时域分析法习题与解答
- 格式:doc
- 大小:869.50 KB
- 文档页数:9
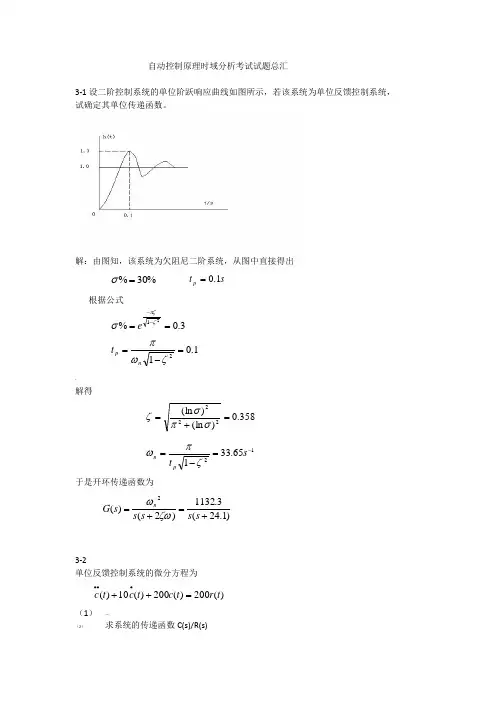
自动控制原理时域分析考试试题总汇3-1设二阶控制系统的单位阶跃响应曲线如图所示,若该系统为单位反馈控制系统, 试确定其单位传递函数。
解:由图知,该系统为欠阻尼二阶系统,从图中直接得出%30%=σ s t p 1.0=根据公式3.0%21==--ζπζσe1.012=-=ζωπn p t,解得358.0)(ln )(ln 222=+=σπσζ1265.331-=-=s t p n ζπω于是开环传递函数为)1.24(3.1132)2()(2+=+=s s s s s G n ζωω 3-2单位反馈控制系统的微分方程为)(200)(200)(10)(t r t c t c t c =++•••(1) — (2) 求系统的传递函数C(s)/R(s)(3) 求系统的阻尼比和自然振荡频率 (4) 求系统的开环传递函数 (5) 若r(t)=1+2t,求稳态误差(6) 若r(t)=2sin(10t+5),求稳态输出3-4设电子心率起搏器系统如图所示,其中模仿心脏的传递函数相当于一纯积分器。
要求: (1) 若5.0=ζ对于最佳响应,问起搏器的增益K 应为多大(2) 若期望心速为60次/min ,并突然接通起搏器,问1s 后实际心速为多少瞬时最大心速为多大解:(1)系统的开环传递函数为:)105.0()(+=s s Ks G:所以闭环传递函数 Ks s KK s s K s 202020)105.0()(2++=++=φ5.0,202,202===ζζωωn n K解之得:K=20 20=n ω (2) 闭环传递函数写为40020400)(2++=s s s φ 闭环极点 j s 310102,1±-= 所以系统单位脉冲响应为)310sin 310(cos )(10t j t et h t+=- 所以阶跃响应 ⎰=τ)(60)(dt t h t c =)1(6010τ-+ec(1)=次/min 峰值时间181.025.0120141.312=-⨯=-=ζωπn p t s{%5.16%75.05.012===⨯---πζπζσee最大心率为m in /9.69%)5.161(60次=+⨯3-5已知控制系统结构如图所示,(1) 当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。
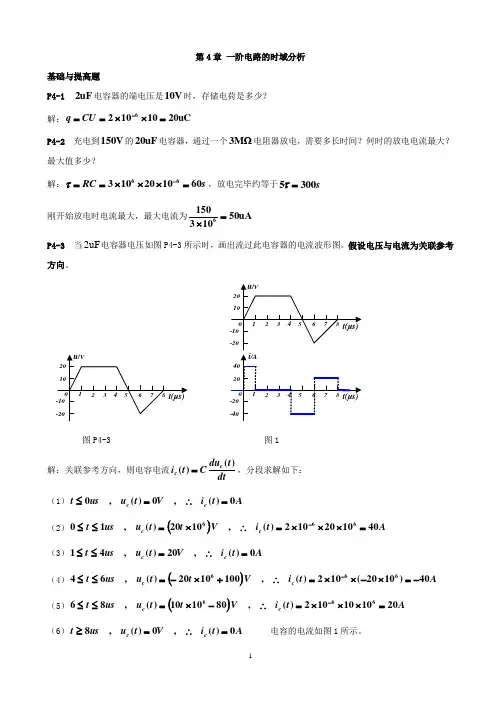
第4章 一阶电路的时域分析基础与提高题P4-1 uF 2电容器的端电压是V 10时,存储电荷是多少? 解:uC 20101026=⨯⨯==-CU qP4-2 充电到V 150的uF 20电容器,通过一个M Ω3电阻器放电,需要多长时间?何时的放电电流最大?最大值多少?解:s RC 60102010366=⨯⨯⨯==-τ,放电完毕约等于s 3005=τ 刚开始放电时电流最大,最大电流为uA 501031506=⨯ P4-3 当uF 2电容器电压如图P4-3所示时,画出流过此电容器的电流波形图。
假设电压与电流为关联参考方向。
图P4-3 图1解:关联参考方向,则电容电流dtt du C t i c c )()(=,分段求解如下: (1)A t i V t u ust c c 0)(,0)(,0=∴=≤(2)()A t i Vt t u us t c c 401020102)(,1020)(,10666=⨯⨯⨯=∴⨯=≤≤-(3)A t i V t u us t c c 0)(,20)(,41=∴=≤≤(4)()A t i V t t u us t c c 40)1020(102)(,1001020)(,64666-=⨯-⨯⨯=∴+⨯-=≤≤-(5)()A t i Vt t u us t c c 201010102)(,801010)(,86666=⨯⨯⨯=∴-⨯=≤≤-(6)A t i V t u ust c c 0)(,0)(,8=∴=≥ 电容的电流如图1所示。
