不确信的可动运动链:运动链可动,但运动链中构件的运动不能确信。
②、具有确信运动的运动链及机构。
运动链中构件的具有确信性。
一、判别运动链可否运动(运动链可动性分析):⑴、当F﹥0 运动链能运动,即运动链是可动的。
⑵、当F≦0 运动链不动,即运动链为固定运动链。
例:判别下面运动链的可动性:图示:n=3,P L=4,P H=1 。
F=3n-2P L-P H =3×3-2×4-1=0运动链不可动。
图示:n=4,P L=5,P H=1 。
F=3n-2P L-P H =3×4-2×5-1=1﹥0运动链可动。
二、判别运动链是不是成为机构:运动链的运动确信性分析。
⑴、当F≦0 运动链不可动,此种运动链不能成为机构;⑵、当F﹥0 运动链可动:①、假设F﹥原动件数,运动链不能成为机构;②、假设F=原动件数,运动链运动确信,运动链成为机构;③、假设F﹤原动件数,运动链不能成为机构。
结论:运动链成为机构的条件:F﹥0,且F等于机构原动件数。
㈢、机构自由度计算时应注意的问题:一、复合铰链及其处置方式:⑴、概念:复合铰链:多个构件(含固定件)在同一处形成两个或两个以上转动副,该处成为复合铰链。
⑵、处置方式:P L=m-1,m为该处构件数(含固定件)。
⑶、常见形式:①、②、③、④、例:计算下面运动链自由度,说明要使运动链成为机构需要几个原动件。
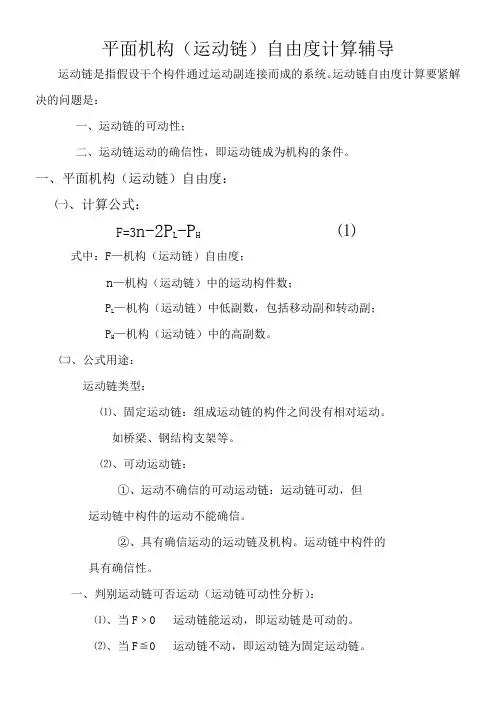
1. 计算齿轮机构的自由度.解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。
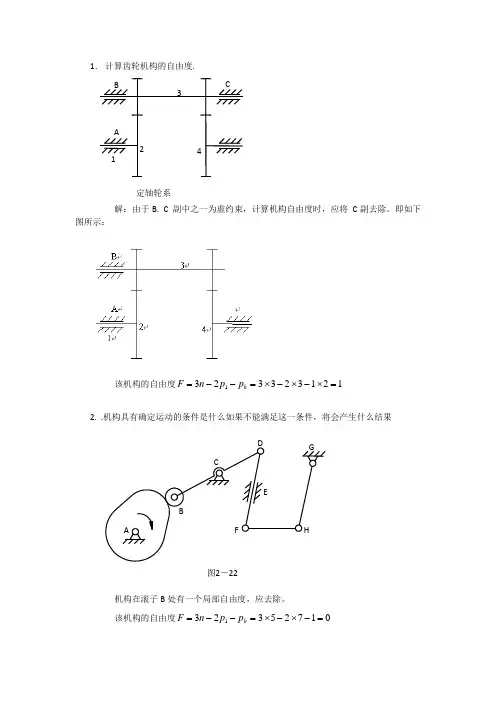
即如下图所示:该机构的自由度1213233231=⨯-⨯-⨯=--=h p p n F2..机构具有确定运动的条件是什么如果不能满足这一条件,将会产生什么结果机构在滚子B 处有一个局部自由度,应去除。
该机构的自由度017253231=-⨯-⨯=--=h p p n F定轴轮系ABC1234图2-22ABCDGEHF当自由度F=1时,该机构才能运动, 如果不能满足这一条件,该机构无法运动。
该机构当修改为下图机构,则机构可动:N=4, PL=5, Ph=1;F=⨯-⨯-=自由度3425113. 计算机构的自由度.1)由于机构具有虚约束, 机构可转化为下图机构。
F=⨯-⨯-=自由度3425112)由于机构具有虚约束, 机构可转化为下图机构。
F=⨯-⨯=自由度312113)由于机构具有虚约束, 机构可转化为下图机构。
F=⨯-⨯=自由度33241第一章平面机构的运动简图及自由度一、判断题(认为正确的,在括号内画√,反之画×)1.机构是由两个以上构件组成的。
()2.运动副的主要特征是两个构件以点、线、面的形式相接触。
()3.机构具有确定相对运动的条件是机构的自由度大于零。
()4.转动副限制了构件的转动自由度。
()5.固定构件(机架)是机构不可缺少的组成部分。
()个构件在一处铰接,则构成4个转动副。
()7.机构的运动不确定,就是指机构不能具有相对运动。
()8.虚约束对机构的运动不起作用。
()二、选择题1.为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。
A.构件数、运动副的类型及数目B.构件的运动尺寸C.机架和原动件D. A 和B 和C2.下面对机构虚约束的描述中,不正确的是()。
A.机构中对运动不起独立限制作用的重复约束称为虚约束,在计算机构自由度时应除去虚约束。
B.虚约束可提高构件的强度、刚度、平稳性和机构工作的可靠性等。
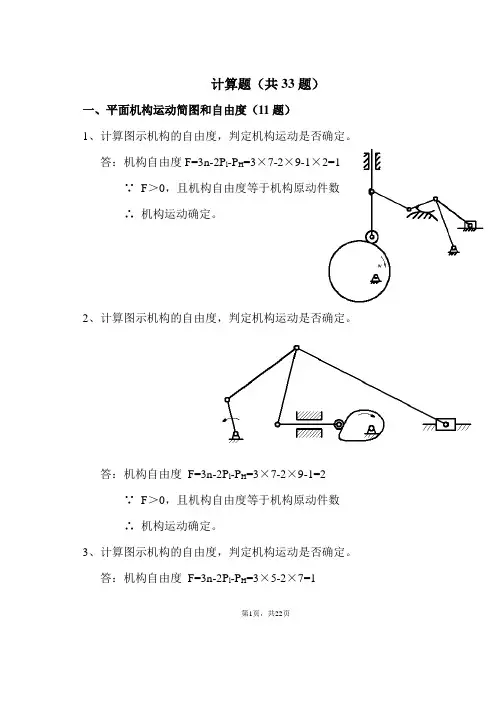
计算题(共33题)一、平面机构运动简图和自由度(11题)1、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度F=3n-2P l-P H=3×7-2×9-1×2=1 ∵F>0,且机构自由度等于机构原动件数∴机构运动确定。
