机械原理(双语)第三章lecture3-1&2
- 格式:ppt
- 大小:1.19 MB
- 文档页数:57
3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点?答:参考教材30~31页。
3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定?答:参考教材31页。
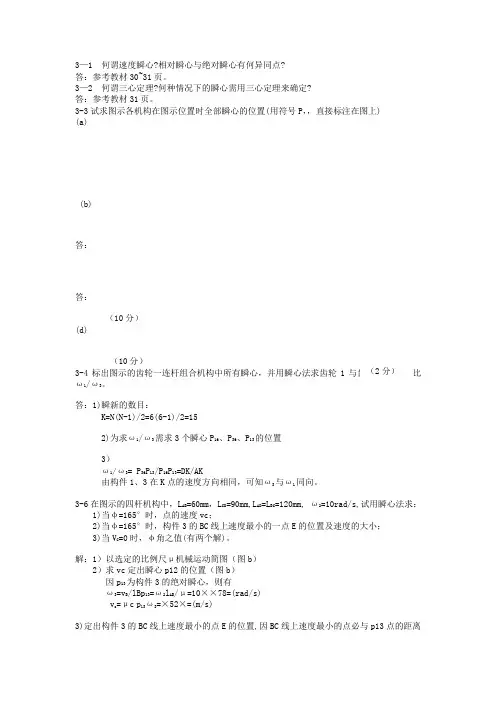
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P ,,直接标注在图上) (a)(b)答:答:(10分)(d)(10分)3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1ω1/ω3。
答:1)瞬新的数目:K=N(N-1)/2=6(6-1)/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置3)ω1/ω3= P 36P 13/P 16P 13=DK/AK由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求:1)当φ=165°时,点的速度vc ;2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;3)当V C =0时,φ角之值(有两个解)。
解:1)以选定的比例尺μ机械运动简图(图b )2)求vc 定出瞬心p12的位置(图b )因p 13为构件3的绝对瞬心,则有ω3=v B /lBp 13=ω2l AB /μ=10××78=(rad/s)v c =μc p 13ω3=×52×=(m/s)3)定出构件3的BC 线上速度最小的点E 的位置,因BC 线上速度最小的点必与p13点的距离最近,故丛p13引BC线的垂线交于点E,由图可得v E=μω3=××=(m/s)4)定出vc=0时机构的两个位置(图c)量出φ1=°φ2=°3-8机构中,设已知构件的尺寸及点B的速度v B(即速度矢量pb),试作出各机构在图示位置时的速度多边形。
答:(10分)(b)答:答:3—11 速度多边形和加速度多边彤有哪些特性?试标出图中的方向。
![机械原理第3章3[1].3](https://uimg.taocdn.com/4a3db78371fe910ef12df852.webp)
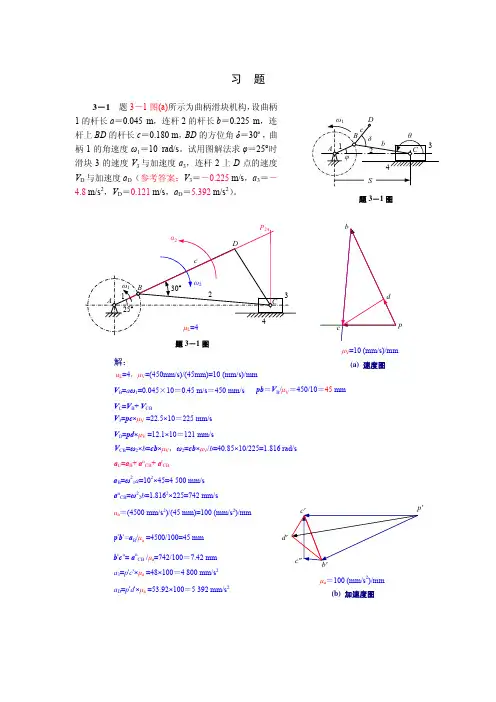
题3-1图习 题3-1 题3-1图(a)所示为曲柄滑块机构,设曲柄1的杆长a =0.045 m ,连杆2的杆长b =0.225 m ,连杆上BD 的杆长c =0.180 m ,BD 的方位角δ=30º,曲柄1的角速度ω1=10 rad/s 。
试用图解法求φ=25°时滑块3的速度V 3与加速度a 3,连杆2上D 点的速度V D 与加速度a D (参考答案:V 3=-0.225 m/s ,a 3=-4.8 m/s 2,V D =0.121 m/s ,a D =5.392 m/s 2)。
