常见机械结构图
- 格式:ppt
- 大小:1.75 MB
- 文档页数:3
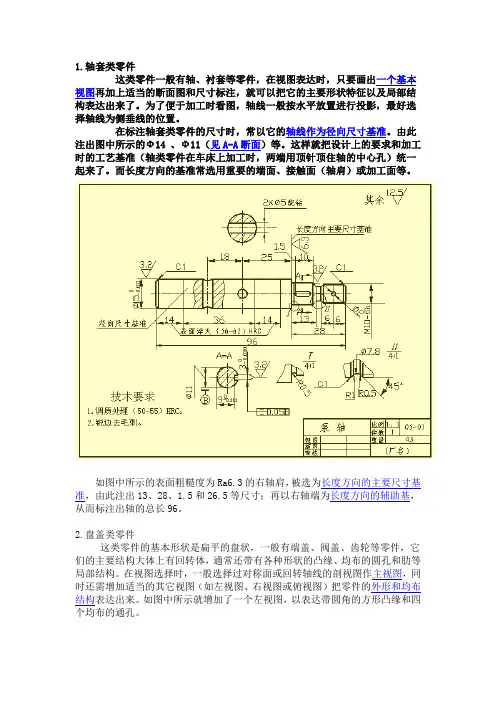
1.轴套类零件这类零件一般有轴、衬套等零件,在视图表达时,只要画出一个基本视图再加上适当的断面图和尺寸标注,就可以把它的主要形状特征以及局部结构表达出来了。
为了便于加工时看图,轴线一般按水平放置进行投影,最好选择轴线为侧垂线的位置。
在标注轴套类零件的尺寸时,常以它的轴线作为径向尺寸基准。
由此注出图中所示的Ф14 、Ф11(见A-A断面)等。
这样就把设计上的要求和加工时的工艺基准(轴类零件在车床上加工时,两端用顶针顶住轴的中心孔)统一起来了。
而长度方向的基准常选用重要的端面、接触面(轴肩)或加工面等。
如图中所示的表面粗糙度为Ra6.3的右轴肩,被选为长度方向的主要尺寸基准,由此注出13、28、1.5和26.5等尺寸;再以右轴端为长度方向的辅助基,从而标注出轴的总长96。
2.盘盖类零件这类零件的基本形状是扁平的盘状,一般有端盖、阀盖、齿轮等零件,它们的主要结构大体上有回转体,通常还带有各种形状的凸缘、均布的圆孔和肋等局部结构。
在视图选择时,一般选择过对称面或回转轴线的剖视图作主视图,同时还需增加适当的其它视图(如左视图、右视图或俯视图)把零件的外形和均布结构表达出来。
如图中所示就增加了一个左视图,以表达带圆角的方形凸缘和四个均布的通孔。
在标注盘盖类零件的尺寸时,通常选用通过轴孔的轴线作为径向尺寸基准,长度方向的主要尺寸基准常选用重要的端面。
3.叉架类零件这类零件一般有拨叉、连杆、支座等零件。
由于它们的加工位置多变,在选择主视图时,主要考虑工作位置和形状特征。
对其它视图的选择,常常需要两个或两个以上的基本视图,并且还要用适当的局部视图、断面图等表达方法来表达零件的局部结构。
踏脚座零件图中所示视图选择表达方案精练、清晰对于表达轴承和肋的宽度来说,右视图是没有必要的,而对于T字形肋,采用剖面比较合适。
在标注叉架类零件的尺寸时,通常选用安装基面或零件的对称面作为尺寸基准。
尺寸标注方法参见图。
4.箱体类零件一般来说,这类零件的形状、结构比前面三类零件复杂,而且加工位置的变化更多。

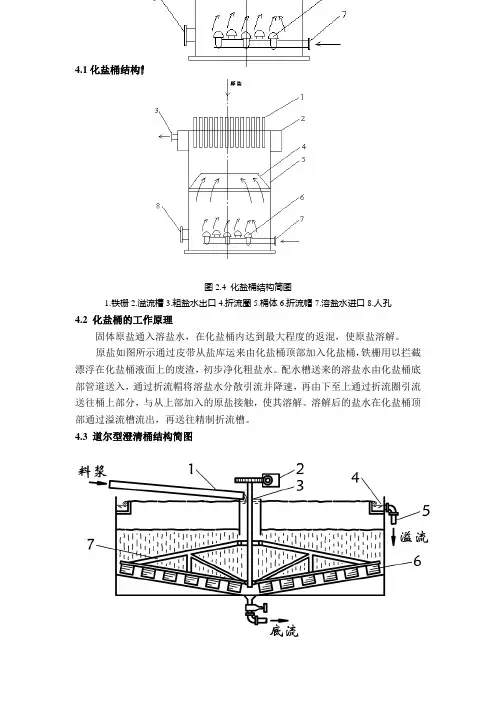
4.1化盐桶结构简图图2.4 化盐桶结构简图1.铁栅2.溢流槽3.粗盐水出口4.折流圈5.桶体6.折流帽7.溶盐水进口8.人孔4.2 化盐桶的工作原理固体原盐通入溶盐水,在化盐桶内达到最大程度的返混,使原盐溶解。
原盐如图所示通过皮带从盐库运来由化盐桶顶部加入化盐桶,铁栅用以拦截漂浮在化盐桶液面上的废渣,初步净化粗盐水。
配水槽送来的溶盐水由化盐桶底部管道送入,通过折流帽将溶盐水分散引流并降速,再由下至上通过折流圈引流送往桶上部分,与从上部加入的原盐接触,使其溶解。
溶解后的盐水在化盐桶顶部通过溢流槽流出,再送往精制折流槽。
4.3 道尔型澄清桶结构简图图2.5道尔型澄清桶结构简图1、进料通道2、转动机构3、料井4、溢流槽5、溢流管6、叶片7、转耙4.4 道尔型澄清桶工作原理粗盐水流入澄清筒后,氢氧化镁和碳酸钙沉淀及原盐中的固体细渣在其内自然沉降得到澄清液,达到固液分离的目的,除去盐水中固体渣子。