P4-4 0.32tA 电流流过150mH 电感器,求s t 4=时,电感器存储的能量。
解:电感器存储的能量()23232.0101502121t Li W ⨯⨯⨯==- 当s t 4=时,电感器存储的能量为P4-5 由20V 电源与Ω2电阻、H 6.3电感组成的串联电路,合上开关后经过多长时间电流达到其最大值,最大值多少?设合上开关前电感无初始储能。
第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+00125125 3-2 设某高阶系统可用下列一阶微分方程T c t c t r t r t ∙∙+=+()()()()τ近似描述,其中,1)(0<-<τT 。
试证系统的动态性能指标为 T T T t d ⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=τln 693.0t T r =22. T T T t s ⎥⎦⎤⎢⎣⎡-+=)ln(3τ 解 设单位阶跃输入ss R 1)(=当初始条件为0时有:11)()(++=Ts s s R s C τ 11111)(+--=⋅++=∴Ts T s s Ts s s C ττC t h t T Te t T()()/==---1τ 1) 当 t t d = 时h t T Te t td ()./==---051τ12=--T T e t T d τ/ ; T t T T d -⎪⎭⎫ ⎝⎛-=-τln 2ln ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=∴T T T t d τln 2ln2) 求t r (即)(t c 从1.0到9.0所需时间)当 Tt e TT t h /219.0)(---==τ; t T T T 201=--[ln()ln .]τ 当 Tt e TT t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21090122ln ... 3) 求 t sTt s s e TT t h /195.0)(---==τ ]ln 3[]20ln [ln ]05.0ln [ln TT T T T T T T T t s τττ-+=+-=--=∴3-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
第2章 线性时不变连续系统的时域分析2.1 学习要求(1)会建立描述系统激励与响应关系的微分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统微分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统微分方程和输入判断0时刻的跳变情况; (7)理解卷积运算在信号与系统中的物理意义和运算规律,会计算信号的卷积。
; 2.2 本章重点(1)系统(电子、机械)数学模型(微分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激响应及其求解;(4)卷积的定义、性质及运算,特别是()t δ函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
