机构的组成及其自由度的分析计算DOC
- 格式:doc
- 大小:489.00 KB
- 文档页数:28
一、机构的组成及其自由度的分析计算(共170题)1.组成机构的要素是和;构件是机构中的单元体。
2.具有、、等三个特征的构件组合体称为机器。
3.机器是由、、所组成的。
4.机器和机构的主要区别在于。
5.从机构结构观点来看,任何机构是由三部分组成。
6.运动副元素是指。
7.构件的自由度是指。
机构的自由度是指。
8.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。
9.机构中的运动副是指。
10.机构具有确定的相对运动条件是原动件数机构的自由度。
11.在平面机构中若引入一个高副将引入___个约束,而引入一个低副将引入____个约束,构件数、约束数与机构自由度的关系是12.平面运动副的最大约束数为,最小约束数为。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。
15.计算机机构自由度的目的是______________________________。
16.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
17.计算平面机构自由度的公式为F= ,应用此公式时应注意判断:(A) 铰链,(B) 自由度,(C) 约束。
18.机构中的复合铰链是指;局部自由度是指;虚约束是指。
19.划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。
20.机构运动简图是的简单图形。
31.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
--------------()32.一种相同的机构组成不同的机器。
(A) 可以;(B) 不能33.机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。
(A) 可以;(B)不能34.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由等于。
(A) 0;(B) 1;(C) 235.原动件的自由度应为。
(A) 1;(B) +1;(C) 036.基本杆组的自由度应为。
平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。

机构自由度计算原理和方法机构自由度计算那可是相当重要哇!这就好比是给机构做一次全面的体检,能让我们清楚地了解机构的运动能力和灵活性。
那到底啥是机构自由度呢?简单来说,就是机构具有独立运动的数目。
计算机构自由度的步骤那可得仔细说说。
首先,要确定机构中的活动构件数目。
这就像是数数一样,把那些能运动的部分都找出来。
然后呢,计算低副和高副的数目。
低副就像是两个构件之间的紧密连接,比如转动副、移动副啥的。
高副呢,就是点接触或者线接触的地方,比如凸轮和从动件之间的接触。
接着,就可以用公式F = 3n - 2PL - PH 来计算自由度啦。
这里的n 是活动构件数目,PL 是低副数目,PH 是高副数目。
在计算过程中有啥注意事项呢?哎呀,那可不少呢!首先得正确判断活动构件和固定构件,可不能搞错了。
还有啊,对于复杂的机构,要仔细分析各个部分的连接关系,别漏算或者多算了低副和高副。
这就好比做饭的时候,要是调料放错了,那味道可就全变啦!那在这个过程中安全性和稳定性又咋体现呢?如果机构的自由度计算不准确,就可能导致设计出的机构在运动过程中出现不稳定的情况。
比如说,自由度太多了,机构可能会变得过于灵活,甚至出现乱动的情况,这多吓人啊!相反,如果自由度太少,机构可能就无法按照预期的方式运动,那不是白忙活了嘛。
所以啊,准确计算机构自由度对于保证机构的安全性和稳定性至关重要。
机构自由度计算的应用场景那可多了去了。
在机械设计中,它可以帮助设计师确定机构的运动方案,选择合适的构件和连接方式。
在机器人领域,更是离不开自由度的计算,只有准确知道机器人的自由度,才能让它完成各种复杂的动作。
这就像给机器人装上了一双灵活的手脚,让它能在各种环境中大展身手。
它的优势也是显而易见的。
通过计算自由度,可以快速评估机构的性能,节省设计时间和成本。
而且,还能提前发现潜在的问题,避免在实际生产中出现故障。
这不是一举两得嘛!咱再来看看实际案例。
比如说汽车的发动机,里面就有很多复杂的机构。
第二章机构的组成及其自由度的计算一、学习要求1.搞清构件、运动副、约束、自由度及运动链等重要概念。
2.能绘制比较简单的机械的机构运动简图。
3.能正确计算平面机构的自由度并能判断其是否具有确定的运动。
4.对虚约束对机构工作性能的影响有所认识。