2、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度F=3n-2P l-P H=3×7-2×9-1=2∵F>0,且机构自由度等于机构原动件数∴机构运动确定。
3、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度F=3n-2P l-P H=3×5-2×7=1第1页,共22页第2页,共22页∵ F >0,且机构自由度等于机构原动件数∴ 机构运动确定。
4、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度 F=3n-2P l -P H =3×4-2×5-1=1∵ F >0,且机构自由度等于机构原动件数∴ 机构运动确定。
5、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度 F=3n-2P l -P H =3×3-2×3-2=1∵ F >0,且机构自由度等于机构原动件数∴ 机构运动确定。
第3页,共22页6、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度 F=3n-2P l -P H =3 ∵ F >0 ∴ 机构运动确定。
7、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度 F=3n-2P l -P H =3×5-2×7=1∵ F >0 ∴ 机构运动确定。
8答:机构自由度 F=3n-2P l -P H =3×8-2×11-1=1∵ F >0 ∴ 机构运动确定。
第4页,共22页9、计算图示机构的自由度,判定机构运动是否确定。
答:机构自由度 F=3n-2P l -P H =3×4-2×4-2=2∵ F >0 ∴ 机构运动确定。
平面机构(运动链)自由度计算辅导运动链是指若干个构件通过运动副连接而成的系统。
运动链自由度计算主要解决的问题是:1、运动链的可动性;2、运动链运动的确定性,即运动链成为机构的条件。
一、平面机构(运动链)自由度:㈠、计算公式:F=3n-2P L-P H⑴式中:F—机构(运动链)自由度;n—机构(运动链)中的运动构件数;P L—机构(运动链)中低副数,包括移动副和转动副; P H—机构(运动链)中的高副数。
㈡、公式用途:运动链类型:⑴、固定运动链:组成运动链的构件之间没有相对运动。
如桥梁、钢结构支架等。
⑵、可动运动链:①、运动不确定的可动运动链:运动链可动,但运动链中构件的运动不能确定。
②、具有确定运动的运动链及机构。
运动链中构件的具有确定性。
1、判别运动链能否运动(运动链可动性分析):⑴、当F﹥0 运动链能运动,即运动链是可动的。
⑵、当F≦0 运动链不动,即运动链为固定运动链。
例:判别下面运动链的可动性:图示:n=3,P L=4,P H=1 。
F=3n-2P L-P H =3×3-2×4-1=0运动链不可动。
图示:n=4,P L=5,P H=1 。
F=3n-2P L-P H =3×4-2×5-1=1﹥0运动链可动。
2、判别运动链是否成为机构:运动链的运动确定性分析。
⑴、当F≦0 运动链不可动,此种运动链不能成为机构;⑵、当F﹥0 运动链可动:①、若F﹥原动件数,运动链不能成为机构;②、若F=原动件数,运动链运动确定,运动链成为机构;③、若F﹤原动件数,运动链不能成为机构。
结论:运动链成为机构的条件:F﹥0,且F等于机构原动件数。
㈢、机构自由度计算时应注意的问题:1、复合铰链及其处理方法:⑴、概念:复合铰链:多个构件(含固定件)在同一处形成两个或两个以上转动副,该处成为复合铰链。
⑵、处理方法:P L=m-1,m为该处构件数(含固定件)。
⑶、常见形式:①、②、③、④、例:计算下面运动链自由度,说明要使运动链成为机构需要几个原动件。