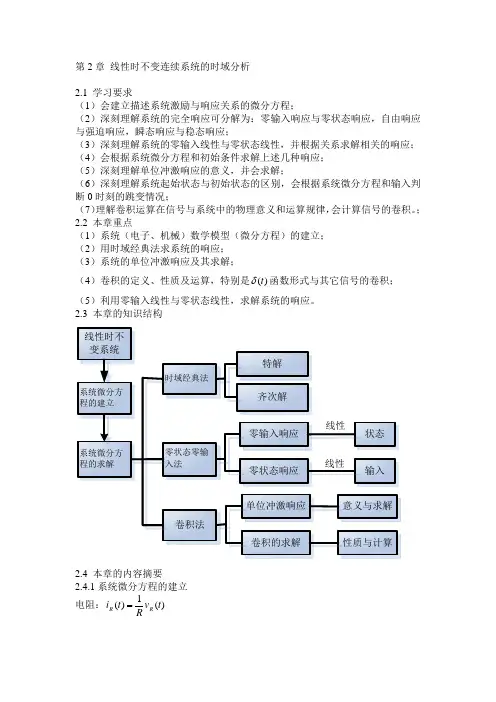
2.3 本章的知识结构2.4 本章的内容摘要2.4.1系统微分方程的建立电阻:)(1)(t v Rt i R R =电感:dtt di L t v L L )()(= )(d )(1)(0t i v Lt i L tL L +=⎰∞-ττ 电容:dtt dv C t i C C )()(= ⎰+=tt L C C t i i Ct v 0)(d )(1)(0ττ 2.4.2 系统微分方程的求解 齐次解和特解。
齐次解为满足齐次方程t n t t h e c e c e c t y 32121)(λλλ+⋅⋅⋅++=当特征根有重根时,如1λ有k 重根,则响应于1λ的重根部分将有k 项,形如t k t k t k t k h e c te c e t c e t c t y 111112211)(λλλλ++⋅⋅⋅++=--- 当特征根有一对单复根,即bi a +=2,1λ,则微分方程的齐次解bt e c bt e c t y at at h sin cos )(21+= 当特征根有一对m 重复根,即共有m 重ib a ±=2,1λ的复根,则微分方程的齐次解bt e t c bt te c bt c t y at m m at h cos cos cos )(121-+⋅⋅⋅++= bt e t d bt te d bt e d at m m at at sin sin sin 121-+⋅⋅⋅+++ 特解的函数形式与激励函数的形式有关。
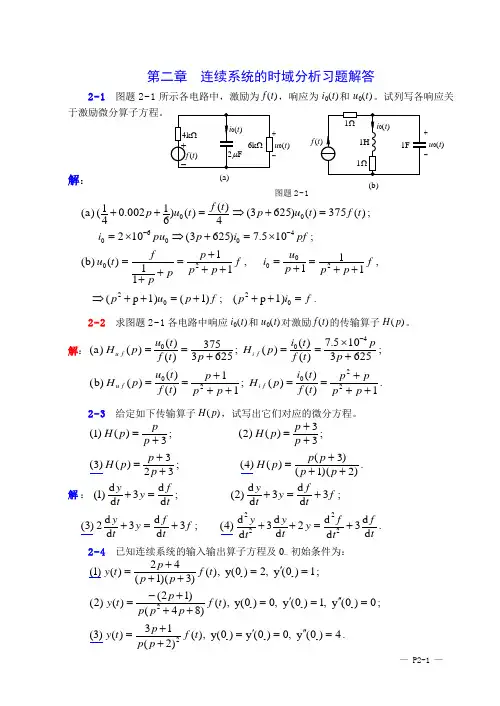
— P2-1 —第二章 连续系统的时域分析习题解答2-1 图题2-1所示各电路中,激励为f (t ),响应为i 0(t )和u 0(t )。
试列写各响应关于激励微分算子方程。
解:.1)p ( ; )1(1)p ( , 111 , 1111)( )b (;105.7)625(3 102 ;)(375)()6253(4)()()61002.041( )a (0202200204006000f i p f p u p f p p p u i f p p p ppft u pf i p pu i t f t u p t f t u p =+++=++⇒++=+=+++=++=⨯=+⇒⨯==+⇒=++-- 2-2 求图题2-1各电路中响应i 0(t )和u 0(t )对激励f (t )的传输算子H (p )。
解:.1)()()( ; 11)()()( )b (;6253105.7)()()( ; 6253375)()()( )a (220 20 40 0 +++==+++==+⨯==+==-p p p p t f t i p H p p p t f t u p H p p t f t i p H p t f t u p H f i f u f i fu2-3 给定如下传输算子H (p ),试写出它们对应的微分方程。
.)2)(1()3()( )4( ; 323)( )3(; 33)( )2( ; 3)( )1( +++=++=++=+=p p p p p H p p p H p p p H p p p H解:; 3d d 3d d )2( ; d d 3d d)1( f tf y t y t f y t y +=+=+ . d d 3d d 2d d 3d d )4( ; 3d d 3d d 2 )3( 2222t f tf y t y t y f t f y t y +=+++=+ 2-4 已知连续系统的输入输出算子方程及0– 初始条件为:.4)(0y ,0)(0y )y(0 ),()2(13)( )3(; 0)(0y ,1)(0y ,0)y(0 ),()84()12()( )2(;1)(0y ,2)y(0 ),()3)(1(42)( )1(---2---2--=''='=++==''='=+++-=='=+++=t f p p p t y t f p p p p t y t f p p p t yf (u 0(t ) (b) u 0(t ) (a)图题2-1— 2 —试求系统的零输入响应y x (t )(t /0)。
1. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是____________,另一个是__________分量。
2. 函数f(t)=te63-的拉氏变换式是________________________________。
3. 积分环节的传递函数表达式为G (s )=_________________________。
4.在斜坡函数的输入作用下,___________型系统的稳态误差为零。
四、控制系统结构图如图2所示。
(1)希望系统所有特征根位于s 平面上s =-2的左侧区域,且ξ不小于0.5。
试画出特征根在s 平面上的分布范围(用阴影线表示)。
(2)当特征根处在阴影线范围内时,试求,K T 的取值范围。
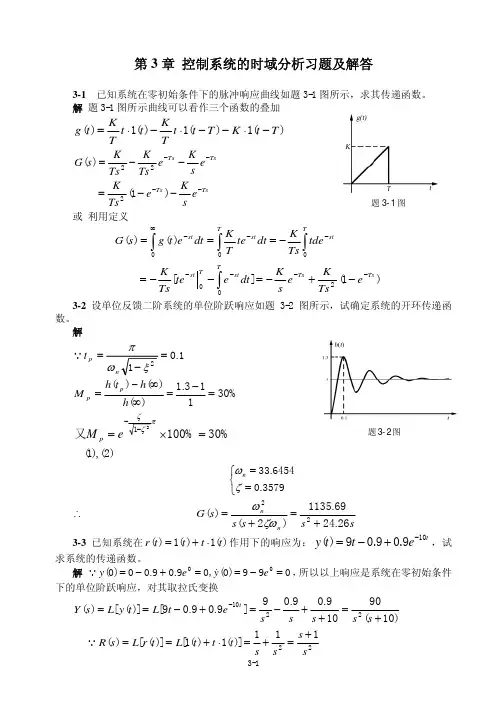
(20分)五、已知系统的结构图如图3所示。
若()21()r t t =⨯时,试求(1)当0f K =时,求系统的响应()c t ,超调量%σ及调节时间s t 。
(2)当0f K ≠时,若要使超调量%σ=20%,试求f K 应为多大?并求出此时的调节时间s t 的值。
(3)比较上述两种情况,说明内反馈f K s 的作用是什么? (20分)图3六、系统结构图如图4所示。
当输入信号()1()r t t =,干扰信号()1()n t t =时,求系统总的稳态误差e ss 。
(15分)图41、 根轨迹是指_____________系统特征方程式的根在s 平面上变化的轨迹。
2、 线性系统稳定的充分必要条件是闭环传递函数的极点均严格位于s______________半平面3、在二阶系统中引入比例-微分控制会使系统的阻尼系数________________。
9、已知单位反馈系统的开环传递函数50 ()(0.11)(5)G ss s s=++,则在斜坡信号作用下的稳态误差为_________。
3、某控制系统的方框图如图所示,试求(16分)(1)该系统的开环传递函数)(sGk、闭环传递函数)()(sRsC和误差传递函数)()(sRsE。
第1题单位冲击函数性质 P18 1.,故答案为02.在t=0处有值其余点为0,t=0 (-,-1],故答案为03.的导数为,故答案为4.原式=,故答案为15.当t=2时,有意义,将t=2代入,得原式=,故答案为第二题单位冲击序列性质 P94-96 1.只有n=1时,有意义,将1代入原式,故答案为12.原式==0,故答案为03.由定义可知答案为4.,故答案为05.同上题,,故答案为0第三题阶跃函数性质-用阶跃函数表示分段函数 P14参考“门函数”,阶跃函数的截取性质1.2.3.4.5.第四题阶跃序列性质-用阶跃序列表示分段序列只有当时=1,其余为01.2.3.4.5.第五题卷积积分 P60-62 1.答案为2.答案为=3.答案为4.答案为5.答案为第六题卷积积分 P101-105 1.答案为2.答案为3.答案为4.答案为5.答案为第七题系统的性质-线性 P27-28 1.若,则有,所以不是线性的2.若,则有,所以不是线性的3.若,则有,所以不是线性的4.若,则有所以是线性的5.若,则有所以不是线性的第八题系统的性质-时不变性 P28-29 1.,所以是时不变的2.,所以是时变的3.,所以是时不变的4.,所以是时变的5.,所以是时变的1.若则有,所以是因果的2.若则有,所以是因果的3.若则有,所以是因果的4.若则有,所以是因果的5.若则有,所以是因果的1.若则有,所以是稳定的2.若但,所以是不稳定的3.若则有,所以是稳定的4.若则有,所以是稳定的5.若但,所以是不稳定标红色的为不确定的,请大家注意一下。
