奈奎斯特判据
- 格式:pdf
- 大小:331.86 KB
- 文档页数:8
奈奎斯特稳定判据及应用奈奎斯特稳定判据是一种用于分析线性时不变系统稳定性的常用方法。
该方法的基本思想是通过对系统的频率响应进行分析,判断系统的稳定性。
下面我将详细介绍奈奎斯特稳定判据及其应用。
奈奎斯特稳定判据是由德国数学家埃尔温·奈奎斯特(Ernst Siegfried H Stabilization)在20世纪20年代提出的。
该判据基于系统的开环频率响应曲线和频率扰动的关系,通过分析系统的极点和奈奎斯特曲线的特性来判断系统的稳定性。
在分析一个系统的稳定性时,首先需要了解系统的传递函数。
传递函数是描述系统输入和输出之间关系的数学模型,通常表示为H(s),其中s是复频率。
传递函数中的极点(也称为极值)是指使传递函数无穷大的复频率值。
对于线性时不变系统,只有当所有的极点都位于s平面的左半平面时,系统才是稳定的。
根据奈奎斯特稳定判据,一个线性时不变系统是稳定的,当且仅当奈奎斯特曲线上的点环绕虚轴的次数等于系统极点位于虚轴右侧的个数。
这可以通过两个主要步骤来实现。
首先,我们需要绘制系统的开环频率响应曲线。
开环频率响应曲线是指系统传递函数H(s)的模量和幅角随频率变化的曲线。
我们可以通过画出传递函数的特定频率响应曲线来获得。
其次,我们需要绘制奈奎斯特曲线。
奈奎斯特曲线是通过将开环频率响应曲线绕过s 轴上方的点连接而得到的曲线。
具体来说,奈奎斯特曲线的性质如下:- 如果系统的开环频率响应曲线没有通过-1+j0(虚轴上的-1点),则奈奎斯特曲线将通过-1+j0;- 如果系统的开环频率响应曲线通过-1+j0,但未环绕虚轴上的任何点,则奈奎斯特曲线将通过-1+j0;- 如果系统开环频率响应曲线经过-1+j0,并绕过了虚轴上的n 个点,则奈奎斯特曲线将通过-1+j0并绕过虚轴上的n 个点。
通过绘制奈奎斯特曲线,我们可以根据它的形状和特性判断系统的稳定性。
奈奎斯特稳定判据的应用广泛,尤其在控制系统设计和分析方面。
奈奎斯特稳定判据例题在控制系统的设计和分析中,奈奎斯特稳定判据是一种常用的方法,用于评估系统的稳定性。
本文将介绍奈奎斯特稳定判据,并通过一个例题对其应用进行说明。
例题描述:考虑一个开环传递函数为G(s)的控制系统,其中G(s)为一个二阶系统:G(s) = K / (s^2 + as + b)其中,K为增益,a和b为常数。
我们需要利用奈奎斯特稳定判据来评估系统在不同参数取值下的稳定性。
奈奎斯特稳定判据的原理是通过绘制开环传递函数的奈奎斯特曲线(Nyquist Curve),利用曲线的形状和特征来判断系统的稳定性。
根据奈奎斯特稳定判据,当开环传递函数的奈奎斯特曲线与-1的实轴交点个数为零时,系统是稳定的;当交点个数为一时,系统是临界稳定的;当交点个数为二时,系统是不稳定的。
解答过程:1. 计算开环传递函数的奈奎斯特曲线:首先,我们将二阶开环传递函数G(s)进行极坐标分解,得到:G(s) = |G(ω)| * e^(j*θ(ω))其中,|G(ω)|为幅值,θ(ω)为相位,ω为频率。
然后,我们根据极坐标的特点,将频率从0到∞进行变化,对于每个频率ω,计算幅值和相位。
根据计算所得的幅值和相位,我们可以绘制奈奎斯特曲线。
2. 分析奈奎斯特曲线:绘制完奈奎斯特曲线后,我们可以通过以下步骤来分析曲线并判断系统的稳定性:- 统计曲线与-1的实轴交点个数;- 若交点个数为零,则系统是稳定的;- 若交点个数为一,系统是临界稳定的;- 若交点个数为二,系统是不稳定的。
通过这样的分析,我们可以对给定的控制系统,利用奈奎斯特稳定判据来评估其稳定性。
