1章机构自由度计算
- 格式:doc
- 大小:1.41 MB
- 文档页数:6
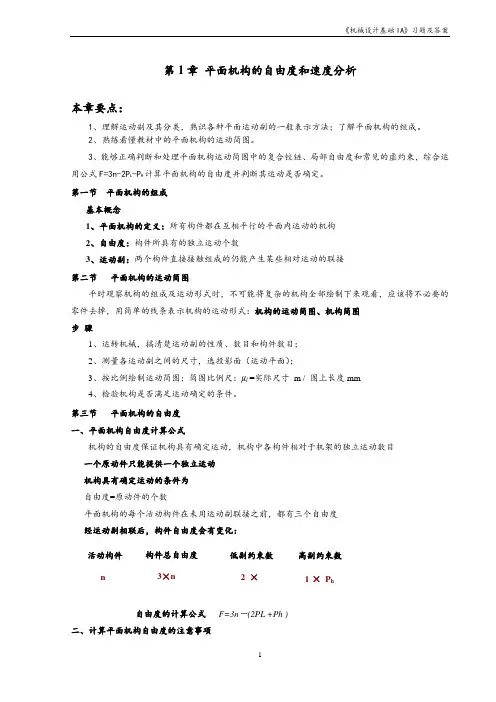
第1章 平面机构的自由度和速度分析本章要点:1、理解运动副及其分类,熟识各种平面运动副的一般表示方法;了解平面机构的组成。
2、熟练看懂教材中的平面机构的运动简图。
3、能够正确判断和处理平面机构运动简图中的复合铰链、局部自由度和常见的虚约束,综合运用公式F=3n-2P L -P H 计算平面机构的自由度并判断其运动是否确定。
第一节 平面机构的组成基本概念1、平面机构的定义:所有构件都在互相平行的平面内运动的机构2、自由度:构件所具有的独立运动个数3、运动副:两个构件直接接触组成的仍能产生某些相对运动的联接 第二节 平面机构的运动简图平时观察机构的组成及运动形式时,不可能将复杂的机构全部绘制下来观看,应该将不必要的零件去掉,用简单的线条表示机构的运动形式:机构的运动简图、机构简图 步 骤1、运转机械,搞清楚运动副的性质、数目和构件数目;2、测量各运动副之间的尺寸,选投影面(运动平面);3、按比例绘制运动简图;简图比例尺:μl =实际尺寸 m / 图上长度mm4、检验机构是否满足运动确定的条件。
第三节 平面机构的自由度 一、平面机构自由度计算公式机构的自由度保证机构具有确定运动,机构中各构件相对于机架的独立运动数目 一个原动件只能提供一个独立运动 机构具有确定运动的条件为 自由度=原动件的个数平面机构的每个活动构件在未用运动副联接之前,都有三个自由度 经运动副相联后,构件自由度会有变化:自由度的计算公式 F=3n -(2PL +Ph )二、计算平面机构自由度的注意事项活动构件 构件总自由度 3×n 低副约束数 2 × P高副约束数1 × P h n1、复合铰链:两个以上的构件在同一处以转动副相联2、局部自由度:与输出件运动无关的自由度出现在加装滚子的场合,计算时应去掉Fp3、虚约束:对机构的运动实际不起作用的约束计算自由度时应去掉虚约束第四节速度瞬心及在机构速度分析上的应用机构运动分析的任务、目的和方法(1)任务:在已知机构尺寸及原动件运动规律的情况下,确定机构中其他构件上某些点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度。
课程思政优秀案例——《机械原理》:机构自由度的计算一、课程和案例的基本情况课程名称:机械原理授课对象:机械类专业大二本科生课程性质:专业核心必修课课程简介:机械原理是机械类专业必修课,以机构设计和分析为主线,培养学生具有一定的机械系统运动方案创新设计能力,教学内容涵盖机构组成理论、运动学、动力学及各种常用机构的设计方法等机构和机器的共性问题,具有较强的综合性和工程实践性,在学生整个学习过程中起着承上启下和培养学生创新思维、综合设计能力及工程实践能力的重要作用。
结合我校人才培养定位及机械类专业特色,机械原理课程不断强化以学生为中心的顶层设计和教学实施,针对课程重点难点,精心设计课堂学习、研究性学习、实验学习和综合性课程实践等教学环节,通过科教融合、资源建设、教学模式改革、课赛结合等,从不同维度提升课程的高阶性、创新性和挑战度,培养学生的创新意识、辩证思维、现代工具应用能力、综合设计能力和解决复杂工程问题能力,并通过学生形成性考核评价和课程质量评价促进课程持续改进。
与此同时,深入挖掘课程育人功能,提出“四融合一示范”课程思政建设思路,将教书育人贯穿于课程教学及实践活动全过程,强化学生在智能制造强国战略中的责任意识和使命担当,实现价值塑造、知识传授和能力培养同向同行。
案例简介:机构结构分析是机构运动分析、力分析和机构设计的基础,是机械系统方案设计和机构创新设计的重要环节。