第3章 线性系统的时域分析3.1 学习要点1控制系统时域响应的基本概念,典型输入信号及意义; 2控制系统稳定性的概念、代数稳定判据及应用;3控制系统的时域指标,一阶二阶系统的阶跃响应特性与时域指标计算; 4高阶系统时域分析中主导极点和主导极点法;5 控制系统稳态误差概念、计算方法与误差系数,减小稳态误差的方法。
3.2 思考与习题祥解题3.1 思考与总结下述问题。
(1)画出二阶系统特征根在复平面上分布的几种情况,归纳ξ值对二阶系统特征根的影响规律。
(2)总结ξ和n ω对二阶系统阶跃响应特性的影响规律。
(3)总结增加一个零点对二阶系统阶跃响应特性的影响规律。
(4)分析增加一个极点可能对二阶系统阶跃响应特性有何影响?(5)系统误差与哪些因素有关?试归纳减小或消除系统稳态误差的措施与方法。
(6)为减小或消除系统扰动误差,可采取在系统开环传递函数中增加积分环节的措施。
请问,该积分环节应在系统结构图中如何配置,抗扰效果是否与扰动点相关?答:(1)二阶系统特征根在复平面上分布情况如图3.1所示。
图3.1 二阶系统特征根在复平面上的分布当0ξ=,二阶系统特征根是一对共轭纯虚根,如图中情况①。
当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,变化轨迹是以n ω为半径的圆弧,如图中情况②。
当1ξ=,二阶系统特征根是一对相同的负实根,如图中情况③。
当1ξ>,二阶系统特征根是一对不等的负实根,如图中情况④。
(2)ξ和n ω是二阶系统的两个特征参量。
ξ是系统阻尼比,描述了系统的平稳性。
当0ξ=,二阶系统特征根是一对共轭纯虚根,二阶系统阶跃响应为等幅振荡特性,系统临界稳定。
当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,二阶系统阶跃响应为衰减振荡特性,系统稳定。
ξ越小,二阶系统振荡性越强,平稳性越差;ξ越大,二阶系统振荡性越弱,平稳性越好。
因此,二阶系统的时域性能指标超调量由ξ值唯一确定,即001_100%2⨯=-πξξσe。
第1章 信号及信号的时域分析1. 判断下列信号是否是周期的,如果是周期的,求出它的基频和公共周期。
(1) )30sin()5sin(34)(t t t f ππ+-= (2) )30cos()10cos()(t t t f ππ=(3) )20cos()10cos()(t t t f -=π (4) )42cos(2)2cos()(π--=t t t f解:(1)613052121==ΩΩ=n n 因此,公共周期525212110=⨯=Ω=πππn T ,基频Hz T f 5.225100===(2) )40cos 20(cos 5.0)30cos()10cos()(t t t t t f ππππ+== 2140202121==ΩΩ=n n 因此,公共周期s n T 10120212110=⨯=Ω=πππ基频Hz T f 1010==(3) 由于两个分量的频率比值201021π=ΩΩ是无理数,因此无法找出公共周期。
所以是非周期的。
(4) 两个分量是同频率的,基频 =0f 1/π Hz 。
因此,公共周期π==01f T s 。
2.指出并证明下列信号中哪些是功率信号,哪些是能量信号,哪些既不是功率信号也不是能量信号。