3. 例题求解:下面,我们将通过具体数值来求解例题中的控制系统的稳定性。
假设题目给定的参数为:K = 5,a = 1,b = 6。
首先,根据给定的参数计算开环传递函数:G(s) = 5 / (s^2 + s + 6)然后,我们计算奈奎斯特曲线,并根据曲线与-1的实轴交点个数来判断系统的稳定性。

广义奈奎斯特判据
摘要:
1.奈奎斯特定理的概述
2.广义奈奎斯特判据的定义
3.广义奈奎斯特判据的应用
4.总结
正文:
1.奈奎斯特定理的概述
奈奎斯特定理,又称奈奎斯特采样定理,是信号处理领域的一个重要定理。
它指出,在采样频率大于信号频率的两倍的情况下,可以从离散的采样数据中完整地重构出原始的连续信号。
这一定理为数字信号处理提供了理论依据,使得信号可以从模拟领域转换到数字领域进行处理。
2.广义奈奎斯特判据的定义
广义奈奎斯特判据是奈奎斯特定理的推广。
它不仅适用于连续信号,还适用于离散信号和非周期信号。
广义奈奎斯特判据指出,如果采样频率大于信号频率的最高频率的两倍,那么从离散的采样数据中就可以完整地重构出原始的信号。
3.广义奈奎斯特判据的应用
广义奈奎斯特判据在信号处理中有广泛的应用,例如在音频处理、图像处理、通信系统等领域。
在音频处理中,广义奈奎斯特判据可以用来确定音频信号的采样频率,以保证音频信号的质量。
在图像处理中,广义奈奎斯特判据可
以用来确定图像的采样频率,以保证图像的质量。
在通信系统中,广义奈奎斯特判据可以用来确定信号的传输速率,以保证信号的准确传输。
4.总结
广义奈奎斯特判据是信号处理领域的一个重要定理,它为数字信号处理提供了理论依据。

广义奈奎斯特判据摘要:1.广义奈奎斯特判据的定义和作用2.广义奈奎斯特判据的应用场景3.广义奈奎斯特判据在实际工程中的应用4.广义奈奎斯特判据的局限性及其改进方法5.总结正文:广义奈奎斯特判据是一种在数字信号处理和通信系统中广泛应用的原理,用于判断一个系统是否能够实现无失真传输。
它主要通过分析系统的采样频率和信号频率之间的关系,从而为信号的采样和传输提供理论依据。
广义奈奎斯特判据的核心思想是,当采样频率大于信号频率的两倍时,就可以实现信号的无失真传输。
这一原理在数字信号处理领域具有重要意义,为数字音频、图像和视频的处理和传输提供了理论基础。
在实际应用中,广义奈奎斯特判据帮助我们设计出高效可靠的数字通信系统,确保信号在传输过程中的质量。
然而,在实际工程中,广义奈奎斯特判据并非万能。
有时,尽管满足了奈奎斯特采样定理,但在传输过程中仍然会出现失真。
这是因为在实际系统中,除了采样频率和信号频率之间的关系外,还存在其他因素影响信号的传输质量。
为了解决这个问题,研究人员对广义奈奎斯特判据进行了改进,提出了更符合实际应用的判据方法。
尽管广义奈奎斯特判据在数字信号处理和通信领域具有广泛的应用,但它仍然存在一定的局限性。
首先,广义奈奎斯特判据主要关注的是采样频率和信号频率之间的关系,而对于其他影响信号传输质量的因素,如系统的带宽、噪声等,并没有给予足够的重视。
其次,广义奈奎斯特判据是一种理想化的理论模型,在实际应用中,系统的性能往往受到多种因素的影响,很难完全满足这一判据。
为了解决这些问题,研究人员在广义奈奎斯特判据的基础上,提出了更加完善的判据方法。
这些方法不仅考虑了采样频率和信号频率之间的关系,还将其他影响因素纳入了考虑范围,使得判据更加符合实际应用需求。
总之,广义奈奎斯特判据是数字信号处理和通信领域的重要原理,它在实际工程中具有广泛的应用。
然而,由于其局限性,我们需要在实际应用中不断地对其进行改进,以提高判据的实用性和准确性。
奈奎斯特稳定判据例题奈奎斯特稳定判据是用于判断线性时不变系统的稳定性的一种方法。