[1]决定机构具有确定运动的独立运动参数称为机构的__________________。
[4]形成运动副的两个构件只能在一个平面内相对转动叫_________________________。
[5]房门的开关运动,是____________________副在接触处所允许的相对转动。
[6]在平面机构中,具有两个约束的运动副是___________副。
[7]由于组成运动副中两构件之间的________________形式不同,运动副分为高副和低副。
[8]两构件之间作________________接触的运动副,叫低副。
[9]5个构件组成同一回转轴线的转动副,则该处共有_____________个转动副。
[10]平面运动副的最大约束数为________,最小约束数为__________。
[11]平面机构中若引入一个高副将带入_________个约束,而引入一个低副将带入_________个约束。
[12]机构具有确定运动的条件是_______________________________________________________________________________________________。
[13]机构具有确定运动的条件是__________的数目等于自由度数F(F>0)。
[14]当机构的原动件数目_______________其自由度时,该机构具有确定的运动。
[15]运动副是指能使两构件之间既保持________________接触。
而又能产生一定形式相对运动的_____________。
[16]抽屉的拉出或推进运动,是______________副在接触处所允许的相对移动。
[17]两构件之间作______________或____________接触的运动副,叫高副。
[18]组成机构的要素是__________________和________________。
[19]机构中的复合铰链是指________________________________________________________。
一、填空题1.机构中各个构件相对于机架能够产生独立运动的数目称为(自由度)。
2.平面机构的自由度计算公式为:(F=3n-2P L-P H)。
3.从机构结构观点来看,任何机构是由_原动件_、__机架_、_从动件三部分组成。
4.构件的自由度是指构件所具有的独立运动的数目5.两构件之间以线接触所组成的平面运动副,称为高副,它产生1个约束,而保留 2 个自由度。
6.机构中的运动副是指使两构件直接接触并产生一定相对运动的连接7.机构具有确定的相对运动条件是原动件数等于机构的自由度。
8.在平面机构中若引入一个高副将引入_1_个约束,而引入一个低副将引入_2_个约束,构件数、约束数与机构自由度的关系是F=3n-2PL -PH。
9.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为 2 ,至少为 1 。
10.在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
11.计算平面机构自由度的公式为F= F=3n-2PL -PH,应用此公式时应注意判断:A. 复合铰链,B.局部自由度,C.虚约束。
12.机构中的复合铰链是指;局部自由度是指;虚约束是指。
13.机构运动简图是的简单图形。
14.机构中,若两构件之间既相互直接接触,又具有一定的相对运动,形成一种可动连接称为运动副,通过面接触而形成的联接称为低副,通过点或线接触而形成的联接称为高副。
15.构成机构的要素是零件和构件;构件是机构中的运动单元体。
16.运动副是指能使两构件之间既能保持_直接_接触,而又能产生一定的形式相对运动的_联接__。
17.图示机构要有确定运动需要有__1_个原动件。
18.平面运动副可分为低副和高副,低副又可分为转动副和移动副。
19.运动副是使两构件接触,同时又具有确定相对运动的一种联接。
平面运动副可分为低副和高副。