(1) )2(2)1(5)(---+t u t u t u (2) )2(6)1(5)(---+t u t u t u(3) )(5t u et- (4) )()1(5t u e t+-解:(1) 波形如题2解图(a)所示。
显然是功率信号。
t d t f T P T T T ⎰-∞→=2)(21lim 16163611lim 22110=⎥⎦⎤⎢⎣⎡++=⎰⎰⎰→∞t d t d t d T T T W(2) 波形如题2解图(b)所示。
显然是能量信号。
J dt dt E 371611612212102=⨯+⨯=+=⎰⎰ (3) 能量信号 1.0101)(lim 0101025=-===⎰⎰∞∞---∞→Tt t t T e dt e dt e E J (4) 功率信号,显然有 1=P W3. 周期信号如题图3所示,试计算信号的功率。
第三章 时域分析法习题3-1设温度计需要在一分钟内指示出响应值的98%,并且假定温度计为一阶系统,试求时间常数T 。
如果将温度计放在澡盆内,澡盆的温度以min /C 10︒的速度线性变化,求温度计的误差。
解:min 25.0min 14=⇒=T T 传递函数125.01)(+=Φs stt r 10)(=425.025.01)125.0(10)()()(22++-=+=⋅Φ=s sss s s R s s C tet t c 45.25.210)(-+-=C t c t r t e e s s ss ︒=-==∞→∞→5.2)()(lim )(lim3-4 单位负反馈系统的开环传递函数为)1(1)(+=s s s G ,求该系统的上升时间r t 、峰值时间p t 、超调量%σ和调整时间s t 。
解:11)(2++=Φs s s12=n ξω,12=n ω.3arccos ,5.0,1πξβξω====⇒n 。
%16%100%,63.31,42.2121/22=⨯==-==--=--ξπξσξωπξωβπe t t n p n r%)2(84%),5(63=∆===∆==ns ns t t ξωξω3-6 系统的单位阶跃响应为tteet c 10602.12.01)(---+=,试求:(1) 系统的闭环传递函数;(2) 系统的阻尼比ξ和无阻尼自然振荡频率n ω。
解:(1)ss R s s ss C 1)(,102.1602.01)(=+-++=60070600)(2++=Φs s s(2) 702=n ξω,6002=n ω.43.1,5.24==⇒ξωn3-7 设单位负反馈二阶系统的单位阶跃响应曲线如图所示, 试确定其开环传递函数。
解:%30%100)13.1(%100%21/=⨯-=⨯=--ξπξσe6.33,356.01.012==⇒=-=n n p t ωξξωπ)9.23(1.1129)2()(2+=+=s s s s s G n nξωω3-8 单位负反馈系统的开环传递函数)1()(+=Ts s K s G 。
当)()(t t r ε=时,系统的动态性能指标%30%≤σ,%)5(3.0=∆≤s t s ,试选择参数K 及T 值。
解:TK s Ts TKKs TsK s ++=++=Φ1)(22TKTK TK Tn n n 21,,122==⇒==ξωωξω3.06,356.021%30%≤=≥⇒≤T t TKs σ5.39,05.0≤≤⇒K T3-11 闭环系统的特征方程如下,试用劳斯判据判断系统的稳定性。
(1)010092023=+++s s s (2)020092023=+++s s s (3)0516188234=++++s s s s (4)012362345=+++++s s s s s(1) Routh :s 3 1 9 s 220 100 s 1 4 s 0100 第一列同号,所以系统稳定。
