机械原理第三章作业答案
- 格式:ppt
- 大小:1.15 MB
- 文档页数:15
第3章课后习题参考答案3—1何谓速度瞬心相对瞬心与绝对瞬心有何异同点答:参考教材30^31页。
3—2何谓三心定理何种情况下的瞬心需用三心定理来确定答:参考教材31页。
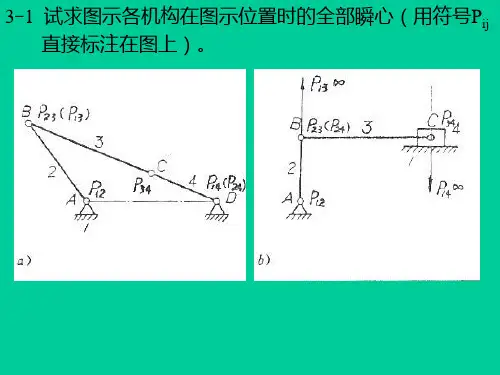
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a)答:3-4标出图示的齿轮一连杆纽合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比U)l/U)3o答:1)瞬新的数目:K 二N (N-1 )/2=6 (6T )/2=152)为求3(/33需求3个瞬心%、P%、P 竹的位置由构件J 3在K 点的速度方向相同,可知4与3同向。
3-6 在图示的四杆机构中,L AB 二60mm, LcD=90mm, L AD =L BC = 120mm, u)2=10rad/s,试用瞬心法求:1) 当 0=165°2) 当 0=165°2)求vc 定出瞬心"2的位置(图b) 因M 为构件3的绝对瞬心,则有 U )3=VB /IB PI 3=W2I JB / U=10X X78=(rad/s) v c = u c pi3U)a=X52X = (m/s)(2分)时,点的速度vc;吋,构件3的BC 线上速度最小的一点E 的位置及速度的大小:3i/3s= PadPu/PidPi^DK/AK(图b)C线上速度灵小的点必与p13点的距离3—11速度多边形和加速度多边彤有哪些特性试标出图中的方向。
答速度多边形和加速慶多边形特性参见下图,各速度方向在图中用箭头标出。
3T2在图示的机构中,设已知构件的尺寸及原动件1的角速度(顺时针),试用图解法求机构在图示位置吋C点的速厦和加速度。
V C3=V B+V C3B=V C2+V C3C2(2 分)aC3=aB+a n C3B+a C38=aC2+a C3C2+a”C3C2Vc2=0 3C2=0 (2 分)Vc30=O U) 3=0 a k C3C2=0(1分)(1分)答:(3分)答:(2分)V C2=V B+V C28=V O3+V G2C3U)3=W 2=0(2分)(2分)(1分)& f t k ra^+a C2B+3 C2B~3C3+3 C2C3+3 C2C3(3分)(c)(bj s bi iV B3=V B2B3B2(2分)(1分) a 阴+a B3_aB2+a B3B2+a B3B2 3- 13试判斷在图示的两机构中.B 点足否都存在哥氏加速度又在何位置哥氏加速度为零忤 出相应的机构位置图。
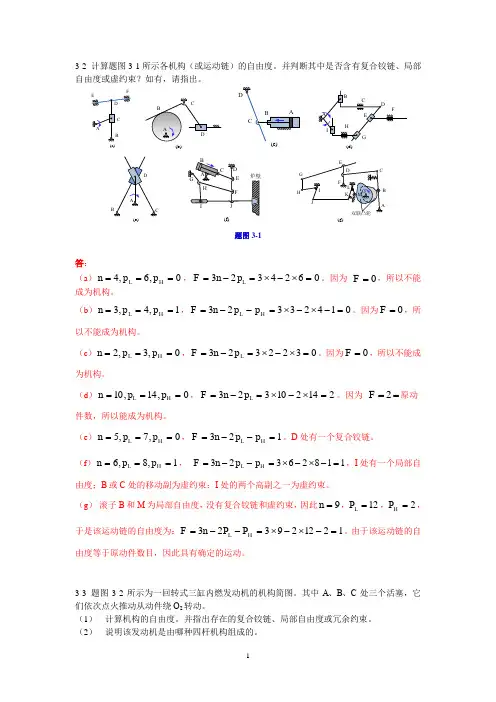
3-2 计算题图3-1所示各机构(或运动链)的自由度。
并判断其中是否含有复合铰链、局部自由度或虚约束?如有,请指出。
(b)(d)(g)题图3-1答:(a )064===H L p ,p ,n ,0624323=⨯-⨯=-=L p n F 。
因为 0=F ,所以不能成为机构。
(b )143===H L p ,p ,n ,01423323=-⨯-⨯=--=H L p p n F 。
因为0=F ,所以不能成为机构。
