系统的稳定性nyquist判据以及bode判据
- 格式:ppt
- 大小:1.26 MB
- 文档页数:44
用Nyquist判据判断系统稳定性Nyquist判据是一种经典的判断系统稳定性的方法,被广泛应用于控制工程和通信工程中。
该方法通过绘制系统的Nyquist图,判断系统的极点和零点在复平面上所处的位置,从而判断系统的稳定性。
本文将介绍Nyquist判据的基本原理、具体操作步骤以及注意事项,以帮助读者更好地理解和应用这一方法。
一、Nyquist判据的基本原理在控制系统中,我们通常将系统的传递函数写成如下形式:G(s) = N(s) / D(s)其中,N(s)和D(s)分别为系统的分子和分母多项式,s为复变量。
我们知道,当系统传递函数G(s)的阶数为n时,该函数在复平面上有n个极点和/或零点。
Nyquist判据的基本思想是:绘制系统的Nyquist图,即将系统的G(s)函数沿着复平面上的一个可变的圈线进行连续变形,并记录圈线变形前和变形后所经过的原点和极点个数及情况。
通过比较圈线变形前后绕圆点的圈数,就可以判断系统的稳定性。
具体地说,Nyquist判据有以下两个重要的结论:1.当系统的Nyquist图绕复平面上的所有极点时,如果围绕极点的圈数全都是负数,则该系统是稳定的;相反,如果存在围绕极点的圈数为正数,则该系统是不稳定的。
这两个结论形象地表现了系统稳定性与Nyquist图绕复平面上点的情况之间的关系,为我们判断系统稳定性提供了有力的理论支持。
在具体应用Nyquist判据时,我们可以按照以下步骤进行:1.绘制系统的G(s)函数的Nyquist图。
2.确定系统的极点和零点在复平面上的位置,并标记在Nyquist图中。
3.确定绘制Nyquist图时的路径,通常采用右半平面或左半平面的路径。
对于一些特殊系统,比如共轭复极点或共轭复零点,我们需要构造一些特殊路径。
4.通过沿着路径将Nyquist图绘制出来,并标记绕圆点的圈数。
一般情况下,我们可以按照路径的方向来计算围绕圆点的圈数。
5.根据Nyquist图绕极点和零点的情况,结合Nyquist判据的两个结论,判断系统的稳定性。

Chp.5系统稳定性基本要求1.了解系统稳定性的定义、系统稳定的条件;2.掌握Routh判据的必要条件和充要条件,学会应用Routh判据判定系统是否稳定,对于不稳定系统,能够指出系统包含不稳定的特征根的个数;3.掌握Nyquist 判据;4.理解Nyquist 图和Bode 图之间的关系;5.掌握Bode 判据;6.理解系统相对稳定性的概念,会求相位裕度和幅值裕度,并能够在Nyquist 图和Bode 图上加以表示。
重点与难点本章重点1.Routh 判据、Nyquist 判据和Bode 判据的应用;2.系统相对稳定性;相位裕度和幅值裕度求法及其在Nyquist图和Bode 图的表示法。
本章难点Nyquist 判据及其应用。
§1 概念示例:振摆1、稳定性定义:若系统在初始条件影响下,其过渡过程随时间的推移逐渐衰减并趋于0,则系统稳定;反之,系统过渡过程随时间的推移而发散,则系统不稳定。
(图5.1.2)讨论:①线性系统稳定性只取决于系统内部结构和参数,是一种自身恢复能力。
与输入量种类、性质无关。
②系统不稳定必伴有反馈作用。
(图5.1.3)若x0(t)收敛,系统稳定;若x0(t)发散,则系统不稳定。
将X0(s)反馈到输入端,若反馈削弱E(s) →稳定若反馈加强E(s) →不稳定③稳定性是自由振荡下的定义。
即x i(t)=0时,仅存在x i(0-)或x i(0+)在x i(t)作用下的强迫运动而系统是否稳定不属于讨论范围。
2、系统稳定的条件:对[a n p n+a n-1p n-1+…a1p+a0]x0(t)=[b m p m+b m-1p m-1+…b1p+b0]x i(t)令B(s)= a n p n+a n-1p n-1+…a1p+a0 A(s)= b m p m+b m-1p m-1+…b1p+b0初始条件:B0(s) A0(s)则B(s)X0(s)- B0(s)= A(s)X i(s)- B0(s)X i(s)=0,由初始条件引起的输出:L-1变换根据稳定性定义,若系统稳定须满足,即z i为负值。