它基于系统的开环传递函数,通过绘制奈奎斯特曲线来分析系统的稳定性。
下面我将给出一个奈奎斯特稳定判据的例题,并从多个角度进行详细解答。
例题,考虑一个开环传递函数 G(s) = (s+1)/(s^2+2s+2) ,判断该系统的稳定性。
解答:1. 奈奎斯特曲线的绘制:首先,我们需要将开环传递函数 G(s) 转化为极坐标形式。
对于 G(s) = (s+1)/(s^2+2s+2) ,我们可以将其写成G(jω) =(jω+1)/((jω)^2+2(jω)+2) 的形式,其中 j 是虚数单位,ω 是频率。
然后,我们可以根据频率范围来绘制奈奎斯特曲线。
通常,我们会从频率为零开始,逐渐增加频率到无穷大。
在每个频率点上,计算G(jω) 的幅度和相位,并将它们绘制在复平面上。
最后,我们得到奈奎斯特曲线。
2. 奈奎斯特曲线的判据:奈奎斯特稳定判据基于奈奎斯特曲线的形状来判断系统的稳定性。
根据奈奎斯特曲线的特点,我们可以得出以下结论:如果奈奎斯特曲线不经过虚轴右半平面的任何点,那么系统是稳定的。
如果奈奎斯特曲线经过虚轴右半平面的点的个数与闭环极点的个数相等,且没有穿过虚轴,那么系统是边界稳定的。
如果奈奎斯特曲线经过虚轴右半平面的点的个数多于闭环极点的个数,那么系统是不稳定的。
3. 应用奈奎斯特稳定判据:对于给定的例题 G(s) = (s+1)/(s^2+2s+2) ,我们可以根据上述奈奎斯特曲线的判据来判断系统的稳定性。
首先,我们需要绘制奈奎斯特曲线。
根据开环传递函数 G(s)的极点,我们可以得知该系统的极点为 -1+j 和 -1-j 。
因此,奈奎斯特曲线应该经过虚轴右半平面的两个点。
然后,我们可以根据奈奎斯特曲线的形状来判断系统的稳定性。
如果奈奎斯特曲线没有穿过虚轴,那么系统是稳定的。
如果奈奎斯特曲线穿过虚轴,那么系统是不稳定的。
绘制奈奎斯特曲线后,我们发现奈奎斯特曲线没有穿过虚轴,而是经过虚轴右半平面的两个点。
奈奎斯特稳定判据中,逆时针圈数的求法奈奎斯特稳定判据(Nyquist stability criterion)是判断线性时不变系统稳定性的一种方法。
在这个判据中,我们需要计算系统的频率响应曲线,并通过判断曲线的环绕圈数来确定系统的稳定性。
首先,我们需要了解频率响应和相频曲线的概念。
频率响应是描述系统输入输出关系的一种性质,它是系统在各个频率下的增益和相位延迟的函数。
频率响应通常用复数形式表示,可以分别表示为幅频特性和相频特性。
相频曲线是频率响应曲线的一部分,用于描述系统的相位延迟随频率变化的情况。
相频曲线通常以频率为横轴,相位角为纵轴绘制。
奈奎斯特稳定判据利用了系统的相频曲线的特性来判断系统的稳定性。
具体而言,我们需要计算曲线是否有环绕原点的闭合轨迹,环绕的圈数代表系统的极点在单位圆内的个数。
若系统的极点全部位于单位圆内,则系统是稳定的。
接下来,让我们详细介绍逆时针圈数的求法。
步骤1:绘制频率响应曲线首先,我们需要通过给定系统的传递函数或差分方程来计算频率响应曲线。
这可以通过将输入信号表示为复指数信号,然后将其代入系统的传递函数或差分方程中,最后得到输出信号的幅频特性和相频特性。
步骤2:计算误差点数误差点数的计算是判断系统稳定性的关键步骤之一。
误差点数表示相频曲线与负实轴(或虚轴)的交点个数。
通常,我们只关注负实轴上的交点。
我们可以通过以下步骤计算误差点数:-绘制连续频率响应曲线:将频率的取值范围划分为无穷小的频率间隔,然后通过计算系统传递函数在每个频率点上的相位角来绘制连续的相频曲线。
-绘制离散频率响应曲线:离散频率响应曲线由离散频率点上的相位角组成。