(c )032===H L p ,p ,n ,0322323=⨯-⨯=-=L p n F 。
因为0=F ,所以不能成为机构。
(d )01410===H L p ,p ,n ,214210323=⨯-⨯=-=L p n F 。
因为 2F ==原动件数,所以能成为机构。
(e )075===H L p ,p ,n ,123=--=H L p p n F 。
D 处有一个复合铰链。
(f )186===H L p ,p ,n , 32362811L H F n p p =--=⨯-⨯-=,I 处有一个局部自由度;B 或C 处的移动副为虚约束;I 处的两个高副之一为虚约束。
(g ) 滚子B 和M 为局部自由度,没有复合铰链和虚约束,因此9=n ,12=L P ,2=H P ,于是该运动链的自由度为:121229323=-⨯-⨯=--=H L P P n F 。
由于该运动链的自由度等于原动件数目,因此具有确定的运动。
3-3 题图3-2所示为一回转式三缸内燃发动机的机构简图。
其中A 、B 、C 处三个活塞,它们依次点火推动从动件绕O 2转动。
(1) 计算机构的自由度。
并指出存在的复合铰链、局部自由度或冗余约束。
(2) 说明该发动机是由哪种四杆机构组成的。
题图3-2解:机构的自由度为1。
O 1处有复合铰链。
曲柄滑块机构。
无局部自由度和冗余约束。
注:O 1O 2有一个杆。
3-6 试计算题图3-4所示两种8杆机构的自由度,并进行ADAMS 模型运动仿真。

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
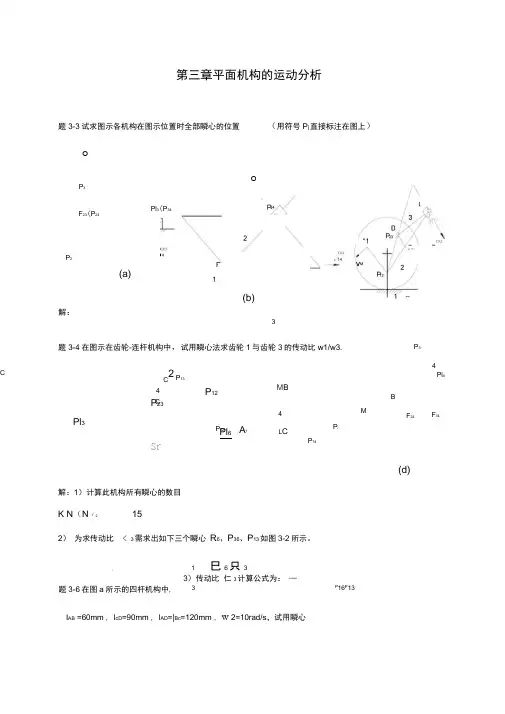
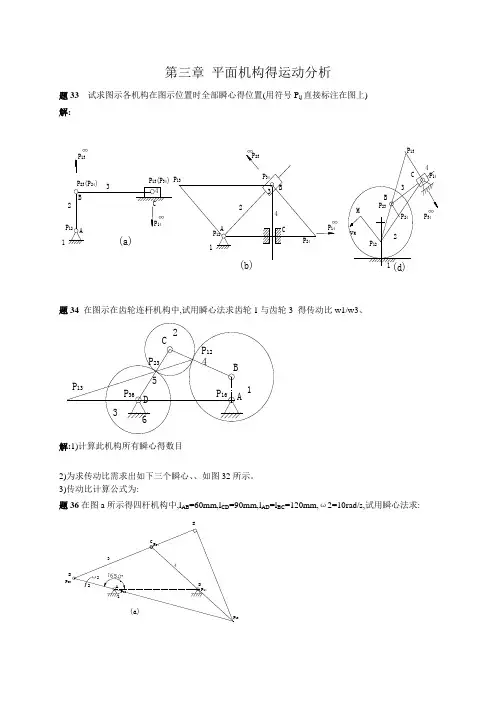
O OO OP 2P 3F 23(P 24Pl 3(P 34)(a)(b)Pl 3Pl 6A 1题3-6在图a 所示的四杆机构中,第三章平面机构的运动分析题3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P j 直接标注在图上)解:题3-4在图示在齿轮-连杆机构中,试用瞬心法求齿轮1与齿轮3的传动比w1/w3.C 2P 12P 23St -解:1)计算此机构所有瞬心的数目K N (N1)2152) 为求传动比 < 3需求出如下三个瞬心 R 6、P 36、P 13如图3-2所示。
; 1 巳6只33) 传动比 仁3计算公式为: —3P 16P 13I AB =60mm , l cD =90mm , l AD =|Bc =120mm , w 2=10rad/s ,试用瞬心P134 C 4L CP 12AM B3P iP 34CBMF 24F 34P ?4(d)Pl 4法求:V B3I AB2IAB lBPI32.56rad sV ClCR 3 3 0.4m s量得 1 26.42 226.6P 3434B P 233 22A ,D- i Pl4P 12 1(a)P 131) 当0 =165。
时,点C 的速度Vc ;2) 当$ =165。
时,构件3的BC 线上速度最小的一点 E 的位置及速度的大小; 3) 当Vc=O 时,0角之值(有两个解)解:1)以选定比例尺,绘制机构运动简图。