(2) Routh :s 3 1 9 s 220 200s 1 -1s 0 200 第一列变号,所以系统不稳定。
(3) Routh :s4 1 18 5s 3 8 16s 2 16 5s 1 216s 0 5 第一列同号,所以系统稳定。
(4) Routh :s51 3 1s 4 6 2 1s 3 16 5 s 2 2 1s 1 -6s 0 1 第一列变号,所以系统不稳定。
3-12 单位负反馈系统的开环传递函数解:(1)系统特征方程:0401423=+++K s s sRouth : s 3 1 40 s 2 14 K s 1 560-Ks 0K系统稳定,560-K>0,K>0所以:0<K<560)10)(4()(++=s s s Ks G(1) 试确定系统稳定时的K 值范围;(2) 确定使闭环极点的实部不大于-1的K 值范围。
(2)将11-=s s 代入特征方程,得:027151112131=-+++K s s sRouth : s 31 15 s 211 K-27 s 1 192-Ks 0K-27 192-K>0,K-27>0所以:27<K<1923-13 系统结构如图所示,确定系统稳定时τ的取值范围。
解:开环传递函数:)101()1(10)(2τ+++=s s s s G特征方程:01010)101(23=++++s s s τRouth : s 3 1 10s 2τ101+ 10 s 1τ10s 0 10 系统稳定,010>τ,即0>τ3-16 单位反馈控制系统的开环传递函数如下。
试求各系统的静态位置误差系数p K 、速度误差系数v K 和加速度误差系数a K ,并确定当输入信号分别为2,2 ),()(t t t t r ε=和221t t ++时系统的稳态误差ss e 。
(1) )12.0)(11.0(20)(++=s s s G (2) )10)(2(200)(++=s s s s G解:(1)0)(lim ,0)(lim ,20)(lim 2======→→→s G s K s s G K s G Ks a s v s p∞====+==ss pss e t t r t t r Ke t t r 时,型系统,2)(,2)(;21111),()(0ε∞=++=ss e t t t r 时,221)((2)0)(lim ,10)(lim ,)(lim 2====∞==→→→s G s K s s G K s G K s a s v s pI 型系统 ∞======+==ss vss pss e t t r K V e t t r Ke t t r 时,2)(,2.0,2)(;011),()(ε∞=++=ss e t t t r 时,221)((3) )104()12(10)(22+++=s s s s s G (4) )2)(12()13(5)(2+++=s s s s s G(3)1)(lim ,)(lim ,)(lim 2==∞==∞==→→→s G s K s s G K s G Ks a s v s pII 型系统 2)(,0,2)(;011),()(2=======+==ass vss pss K A e t t r K V e t t r Ke t t r 时,ε221)(2=++=ss e t t t r 时,(4)由劳斯判据知系统不稳定,故不存在稳态误差。
3-17 闭环系统的结构如图所示。
(1) 当ss R 1)(=,超调量%20%=σ,调整时间%)5(8.1=∆=s t s 时,试确定参数1K 和τ的值;(2) 当输入信号分别为 ,)( ),()(t t r t t r =ε=221)(t t r =时,求系统的稳态误差。