我们可以通过对连续频率曲线上的相位角进行采样,或者直接利用系统的离散传递函数计算离散频率曲线上的相位角。
步骤3:计算逆时针圈数逆时针圈数表示相频曲线围绕负实轴(或虚轴)的闭合轨迹的圈数。
它可正可负,取决于曲线绕原点的方向。
要计算逆时针圈数,我们需要找到相频曲线与负实轴(或虚轴)的所有交点,并注意计算圈数时每个交点绕原点的方向。
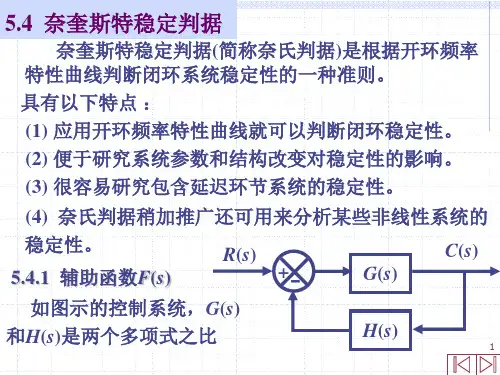
5.4 频域稳定判据5.4.1 奈奎斯特稳定判据闭环控制系统稳定的充要条件是:闭环特征方程的根均具有负的实部,或者说,全部闭环极点都位于左半s 平面。
第3章中介绍的劳斯稳定判据,是利用闭环特征方程的系数来判断闭环系统的稳定性。
这里要介绍的频域稳定判据则是利用系统的开环频率特性)(ωj G 来判断闭环系统的稳定性。
频域稳定判据是奈奎斯特于1932年提出的,它是频率分析法的重要内容。
利用奈奎斯特稳定判据,不但可以判断系统是否稳定(绝对稳定性),也可以确定系统的稳定程度(相对稳定性),还可以用于分析系统的动态性能以及指出改善系统性能指标的途径。
因此,奈奎斯特稳定判据是一种重要而实用的稳定性判据,工程上应用十分广泛。
1.辅助函数对于图5-33所示的控制系统结构图,其开环传递函数为)()()()()(0s N s M s H s G s G == (5-59)相应的闭环传递函数为 )()()()()(1)()(1)()(000s M s N s G s N s N s G s G s G s +=+=+=Φ (5-60) 式中,为开环传递函数的分子多项式,阶;为开环传递函数的分母多项式,阶,。
由式(5-59)、式(5-60)可见,)(s M m )(s N n m n ≥)()(s M s N +和分别为闭环和开环特征多项式。
现以两者之比构成辅助函数)(s N ()()()1()()M s N s F s G s N s +==+ (5-61) 实际系统传递函数分母阶数n 总是大于或等于分子阶数,因此辅助函数的分子、分母同阶,即其零点数与极点数相等。
设)(s G m 1z −,2z −,…,n z −和1p −,,…,分别为其零、极点,则辅助函数可表示为2p −n p −)(F s )())(()())(()(2121n n p s p s p s z s z s z s s F ++++++=L L(5-62)综上所述可知,辅助函数具有以下特点:)(s F (1)辅助函数是闭环特征多项式与开环特征多项式之比,其零点和极点分别为闭环极点和开环极点。
)(s F (2)的零点和极点的个数相同,均为个。
)(s F n (3)与开环传递函数之间只差常量1。
)(s F )(s G )(1)(s G s F +=的几何意义为:F 平面上的坐标原点就是G 平面上的(0,1j −)点,如图5-34所示。
2.幅角定理辅助函数是复变量的单值有理复变函数。
由复变函数理论可知,如果函数在平面上指定域内是非奇异的,那么对于此区域内的任一点d ,都可通过的映射关系在平面上找到一个相应的点 (称为d 的像);对于平面上的任意一条不通过任何奇异点的封闭曲线)(s F s )(s F s )(s F )(s F 'd 'd s )(s F Γ,也可通过映射关系在平面(以下称)(s F Γ平面)找到一条与它相对应的封闭曲线 (称为的像),如图5-35所示。
'Γ'ΓΓ图5-35 平面与平面的映射关系s F 设平面上不通过任何奇异点的某条封闭曲线s )(s F Γ,它包围了在平面上的)(s F s Z 个零点和P 个极点。