V B =a ω1=0.045×10=0.45 m/s =450 mm/s μL =4,μV =(450mm/s)/(45mm)=10 (mm/s)/mm V 3=pc ×μV =22.5×10=225 mm/s V D =pd ×μV =12.1×10=121 mm/spV C =V B + V CBV CB =ω2×b =cb ×μV ,ω2=cb ×μV /b =40.85×10/225=1.816 rad/s a C =a B + a n CB + a t CBa B =ω21a =102×45=4 500 mm/s a n CB =ω22b =1.8162×225=742 mm/sμa =(4500 mm/s 2)/(45 mm)=100 (mm/s 2)/mm b 'c "= a n CB /μa =742/100=7.42 mm p 'b '=a B /μa =4500/100=45 mm a 3=p 'c '×μa =48×100=4 800 mm/s 2d'a D =p 'd '×μa =53.92×100=5 392 mm/s 2题3-1图(a) 速度图(b) 加速度图解:pb =V B /μV =450/10=45 mmμV =10 (mm/s)/mm μa =100 (mm/s 2)/mm题3-3图(a) (b)题3-2图图上尺寸 a =7.26 mmb =26.47 mmc 31=18.58 mmd =28.02 mmc 32=18.58 mmpa =22.8 mm V B =V A +V BApb =19.66 mmV B =19.66×50=983 mm/s V 5=ω3 c 32=1.058×18.58×50=983 mm/s速度图V A =a ω1=7.26×50×3.14=1140.4 mm/s μV =50 (mm/s)/mmab dpω3=V B /c 31=983/(18.58×50)=1.058 rad/s3-2 题3-2图所示为油田抽油机机构,D 1D 2为中心在O 3点、半径为c 32的圆弧,5为钢丝绳与抽油活塞组合体,长度比例尺μL =实际尺寸/图上尺寸=50,ω1=3.14 rad/s ,试用图解法求活塞5在图示位置的速度V 5(参考答案:V 5=0.983 m/s )。
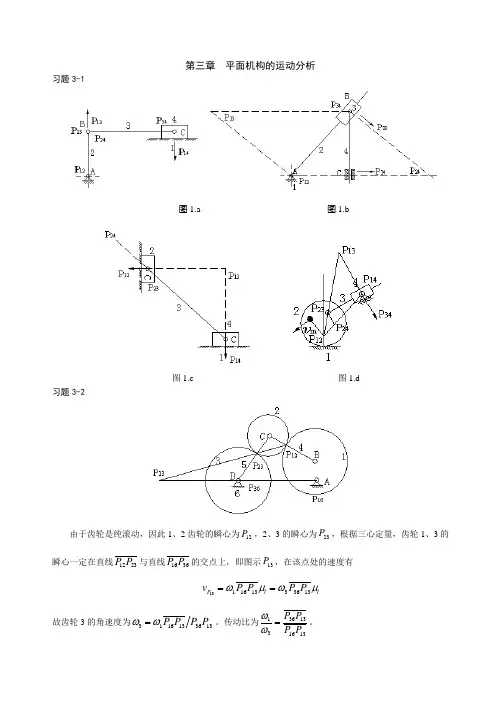
第三章 平面机构的运动分析习题3-1图1.a 图1.b图1.c 图1.d习题3-2由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P 与直线3616P P 的交点上,即图示13P,在该点处的速度有 l l P P P P P v μωμω133631316113==故齿轮3的角速度为1336131613P P P ωω=。
传动比为1316133631P P P P =ωω。
习题3-3答:1)三个瞬心中,14P 、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
习题3-4 取比例尺为mmm l 003.0=μ,作图如下1) 由图上可知:l l P P P P P v μωμω241442412224==,根据量得的长度,得s rad P P P P /455.414.72/14.32102414241224=⨯==ωω 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=⨯⨯==μω2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为 ()s rad C P v l c /53.2)67.52003.0/(4.0133=⨯==μω 显然构件3上速度最小点在E 点,则其速度为s m EP v l E /36.0003.04.4753.2133=⨯⨯==ω3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=∠=DAB ϕ,02227''=∠=DAB ϕ。