(图3-3 )2)求V c ,定出瞬心P 13的位置。
如图 3-3 (a )3)定出构件3的BC 线上速度最小的点 E 的位置。
因为BC 线上速度最小的点必与 P 13点的距离最近,所以过 P 13点引BC 线延长线的垂线交于 E 点。
如图3-3 (a )v E1ER 3 3 0.375ms4)当V C 0时,P 13与C 点重合,即AB 与BC 共线有两个位置。
作出 V C 0的两个位置。
题3-12在图示的各机构中,设已知各构件的尺寸、原动件 1以等角速度3 1顺时针方向转动。
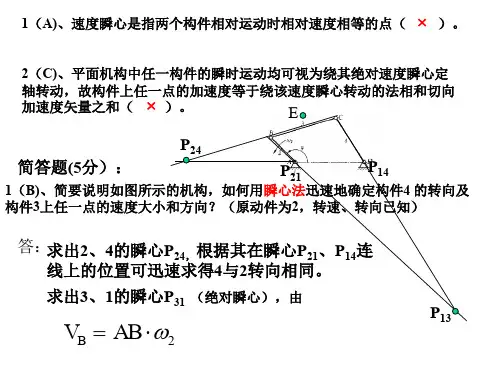
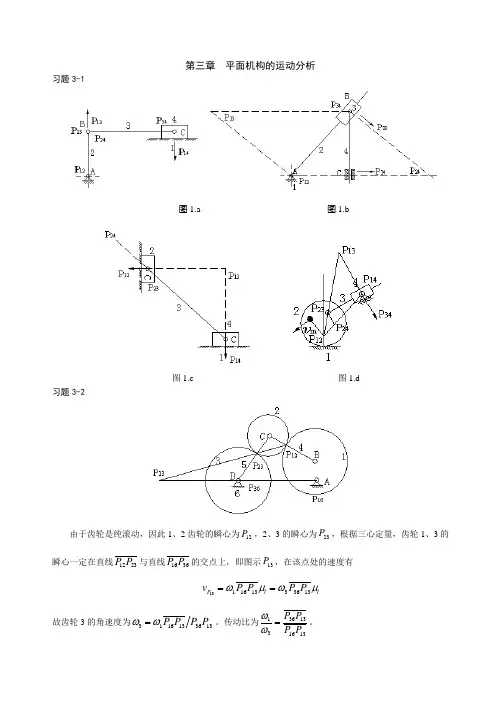
第三章 平面机构的运动分析习题3-1图1.a 图1.b图1.c 图1.d习题3-2由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P 与直线3616P P 的交点上,即图示13P,在该点处的速度有 l l P P P P P v μωμω133631316113==故齿轮3的角速度为1336131613P P P ωω=。
传动比为1316133631P P P P =ωω。
习题3-3答:1)三个瞬心中,14P 、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
习题3-4 取比例尺为mmm l 003.0=μ,作图如下1) 由图上可知:l l P P P P P v μωμω241442412224==,根据量得的长度,得s rad P P P P /455.414.72/14.32102414241224=⨯==ωω 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=⨯⨯==μω2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为 ()s rad C P v l c /53.2)67.52003.0/(4.0133=⨯==μω 显然构件3上速度最小点在E 点,则其速度为s m EP v l E /36.0003.04.4753.2133=⨯⨯==ω3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=∠=DAB ϕ,02227''=∠=DAB ϕ。
第3章3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点?答:参考教材30~31页。
3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定?答:参考教材31页。
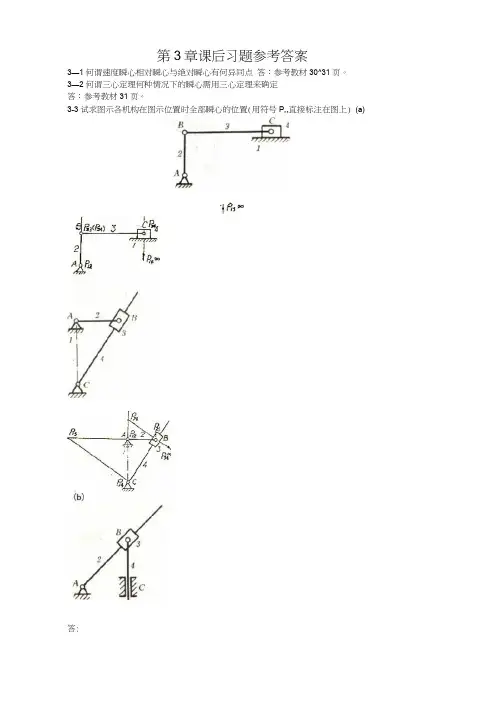