当以顺时针方向沿封闭曲线s Γ移动一周时,则在平面上相对应于封闭曲线的像将以顺时针的方向围绕原点旋转F Γ'ΓR 圈。
R 与Z 、的关系为P P Z R −= (5-63)3.奈奎斯特稳定判据为了确定辅助函数位于右半平面内的所有零、极点数,现将封闭曲线扩展为整个右半平面。
为此,设计)(s F s Γs Γ曲线由以下3段所组成:ⅰ– 正虚轴ωj s =:频率ω由0变到∞;ⅱ–半径为无限大的右半圆:θj e R s =∞→R ,θ由2π变化到2π−;ⅲ– 负虚轴ωj s =:频率ω由∞−变化到0。
这样,3段组成的封闭曲线(称为奈奎斯特路径,简称奈氏路径)就包含了整个右半平面,如图5-36所示。
Γs 图5-36 奈奎斯特路径在平面上绘制与F Γ相对应的像'Γ:当沿虚轴变化时,由式(5-61)则有s )(1)(ωωj G j F += (5-64)式中,)(ωj G 为系统的开环频率特性。
因而将由下面几段组成:'Γ ⅰ– 和正虚轴对应的是辅助函数的频率特性)(ωj F ,相当于把)(ωj G 右移一个单位;ⅱ–和半径为无穷大的右半圆相对应的辅助函数。
由于开环传递函数的分母阶数高于分子阶数,当时,,故有1)(→s F ∞→s 0)(→s G 1)(1)(→+=s G s F ;ⅲ–和负虚轴相对应的是辅助函数频率特性)(ωj F 对称于实轴的镜像。
图5-37绘出了系统开环频率特性曲线)(ωj G 。
将曲线右移一个单位,并取镜像,则成为平面上的封闭曲线F 'Γ如图5-38所示。
图中用虚线表示镜像。
对于包含了整个右半平面的奈氏路径来说,式(5-63)中的s Z 和P 分别为闭环传递函数和开环传递函数在右半平面上的极点数,而s R 则是平面上F 'Γ曲线顺时针包围原点的圈数,也就是平面上系统开环幅相特性曲线及其镜像顺时针包围(G 0,1j −)点的圈数。
在实际系统分析过程中,我们一般只绘制开环幅相特性曲线不绘制其镜像曲线,考虑到角度定义的方向性,有N R 2−= (5-65) 其中,是开环幅相特性曲线N )(ωj G (不包括其镜像)包围G 平面(0,1j −)点的圈数(逆时针为正,顺时针为负)。
将式(5-65)代入式(5-63),可得奈奎斯特判据(简称奈氏判据):N P Z 2−= (5-66)式中,Z 是右半平面中闭环极点的个数,是右半平面中开环极点的个数,是G 平面上s P s N )(ωj G 包围(0,1j −)点的圈数(逆时针为正)。
显然,只有当时,闭环系统才是稳定的。
2=−=N P Z .图5-37 )(ωj G 特性曲线 图5-38 平面上的封闭曲线F 例5-9 设系统开环传递函数为)52)(2(52)(2+++=s s s s G试用奈氏判据判定闭环系统的稳定性。
图5-39幅相特性曲线及其镜像解 绘出系统的开环幅相特性曲线如图5-39所示。
当0=ω时,曲线起点在实轴上2.5)0(=j G 。
当∞→ω时,终点在原点。
当5.2=ω时曲线和负虚轴相交,交点为。
当06.5j −3=ω时,曲线和负实轴相交,交点为0.2−。
见图5-39中实线部分。
在右半平面上,系统的开环极点数为0。
开环频率特性s )(ωj G 随着ω从变化到0∞+时,顺时针方向围绕点()一圈,即0,1j −1−=N 。
用式(5-66)可求得闭环系统在右半平面的极点数为 s 2)1(202=−×−=−=N P Z所以闭环系统不稳定。
利用奈氏判据还可以讨论开环增益K 对闭环系统稳定性的影响。
当K 值变化时,幅频特性成比例变化,而相频特性不受影响。
因此,就图5-39而论,当频率3=ω时,曲线与负实轴正好相交在(0,2j −)点,若K 缩小一半,取6.2=K 时,曲线恰好通过点(),这是临界稳定状态;当时,幅相特性曲线0,1j −6.2<K )(ωj G 将从点(0,1j −)的右方穿过负实轴,不再包围点(),这时闭环系统是稳定的。