本案例的教学内容为“机构自由度的计算”,是机构结构分析一章的重点,具体包括“机构具有确定运动的条件、机构自由度的计算和计算平面机构自由度时应注意的事项”,机构自由度计算结果正确与否,直接影响机构运动的可能性和确定性判断,进而影响机构设计方案可行性的评价。
本讲的学习目标:知识传授:①理解平面机构自由度计算公式及其内涵;②准确识别并正确处理机构中的复合铰链、局部自由度和虚约束;③正确运用自由度计算公式计算机构的自由度,并判断其是否具有确定的运动。
机械设计基础第一章机构自由度计算机构自由度是机械设计中的重要概念,用于描述机构的自由运动能力。
在机械设计中,机构是由多个刚性杆件和连接件组成,起到连杆传动或者变换运动的作用。
机构的自由度计算是机械设计的基础,它能够帮助工程师确定机构的设计方案,确保机构能够完成预期的运动任务。
机构的自由度是机构中自由运动的最大数量。
也就是说,机构在特定约束下能够独立运动的最大自由度数目。
在机构设计中,自由度计算通常用于确定机构的可运动数量,以及判断机构设计是否满足要求,为机械设计提供指导。
机构的自由度计算基于以下几个原则:1.机构中刚性杆件的数量与连接件的数量是一致的。
每个连接点都需要一个连接件连接至少两个刚性杆件。
2.每个刚性杆件的两个连接点分别属于两个连接件,除非这个杆件是机构的基座。
3.每个连接点至少有一个约束,包括固定约束(连接点位置固定)、转动约束(杆件绕连接点旋转)和滑动约束(杆件在连接点滑动)。
在实际的机构设计计算中,可以通过以下步骤进行机构自由度的计算:1.确定机构中的刚性杆件数量和连接点数量。
2.根据连接点的约束情况,计算机构中的自由度。
-如果连接点有固定约束,则自由度减1-如果连接点有转动约束,则自由度减1-如果连接点有滑动约束,则自由度减2-如果连接点既有转动约束又有滑动约束,则根据实际情况确定减1或者减23.将所有刚性杆件加起来得到总刚性杆件数量,减去连接件数量,即可得到机构的自由度。
需要注意的是,在机构自由度的计算中,每个连接点只能属于一个连接件,而且一个连接件只能连接两个刚性杆件。
如果机构中存在复杂的连接关系,可以将其分解为多个简单的子机构,再分别计算子机构的自由度。
机构自由度的计算在机械设计中具有重要的意义,它能够帮助机械工程师理解机构的运动特性,优化机构设计方案。
通过合理的自由度计算,可以保证机构能够顺利完成预期的运动任务,提高机械系统的性能。
因此,机构自由度的计算是机械设计中不可忽视的一环。
机械原理第1章平面机构的自由度平面机构是由若干个刚体连接而成的机械装置,在平面内具有一定的运动自由度。
自由度可以理解为机构在平面内可以自由运动的独立变量数量。
平面机构的自由度决定了机构能够完成的运动类型和运动方式。
本文将介绍平面机构的自由度及其计算方法。
1.平面机构的自由度概述平面机构的自由度是指机构在平面内可以独立变化的运动数量。
自由度主要用来衡量机构的可动性。
平面机构的自由度与机构中连杆数量、铰链数量和约束数量有关。
2.平面机构的自由度计算方法计算平面机构的自由度需要考虑以下几个因素:(1)每个连接处的约束数量:连接处的约束数量主要包括铰链和滑动副的数量。
每个铰链都会增加机构的一个自由度,而滑动副不会增加机构的自由度。
(2)连杆数量:连杆数量决定了机构的自由度上限。
当机构的连杆数量等于自由度时,机构将达到满足完整约束的状态。
(3)约束条件:约束条件包括几何约束和运动约束。
几何约束是由机构的结构确定的,它限制了机构的运动范围。
运动约束是由机构的运动特性确定的,它限制了机构可进行的运动类型。