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a)(b)答:答:(10分)(d)(10分)3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目:K=N(N-1)/2=6(6-1)/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置3)ω1/ω3= P 36P 13/P 16P 13=DK/AK由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求:1)当φ=165°时,点的速度vc ;2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;3)当V C =0时,φ角之值(有两个解)。
解:1)以选定的比例尺μ机械运动简图(图b )2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003×78=2.56(rad/s)v c =μc p 13ω3=0.003×52×2.56=0.4(m/s)3)定出构件3的BC 线上速度最小的点E 的位置,因BC 线上速度最小的点必与p13点的距离最近,故丛p13引BC 线的垂线交于点E ,由图可得(2分)(3分)v E=μl.p13Eω3=0.003×46.5×2.56=0.357(m/s)4)定出vc=0时机构的两个位置(图c)量出φ1=26.4°φ2=226.6°3-8机构中,设已知构件的尺寸及点B的速度v B(即速度矢量pb),试作出各机构在图示位置时的速度多边形。
3-2 在如图所示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω3。
顺时针)(v 1613361331361331613113P P P PP P P P P ===ωωωω3-3在如图3-32所示的四杆机构中,LAB=60mm ,LCD=90mm ,LAD=LBC=120mm ,ω2=rad/s ,试用瞬心法求:(1) 当φ=165°时,点C 的速度vc;(2) 当φ=165°时,构件3的BC 线上(或延长线上)速度最小的一点E 的位置及其速度的大小;(3) 当vC=0时,φ角之值(有两个解)。
sm EP P P v P P v s m v s rad P P P P P P P P E C C CD C P /36.0143.055.2v (rad/s 55.2158.0403.0/403.009.048.4(/48.438.21738.9710v 133133431334341424122424142441224224=⨯=======⨯=⨯==⨯====ωωωωωωωω顺时针)顺时针)3-4在如图3-33所示的凸轮机构中,已知r=50mm ,LOA=30mm ,LAC=90mm ,φ1=90°,凸轮1以角速度ω1=10rad/s 逆时针转动。
试用瞬心法求从动件的角速度ω2。
顺时针)(/79.286.12486.3410v 2312131212231221312112s rad P P P P P P P P P =⨯====ωωωω 3-5在如图3-34所示的各机构中,已知各构件的尺寸及B 点的速度vB ,试作出其如图3-34所示位置时的速度多边形。
3-6在如图3-35所示的各机构中,已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在如图3-35所示位置时构件3上C 点的速度及角速度。
3-8A BCDEbk ec3。