0,1j −例5-10 系统结构图如图5-40所示,试判断系统的稳定性并讨论K 值对系统稳定性的影响。
图5-40 例5-10系统结构图 图5-41 1>K和1<K 时的幅相特性曲线 解 系统是一个非最小相角系统,开环不稳定。
开环传递函数在右半平面上有一个极点, s 1=P 。
幅相特性曲线如图5-41所示。
当0=ω时,曲线从负实轴点()出发;当0,j K −∞→ω时,曲线以趋于坐标原点;幅相特性包围点(o 90−0,1j −)的圈数与N K 值有关。
图5-41绘出了1>K 和1<K 的两条曲线,可见:当1>K 时,曲线逆时针包围了点(0,1j −)的21圈,即21=N ,此时0)21(212=×−=−=N P Z ,故闭环系统稳定;当1<K 时,曲线不包围点(),即,此时0,1j −0=N 10212=×−=−=N P Z ,有一个闭环极点在右半平面,故系统不稳定。
s 5.4.2 奈奎斯特稳定判据的应用如果开环传递函数在虚轴上有极点,则不能直接应用图5-36所示的奈氏路径,因为幅角定理要求奈氏轨线不能经过的奇点,为了在这种情况下应用奈氏判据,可以对奈氏路径略作修改。
使其沿着半径为无穷小()的右半圆绕过虚轴上的极点。
例如,当开环传递函数中有纯积分环节时,s平面原点有极点,相应的奈氏路径可以修改如图5-42所示。
图中的小半圆绕过了位于坐标原点的极点,使奈氏路径避开了极点,又包围了整个右半平面,前述的奈氏判据结论仍然适用,只是在画幅相特性曲线时,s 取值需要先从绕半径无限小的圆弧逆时针转到,然后再沿虚轴到)(s G )(s F 0→r s 0j o 90+0j ∞j 。
这样需要补充小圆弧所对应的+→=00j j s )(ωj G 特性曲线。
图5-42 开环含有积分 环节时的奈氏路径设系统开环传递函数为 11(1()(1m i i n v v j j K s G s s T s τ=−=))+=+∏∏ 式中,v 为系统型别。
当沿着无穷小半圆逆时针方向移动时,有0lim jv r s re θ→=,映射到G 平面的曲线可以按下式求得001lim 01lim (1)()lim (1)j r j r m i jv jv i n v vs re r v j j s re K s K G s e e r s T s θθθθτ→→−=−=→==+==+∏∏−=∞ (5-67) 由上述分析可见,当沿小半圆从s 0=ω变化到时,+=0ωθ角沿逆时针方向从0变化到2π,这时G 平面上的映射曲线将从)0(j G ∠位置沿半径无穷大的圆弧按顺时针方向转过2v π−角度。
在确定)(ωj G 绕点)01(j ,−圈数的值时,要考虑大圆弧的影响。
N 例5-11 已知开环传递函数为)1()(+=Ts s K s G 其中,T ,绘制奈氏图并判别系统的稳定性。
0>K 0>解 该系统在坐标原点处有一个极点,为Ⅰ型系统。
取奈氏路径如图5-42所示。
当沿小半圆移动从)(s G s 0=ω变化到时,在平面上映射曲线为半径的+=0ωG ∞→R 2π圆弧。
幅相特性曲线(包括大圆弧)如图5-43所示。
此系统开环传递函数在右半平面无极点,;的奈氏曲线又不包围点(s 0=P )(s G 0,1j −),0=N ;因此02=−=N P Z ,闭环系统是稳定的。
图5-43 例5-11的奈氏图 图5-44 例5-12的奈氏图例5-12 已知系统开环传递函数为)1()3()()(−+=s s s K s H s G 试绘制奈氏图,并分析闭环系统的稳定性。