二、本章重点及难点本章的重点是构件、运动副、运动链等的概念,机构运动简图的绘制,机构具有确定运动的条件及机构自由度的计算。
本章的难点是机构中虚约束的判定问题。
三、思考题1.何谓构件?构件与零件有何区别?2.何谓高副?何谓低副?在平面机构中高副和低副一般各带入几个约束?齿轮副的约束数应如何确定?3.何谓运动链?运动链与机构有何联系和区别?4.何谓机构运动简图?它与机构示意图有何区别?绘制机构运动简图的目的和意义是什么?绘制机构运动简图的主要步骤如何?5.何谓机构的自由度?在计算平面机构的自由度时应注意哪些问题?6.什么是虚约束?虚约束对机构有哪些重要影响?7.机构具有确定运动的条件是什么?该条件是在什么前提下获得的?若不满足这一条件,机构将会出现什么情况?四、练习题2-1 试画出图2-1所示泵机构的机构运动简图,并计算其自由度。
2-2 试画出图2-2所示冲压机构的机构运动简图,并判断其是否有确定的相对运动。
2-3 试计算图2-3所示凸轮-连杆组合机构的自由度。
2-4 试确定图2-4所示机构的自由度。
图2-1 图2-2图2-3图2-42-5 图2-5所示为一小型压力机,试绘制其机构运动简图,并计算其自由度。
图2-52-6 试计算图2-6中所示两种压力机的自由度。
图2-62-7 试计算图2-7中所示凸轮-连杆组合机构的自由度。
图2-72-8 试计算图2-8中所示各平面高副机构的自由度。
a) b)图2-13。
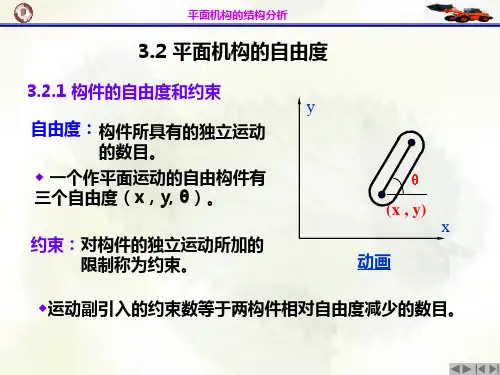
平面机构自由度的计算一、单个自由构件的自由度为 3如所示,作平面运动的刚体在空间的位置需要三个独立的参数〔x ,y, θ〕才能唯一确信。
二、组成运动副构件的自由度图2—19运动副自由度运动副 自由度数 约束数回转副 1〔θ〕 + 2〔x ,y 〕 =3 移动副 1〔x 〕 + 2〔y ,θ〕 =3 高 副 2〔x,θ〕 + 1〔y 〕 =3结论:构件自由度=3-约束数3、平面机构的自由度1〕机构的自由度:机构中活动构件相关于机架所具有的独立运动的数量。
2〕.机构自由度计算公式 H P -=L 2P -3n F式中: n-------活动构件数量〔不包括机架〕 L P -----低副数量〔回转副、移动副〕 H P ------高副数量〔点或线接触的〕例题1: 计算曲柄滑块机构的自由度。
运动副低副(面接触)移动副高副(点或线接触)约束数为2约束数为1解:活动构件数n=3低副数 PL=4 高副数 PH=0H P -=L 2P -3n F 图 曲柄滑块机构=3×3 - 2×4 =1例题2:计算五杆铰链机构的自由度。
解:活动构件数n=4低副数 PL=5 高副数 PH=0H P -=L 2P -3n F 图 五杆铰链机构=3×4 - 2×4 =2例题3: 计算凸轮机构的自由度 解:活动构件数n=2低副数 PL=2 高副数 PH=1H P -=L 2P -3n F=3×2 -2×2-1=1 图 凸轮机构4.机构具有确信运动的条件原动件的数量=机构的自由度数F 〔F >0或F≥1〕。
假设 原动件数<自由度数,机构无确信运动; 原动件数>自由度数,机构在薄弱处损坏。
(a)两个自由度(b)一个自由度(c)0个自由度图3-11 不同自由度机构的运动5. 运算机构自由度时应注意的事项1〕复合铰链:两个以上个构件在同一条轴线上形成的转动副。
由m 个构件组成的复合铰链,共有(m -1)个转动副。
一、机构的组成及其自由度的分析计算(共170题)1.组成机构的要素是和;构件是机构中的单元体。
2.具有、、等三个特征的构件组合体称为机器。
3.机器是由、、所组成的。
4.机器和机构的主要区别在于。
5.从机构结构观点来看,任何机构是由三部分组成。
6.运动副元素是指。
7.构件的自由度是指。
机构的自由度是指。
8.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。
9.机构中的运动副是指。
10.机构具有确定的相对运动条件是原动件数机构的自由度。
11.在平面机构中若引入一个高副将引入___个约束,而引入一个低副将引入____个约束,构件数、约束数与机构自由度的关系是12.平面运动副的最大约束数为,最小约束数为。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。
15.计算机机构自由度的目的是_ ____________ _________________。
16.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
17.计算平面机构自由度的公式为F=,应用此公式时应注意判断:(A)铰链,(B)自由度,(C)约束。
18.机构中的复合铰链是指;局部自由度是指;虚约束是指。
