利用死点: ①夹紧机构 图 ②飞机起落架 图
第三节 四杆机构的设计
一、四杆机构的设计的基本问题
平面连杆机构的功能:
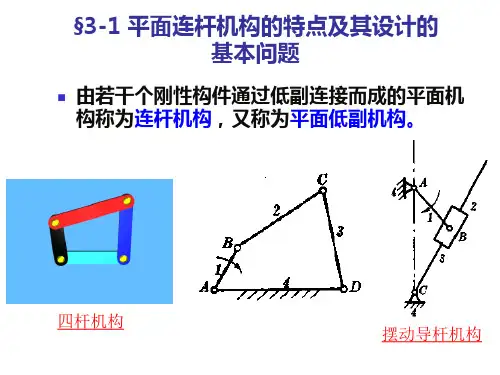
(1)传动功能 图
(2)引导功能
图
四杆机构的设计的基本问题:
(1)实现预定的连杆位置问题; (1)实现已知运动规律问题; (2)实现已知轨迹问题。
设计方法:(1)图解法;(2)解析法;
ψ
θ
a AC2 AC1 2
a EC1 / 2
90 -θ
ψ
θ
θ
(2)曲柄滑块机构
已知: H , K,e ,求机构其它构件尺寸.
步骤:
180 (k
1)
k 1
取 l 作图
AB=(AC1-AC2)/2 BC=AC1-AB
H
c2
c1
90
A
lAB l AB
O
Hale Waihona Puke lBC l BCM
(3)导杆机构
已知: lAD , K
根据 3 ,则得
2
arcsin
l3
sin
3 l1 sin
l2
1
第四节 平面连杆机构的运动分析(8)
2.速度分析
将式(l1ei1 l2ei2 l4 l3ei3 对时间求导,得到
l ie 指数函数求导
i1
11
l22iei2
l33iei3
e 将式中的每项乘 i2,并取实部消去 2 ,解得:
3)以平面高副联接的两构件, 若高副元素之间为纯 滚动时, 接触点即为两构件的瞬心;若高副元素 之间既滚动又滑动, 则瞬心在高副接触点处的公 法线上。 图
(2)不直接相联的两构件的瞬心——三心定理
三心定理: 三个彼此作平面运动的构件共有三个瞬 心,且必定位于同一直线上。 图