20.平面运动副的最大约束数为2 。
21、机构具有确定相对运动的条件是机构的自由度数目等于主动件数目。
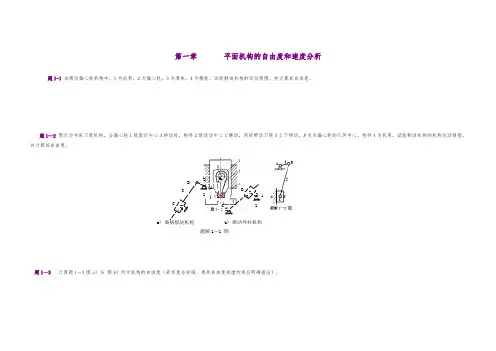
第一章机构的组成和结构1-1 试画出图示平面机构的运动简图,并计算其自由度。
F=3×3-2×4=1 F=3×3-2×4=1F=3×3-2×4=1 F=3×3-2×4=11-2 计算图示平面机构的自由度。
将其中高副化为低副。
确定机构所含杆组的数目和级别,以及机构的级别。
(机构中的原动件用圆弧箭头表示。
)F=3×7-2×10=1 F=3×7-2×10=1含3个Ⅱ级杆组:6-7,4-5,2-3。
含3个Ⅱ级杆组:6-7,4-5,2-3。
该机构为Ⅱ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×4-2×5-1=1 F=3×3-2×3-2=1F=3×5-2×7=1(高副低代后) F=3×5-2×7=1(高副低代后)含1个Ⅲ级杆组:2-3-4-5。
含2个Ⅱ级杆组: 4-5,2-3。
该机构为Ⅲ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×8-2×11-1=1 F=3×6-2×8-1=1F=3×9-2×13=1(高副低代后)F=3×7-2×10=1(高副低代后)含4个Ⅱ级杆组:8-6,5-7,4-3,2-11。
含1个Ⅱ级杆组6-7。
该机构为Ⅱ级机构含1个Ⅲ级杆组2-3-4-5。
第二章 连 杆 机 构2-1 在左下图所示凸轮机构中,已知r = 50mm ,l OA =22mm ,l AC =80mm,︒=901ϕ,凸轮1的等角速度ω1=10rad/s ,逆时针方向转动。
试用瞬心法求从动件2的角速度ω2。
解:如右图,先观察得出瞬心P 13和P 23为两个铰链中心。
再求瞬心P 12:根据三心定理,P 12应在P 13与P 23的连线上,另外根据瞬心法,P 12应在过B 点垂直于构件2的直线上,过B 点和凸轮中心O 作直线并延长,与P 13、P 23连线的交点即为P 12。
平面机构自由度的计算1、单个自由构件的自由度为 3如所示,作平面运动的刚体在空间的位置需要三个独立的参数(x ,y, θ)才能唯一确定。
2、构成运动副构件的自由度图2—19运动副自由度运动副 自由度数 约束数回转副 1(θ) + 2(x ,y ) =3 移动副 1(x ) + 2(y ,θ) =3 高 副 2(x,θ) + 1(y ) =3结论:构件自由度=3-约束数3、平面机构的自由度1)机构的自由度:机构中活动构件相对于机架所具有的独立运动的数目。
2).机构自由度计算公式 H P -=L 2P -3n F式中: n-------活动构件数目(不包含机架) L P -----低副数目(回转副、移动副) H P ------高副数目(点或线接触的)运动副低副(面接触)移动副高副(点或线接触)约束数为2约束数为1例题1: 计算曲柄滑块机构的自由度。
解:活动构件数n=3低副数 PL=4 高副数 PH=0H P -=L 2P -3n F 图 曲柄滑块机构=3×3 - 2×4 =1例题2:计算五杆铰链机构的自由度。
解:活动构件数n=4低副数 PL=5 高副数 PH=0H P -=L 2P -3n F 图 五杆铰链机构=3×4 - 2×4 =2例题3: 计算凸轮机构的自由度 解:活动构件数n=2低副数 PL=2 高副数 PH=1H P -=L 2P -3n F=3×2 -2×2-1=1 图 凸轮机构4.机构具有确定运动的条件原动件的数目=机构的自由度数F (F >0或F≥1)。
若 原动件数<自由度数,机构无确定运动; 原动件数>自由度数,机构在薄弱处损坏。
(a)两个自由度(b)一个自由度(c)0个自由度图3-11 不同自由度机构的运动5.计算机构自由度时应注意的事项1)复合铰链:两个以上个构件在同一条轴线上形成的转动副。
由m个构件组成的复合铰链,共有(m-1)个转动副。