19.划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。
20.机构运动简图是的简单图形。
31.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
--------------( )32.一种相同的机构组成不同的机器。
(A) 可以;(B) 不能33.机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。
(A) 可以;(B)不能34.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由等于。
(A) 0;(B) 1;(C) 235.原动件的自由度应为。
(A) 1;(B) +1;(C) 036.基本杆组的自由度应为。
(A) -1;(B) +1;(C) 0 。
37.高副低代中的虚拟构件及其运动副的自由度应为。
(A) -1;(B) +1;(C) 0 ;(D) 6。
38.在机构中原动件数目机构自由度时,该机构具有确定的运动。
(A) 小于;(B) 等于;(C) 大于。
39.计算机构自由度时,若计入虚约束,则机构自由度就会。
(A) 增多;(B) 减少;(C) 不变。
40.构件运动确定的条件是。
(A) 自由度大于1;(B) 自由度大于零;(C) 自由度等于原动件数。
41.轴2搁置在V形铁1上,根据它们在图示平面内能实现的相对运动,可判别它们之间组成的运动副是。
题41 图题42 图(A) 转动副;(B) 移动副;(C) 纯滚动型平面高副;(D) 滚动兼滑动型平面高副。
43.渐开线齿轮机构的高副低代机构是一铰链四杆机构,在齿轮传动过程中,该四杆机构的。
(A) 两连架杆的长度是变化的(B) 连杆长度是变化的(C) 所有杆件的长度均变化(D) 所有杆件的长度均不变。
44.某齿轮机构,主动齿轮转动方向已在图A标出。
用代副替低后的机构是图所示的机构。
45.将图示凸轮机构进行高副低代,它的正确答案应为。
题45 图46.Ⅱ级组由两个构件和三个低副组成,但图不是二级杆组。
题46 图47.在图示4个分图中,图不是杆组,而是二个杆组的组合。
题 47 图 题 48 图48.在图示4个分图中,图 是Ⅲ级杆组,其余都是个Ⅱ级杆组的组合。
49.构件与零件的含义是否相同?试简述之。
50.机构运动简图与机构示意图有何不同?试简述之。
51.图示为一机构的初拟设计方案。
试: (1〕计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。
(2)如此初拟方案不合理,请修改并用简图表示。
题 51 图 题 52 图52.在图示机构中,若以构件1为主动件,试:(1)计算自由度,说明是否有确定运动。
(2)如要使构件6有确定运动,并作连续转动,则可如何修改?说明修改的要点,并用简图表示。
53.初拟机构运动方案如图所示。
欲将构件1的连续转动转变为构件4的往复移动,试:(1)计算其自由度,分析该设计方案是否合理?(2)如不合理,可如何改进?提出修改措施并用简图表示。
题53 图题54 图54.试画出图示高副机构的低副替代机构。
55.图示4个分图中,图所示构件系统是不能运动的。
题55 图56.计算图示机构的自由度,将高副用低副代替,并选择原动件。
题56 图57.图示为一平底摆动从动件盘型凸轮机构,试画出机构在高副低代后瞬时替代机构。
并计算代换前和代换后的机构自由度。
题57 图题58 图58.什么是杆组?什么是Ⅱ级组?画出5种Ⅱ级组简图。
59.什么是杆组?什么是Ⅲ级组?画出两种Ⅲ级组型式。
60.试画出图示机构的运动简图,并计算其自由度。
对图示机构作出仅含低副的替代机构,进行结构分析并确定机构的级别。
题 60 图 题 61 图61.画出图示机构的运动简图。
62.图中1是偏心安置的圆柱,半径为R ;2是月牙形柱体,其外圆柱半径为R;3与2,2与1的表面由零件外形保证其紧密接触,图示比例尺为mm m l /002.0=μ,试绘出其机构运动简图,并注出构件长度L(长度尺寸从图上量出)。
题 62 图 题 63 图 63.图示机构中偏心盘2和杆3组成何种运动副?弧形滑块4与机架1组成何种运动副?并按图示尺寸画出该机构的运动简图。
其 中2O 为偏心盘的几何中心,1O 为圆弧导轨的圆心。
64.试求图示机构的自由度,并且画出高副低代的机构简图。
题 64 图 题 65 图 65.计算图示机构的自由度,并画出高副低代的机构简图。
66. 画出图示机构简图,并计算该机构的自由度。
构件3为在机器的导轨中作滑移的整体构件,构件2在构件3的导轨中滑移,圆盘1的固定轴位于偏心处。
题66 图题67 图67.对图示机构进行高副低代,并作结构分析,确定机构级别。