根据以上因素,计算平面机构的自由度的一般方法如下:(1)确定机构中的连杆数量和连接处的约束数量;(2)根据每个连接处的约束数量计算机构的几何约束;(3)根据机构的几何约束和运动约束计算机构的自由度。
3.平面机构自由度的实例分析以常见的四杆机构为例来说明平面机构自由度的计算方法。
四杆机构由四个连杆和四个铰链连接而成。
(1)连杆数量:四杆机构中连杆的数量为4(2)连接处的约束数量:四杆机构中每个连接处都是铰链连接,因此约束数量为4(3)几何约束:四杆机构中的几何约束是由四个连杆的长度和位置确定的。
根据欧拉公式,每个连接处的铰链都会增加一个约束条件。
因此,四杆机构中总共有4个几何约束。
(4)运动约束:四杆机构中的运动约束主要来自于连杆的连接方式和几何约束。
通过分析四杆机构的连杆和铰链的连接方式,可以得出四杆机构中由于几何约束而引入的自由度为1、因此,四杆机构的运动约束为1根据以上计算方法,四杆机构的自由度等于约束数量减去几何约束和运动约束的数量,即自由度=4-4-1=-1、这表明四杆机构无法进行独立的运动,它不是一个有效的机构。
第1章习题
1-1 绘出图1-7所示的唧筒机构的机构运动简图。
1-2 绘出图1-8所示叶片式油泵的机构运动简图。
1-3 绘出图1-9所示回转柱塞泵的机构运动简图。
1-4 绘出图1-10所示冲床架机构的机构运动简图。
1-5 试判断图1-11、图1-12所示运动链能否成为机构,并说明理由。
若不能成为机构,请提出修改办法。
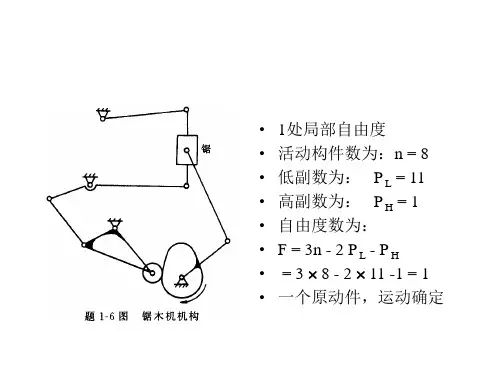
1-6 计算图1-13至图1-20所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度时应做何处理。
1-7 计算图1-21至图1-26所示各机构的自由度,用低副代替高副,并确定机构所含杆组的数目和级别以及机构的级别。
第1章综合测试题
1-1 填空题及简答题
(1)平面机构中若引入一个高副将带入个约束,而引入一个低副将带
入人约束。
(2)高副低代必须满足的条件是,。
(3)何谓运动链?运动链具备什么条件才具有运动的可能性?具备什么条件才具有运动的确定性?运动链具备什么条件才能成为机构?
(4)何谓机构运动简图?绘制的步骤如何?
(5)机构具有确定运动的条件是什么?
(6)在计算平面机构自由度时应注意哪些事项?
(7)杆给具有什么特点?如何确定杆组的级别?
(8)如果确定机构的级别?选择不同原动件对机构的级别有无影响?
1-2 画出图1-27所示油泵的机构运动简图,并计算其自由度。
1-3 判别图1-28、图1-29所示运动链能否成为机构,并说明理由。
如果有复合铰链、局部自由度或虚约束,需一一指出。
1-4 试用低副代替图1-30所示机构中的高副,并说明高副低代的一般方法。
1-5 图1-31所示为一机构的初拟设计方案,试从机构自由度的概念分析其设计是否会理,并提出修改措施。
又问,在此初似设计方案中,是否存在复合铰链、局部自由度和虚约束?
1-6 计算图1-32所示机构的自由度,并在高副低代后,确定机构所含杆组的数目和级别并判断机构的级别。
第1章习题参考答案
1-5 F=0,机构不能运动
F=0,机构不能运动
1-6 F=1
F=1
F=1
F=2
F=1
F=1
F=1
F=1
1-7 F=1,Ⅱ级机构
F=1,Ⅱ级机构
F=1,Ⅱ级机构
F=1,Ⅲ级机构,一个Ⅱ级杆组,一个Ⅱ级杆组
F=1,Ⅱ级机构
F=1,Ⅲ级机构
第1章综合测试题参考答案
1-2 F=1
1-3 F=0,不能成为机构;F=1,能成为机构,F(G)为虚约束1-5 E为虚约束,B为局部自由度
1-6 F=1,一个Ⅲ级杆组,一个Ⅰ级杆组,Ⅲ级机构。