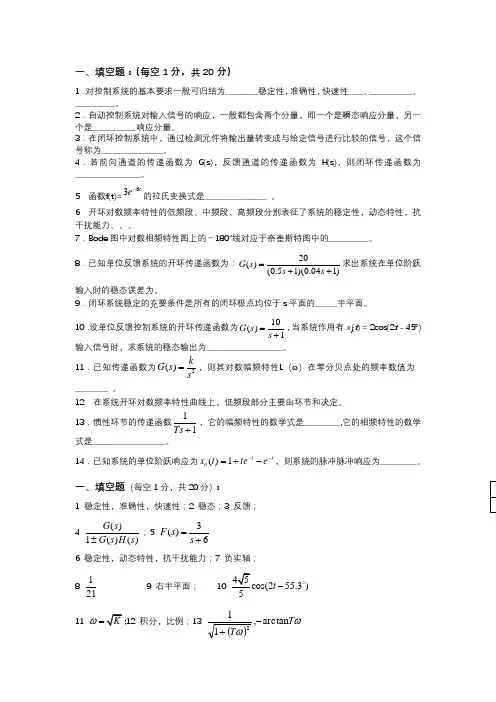
1.对控制系统的基本要求一般可归结为_________稳定性,准确性,快速性____、____________、___________。
2.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是____________响应分量。
3.在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_________________。
4.若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为__________________。
5 函数f(t)=的拉氏变换式是_________________ 。
6 开环对数频率特性的低频段﹑中频段﹑高频段分别表征了系统的稳定性,动态特性,抗干扰能力﹑﹑。
7.Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的___________。
8.已知单位反馈系统的开环传递函数为:20()(0.51)(0.041)G s s s =++求出系统在单位阶跃输入时的稳态误差为。
9.闭环系统稳定的充要条件是所有的闭环极点均位于s 平面的______半平面。
10.设单位反馈控制系统的开环传递函数为10()1G s s =+,当系统作用有x i (t ) = 2cos(2t - 45︒)输入信号时,求系统的稳态输出为_____________________。
11.已知传递函数为2()kG s s=,则其对数幅频特性L (ω)在零分贝点处的频率数值为_________ 。
12 在系统开环对数频率特性曲线上,低频段部分主要由环节和决定。
13.惯性环节的传递函数11+Ts ,它的幅频特性的数学式是__________,它的相频特性的数学式是____________________。
14.已知系统的单位阶跃响应为()1t to x t te e --=+-,则系统的脉冲脉冲响应为__________。
常用的频域稳定判据
频域稳定判据是用来判断线性时不变系统在频域中是否稳定的方法。
常用的频域稳定判据有以下几种:
1. Nyquist判据:对于开环传递函数G(s),判断闭环系统是否稳定的方法是通过绘制Nyquist曲线。
当Nyquist曲线不经过点(-1,0)时,系统稳定;当Nyquist曲线经过点(-1,0)时,系统不稳定。
2. Bode判据:对于开环传递函数G(s),通过绘制Bode图来判断系统稳定性。
Bode图是将传递函数G(s)的振幅与相位分别绘制在对数频率和对数振幅的坐标系上。
在Bode图中,当相位曲线超过-180°时,系统不稳定。
3. Nyquist稳定判据:对于开环传递函数G(s),通过计算开环传递函数G(s)的极点和零点,可以使用Nyquist稳定判据来判断系统稳定性。
Nyquist稳定判据是通过计算开环传递函数的闭合轨迹绕点(-1,0)的圈数来判断系统稳定性。
若闭合轨迹绕点(-1,0)的圈数等于开环传递函数G(s)的极点个数减去零点个数,则系统稳定。
4. Routh-Hurwitz判据:对于开环传递函数G(s),通过构造Routh-Hurwitz矩阵来判断系统稳定性。
Routh-Hurwitz矩阵是由开环传递函数的特征多项式构成的矩阵,通过判断所有主元的符号是否为正来确定系统的稳定性。
若所有主元的符号都为正,则系统稳定。
这些是常用的频域稳定判据,可以根据具体情况选择适合的方法来判断系统稳定性。