点21,PP为在图示位置时,凸轮廓线在接触点处的曲率中心。
68.计算图示机构的自由度,判断是否有确定运动;若不能,试绘出改进后的机构简图。
修改后的原动构件仍为AC杆(图中有箭头的构件)。
D CEA题68 图题69 图69.设以图示机构实现凸轮对滑块E的控制。
(1)该机构能否运动?试作分析说明;(2)若需改进,试画出改进后的机构简图。
70.将图示机构高副低代,拆组,并说明各个杆组的级别及该机构的级别。
图中NN线为齿轮机构节点的公切线。
题70 图题71 图71.对图示机构作出仅含低副的替代机构,进行结构分析并确定机构的级别。
72.对图示机构进行高副低代和结构分析,并确定该机构的级别。
题72 图题73 图73.对图示机构进行高副低代,结构分析,并说明是几级杆组,为几级结构。
74.将图示机构作出仅含低副的替代机构,进行结构分析并确定机构的级别。
题74 图题75 图75.图示机构中,5为滚子,其转轴F固定,试:(1)计算此机构的自由度;(2)当分别以1、4为原动件时,判断该机构的级别(必须画出机构简图并拆组)。
76.试对图示翻台机构:(1)绘出机构简图;(2)计算自由度;(3)进行结构分析。
图中箭头所在构件为原动件。
G4C题76 图题77 图77.图示机构中,构件1为原动件,构件4为运动输出构件,A、B为固定铰链,试:(1)画出该机构的运动简图;(2)计算机构的自由度;(3)判断该机构的级别。
78.试计算图示机构的自由度。
(若有复合铰链、局部自由度或虚约束,必须明确指出。
〕并指出杆组的数目与级别以及机构级别。
LG题78 图题79 图79.计算图示转斗机构的自由度,确定机构的级别。
80.在图示家用缝纫机的送布机构中,由缝纫机传动带驱动等宽凸轮1绕轴线A转动,构件5是送布牙,导杆9可绕轴线J摆动;扳动导杆9,使其处于不同位置,可实现倒、顺方向送布以及调节送布距离(即缝线的针距)。
试将该机构所含高副低代,分析该机构所含基本杆组的级别,并指出机构的级别。
题80 图题81 图81.计算图示机构的自由度,并在图上指出其中的复合铰链、局部自由度和虚约束。
82.计算图示机构的自由度(如有复合铰链、虚约束、局部自由度应指出),并确定原动件数。
题82 图题83 图83.分别计算图A、B所示机构的自由度,如有复合铰链,局部自由度或虚约束,必须指明。
84.试计算图示机构的自由度,若有复合铰链、局部自由度、虚约束,必须注明。
题84 图题85 图85.计算图示机构的自由度,若有复合铰链、局部自由度或虚约束,需明确指出。
86.试计算图示机构的自由度。
题86 图题87 图87.计算图示机构自由度,如有复合铰链、局部自由度、虚约束,需明确指出。
88.试计算图示机构自由度,如有复合铰链、虚约束、局部自由度,需明确指出。
并指出需要几个原动件才有确定运动?E题88 图题89 图89.试计算图示机构的自由度,并说明需几个原动件才有确定运动。
图中,||,||||,==AB||LMEFIJHIGFBDKLBC90.试计算图示机构的自由度,如有复合铰链、局部自由度、虚约束,需明确指出。
题90 图题91 图91.试计算图示机构的自由度。
如有复合铰链,局部自由度和虚约束,需明确指出。
92.试计算图示机构的自由度。
题92 图题93 图93.试计算图示机构的自由度,并确定原动件的数目。
95.试计算图示机构的自由度,并说明需几个原动件才有确定运动。
题95 图题96 图96.试计算图示平面机构的自由度,并说明需几个原动件才有确定运动。
97.计算图示机构的自由度。
如有复合铰链、局部自由度、虚约束应注明。
若取图中绘有箭头的构件为原动件,问运动是否确定?题97 图题98 图98.试计算图示机构的自由度。
99.试计算图示机构的自由度,并说明需几个原动件才有确定运动。
题99 图题100 图100.计算图示机构的自由度。
101.试计算图示机构的自由度,并说明需几个原动件才有确定运动。
题101 图题102 图102.试确定图示插齿机的自由度。
103.计算图示构件系统的自由度,并判断是否具有确定运动?题103 图题104 图104.求图示机构的自由度,如有复合铰链、局部自由度和虚约束,需明确指出。
图中CDFE 和EFGH均成平行四边形。
105.试计算图示机构的自由度,若有复合铰链、局部自由度、虚约束,必需注明。
题105 图题106 图题107 图106.计算图示机构的自由度。
若有复合铰链,局部自由度,虚约束,须明确注明。
107.试计算图示机构自由度、如有复合铰链、虚约束或局部自由度,需说明在何处,以及需几个原动件才具有确定运动?108.计算图示机构的自由度。
如有复合铰链、局部自由度和虚约束,应指出。
A B CDE F题 108 图 题 109 图 题 110 图109.试计算图示机构的自由度,并说明G 点的运动是否确定。