由精制折流槽送过来的粗盐水通过粗盐水入口由中心筒引流进入澄清筒底部,并进行澄清。
经过一段时间的澄清后,在桶的底部存有大量的泥渣,定期开动传动耙由排泥口将泥渣排出桶外,送至泥罐。
经过澄清后的盐水由澄清筒顶部的溢流槽流出,送至砂滤器进一步净化。
4.5 砂滤器结构简图图2.6 砂滤器结构简图4.6 砂滤器工作原理砂滤器是用砂层和卵石层作为过滤介质,通过虹吸原理,将澄清液再次净化的设备。
洗水(即澄清液)通过洗水入口进入砂滤器A管顺势下流至B管(下端连接一倒扣漏斗装置埋于砂层内)再流经砂层和卵石层进行过滤,滤液由I、J引流至砂层上方,由精制液出口流出。
当砂层和卵石层由于长时间过滤,介质间间隙被截止的沉淀堵住时,洗水则不再往下流,而是沿B管满出至C管,当溢至a点时,液体由D管流出,此时,G、F管内空气被液体带出,形成低压。
又精制液出口与大气相同,大气将精制液由e点压入H管经G、E管流出,同时使砂层和卵石层间隙中的沉淀倒吸入B 管顺水流流出(即反洗污水)。
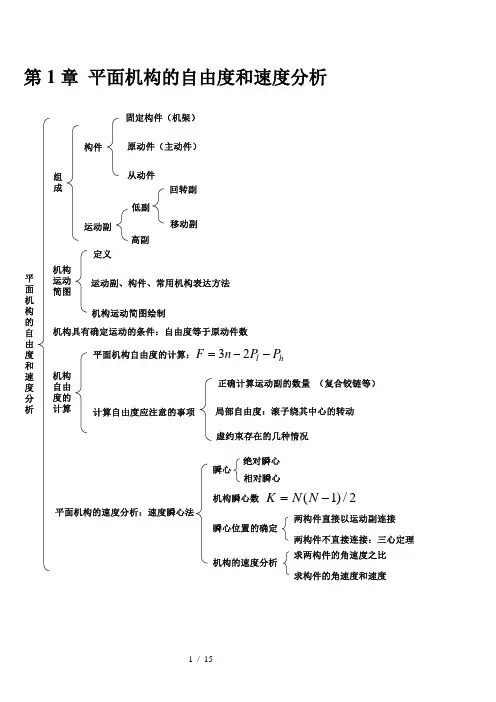
第1章 平面机构的自由度和速度分析平面机构的自由度和速度分析组成机构自由度的计算构件运动副机构运动简图运动副、构件、常用机构表达方法定义平面机构自由度的计算:机构具有确定运动的条件:自由度等于原动件数固定构件(机架)低副从动件原动件(主动件)高副移动副回转副机构运动简图绘制hl P P n F--=23计算自由度应注意的事项局部自由度:滚子绕其中心的转动正确计算运动副的数量 (复合铰链等)虚约束存在的几种情况平面机构的速度分析:速度瞬心法瞬心机构瞬心数瞬心位置的确定机构的速度分析相对瞬心绝对瞬心2/)1(-=N N K 两构件不直接连接:三心定理两构件直接以运动副连接求构件的角速度和速度求两构件的角速度之比第2章 平面连杆机构曲柄摇杆机构曲柄滑块机构 演化机构杆机平面四杆机构的 基本型式按行程速比系数设计:利用机构在极位时几何关系已知连杆三个位置,求圆心法应用:夹紧装置中的防松构连面平基本型式及其演化双曲柄机构 双摇杆机构 导杆机构 摇块机构和定块机构 双滑块机构 偏心轮机构平面四杆机构 的主要特性急回特性急回运动行程速比速度变化系数 θθ-+==18018012v v K应用: 当θ>0时,K >1,机构有急回特性 压力角 压力角α:从动件受力方向和速度方向所夹锐角 传动角γ:压力角的余角传动角α越小,γ越大,机构的传力性能越好40min ≤γ,出现在曲柄与机架共线两位置之一和 死点曲柄为从动件时,曲柄与连杆共线位置, 0=γ 消除方法:利用飞轮或机构自身的惯性力 有整转副条件 ≤+max min l l 另两杆长度之和;整转副由最短杆与其邻边组成有整转副时, 曲柄摇杆机构—最短杆邻边为机架 双曲柄机构—最短杆为机架 双摇杆机构—最短杆对边为机架存在的不同机构四杆机构设计 作图法:解析法:利用几何关系列解析式求解实验法凸轮机构的分类凸轮机构及其设计推杆的运动形式基本概念:基圆、基圆半径、推程、升程、推程运动角、回程、回程运动角、休止、远休止角、近休止角、压力角。