解:(1)系统开环传递函数)()(11τK s s K s G +=闭环传递函数1121)(K s K s K s ++=Φτ65.38.13,456.0%20%100%21/=⇒===⇒=⨯=--n ns t eωξωξσξπξ25.04.13,33.32211=⇒====τωξωτn n K K(2)系统为I 型系统,)29.3(7.13)(+=s s s G开环增益为16.429.37.13==K∞=======ss e t t r t t r t t r ,21)(,24.016.41e ,)(,0e ,)()(2ss ss 时时时ε3-18 系统结构如图所示,试确定使阻尼比7.0=ξ和单位斜坡函数 输入时稳态误差25.0=ss e 的参数K 和τ的取值。
解: )K 2(K )(τ++=s s s G25.02212)(=+=+=+=KK KK e KK t t r ss τττ,时,开环增益为:K K n n τξωω+==22,186.0,36.31==⇒τK3-19 系统结构如图所示,其中)()()()(21t t d t d t r ε===。
试求:(1) 在)(t r 作用下系统的稳态误差;(2) 在)(1t d 和)(2t d 同时作用下系统的稳态误差; (3) 在)(1t d 作用下,且sK K s G p+=)(1和Jss F 1)(=时,系统的稳态误差。
解:(1)r(t)作用时,令0)()(21==t d t d )()(11)(s F s G s er +=Φ,ss R 1)(=,则))()(1(1)()()(s F s G s s R s s E er +=Φ=)0()0(11)(lim 0F G s sE e s ss +==→(2) )(),(21t d t d 作用时,令0)(=t r )()(1)()(1s F s G s F s ed +-=Φ,)()(11)(1s F s G s ed +-=Φ))()(1()(1))()()()(()(2211s F s G s s F s D s s D s s E ed ed +--=Φ+Φ=)0()0(1)0(1)(lim 0F G F s sE e s ss ++-==→(3)01)(11lim)()(lim )(lim 0110=++-=Φ==→→→Jss K KJs s D s s s sE e ps ed s s ss3-20 图示复合控制系统中bs as s G c +=2)(,)102.0)(11.0(10)(++=s s s s G ,试选择a 和b 的值,使系统由I 型系统的无差度提高为III 型系统的无差度。
解: 10)102.0)(11.0(1010)102.0)(11.0()(1)()(1)(2+++--++=+-=Φs s s bsass s s s G s G s G s c er要想系统误差度为III 型系统无差度,则需要当31)(ss R =时,稳态误差零。
10)102.0)(11.0(101012.0002.01lim)()(lim 2232+++--++⋅=Φ=→→s s s bsass s s ss s sR e s er s ss令0101,01012.0=-=-b a 得1.0,012.0==b a3-21 系统结构如图(a)所示,(1) 若)(,1)()(,0)(,1)(3212s G s G s G s D ss R ====为一阶环节,输出响应曲线如图(b)所示,求)(3s G ; (2) 若ss G s s G s K s G t t d t t r 25.0)(,18)(,12.0)(),(2)(,)(321=+=+=ε-==,试求当1=K 和5=K 时系统的稳态误差。
(a)(b)解:(1)设系统闭环传递函数为1)(+=ΦTs K s ,由输出响应曲线知,。