第三章控制系统的时域分析法知识点
- 格式:pdf
- 大小:232.65 KB
- 文档页数:7

16第三章 控制系统的时域分析法一.基本内容1. 了解规定典型输入信号的意义;2. 熟练掌握一阶、二阶系统暂态响应及暂态性能指标的计算;3. 了解高阶系统的组成、阶跃响应及其与闭环零点、极点的关系;掌握闭环主导极点的概念,了解用二阶系统响应近似分析高阶系统性能的方法; 4. 了解系统稳定性的概念,熟练掌握线性定常系统稳定的充要条件及劳斯稳定判据; 5. 了解控制系统稳态误差的定义,熟练掌握稳态误差的计算与分析。
二.重点和难点本章的主要内容是通过研究系统的时域响应去评价系统的性能,即稳定性、暂态性能和稳态性能。
1.控制系统的暂态响应控制系统时间响应的暂态分量即暂态响应。
通常以阶跃响应表征系统的暂态性能。
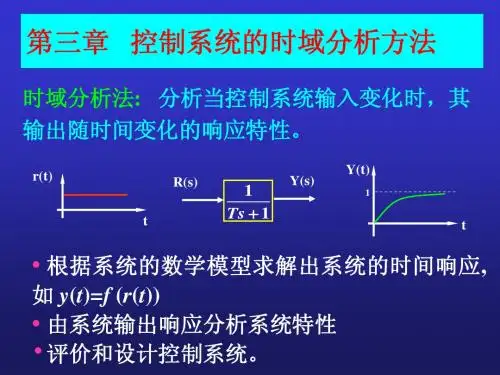
二阶系统的典型传递函数为222222121)()(nn n s s Ts s T S R s C ωζωωζ++=++= 式中 ζ——阻尼比n ω——无阻尼自然振荡角频率,T n 1=ω当10<<ζ时,典型二阶系统的单位阶跃响应为)11sin(111)(222ζζζωζζω-+---=-arctgt et c n tn其单位阶跃响应曲线如图3-1所示 其性能指标:上升时间 21ζωθπ--=n r t (其中ζζθ21-=arctg ,用弧度表示)峰值时间 21ζωπ-=n p t超调量 %10021⨯=--ζζπe M p调节时间 ns t ζω3%)5(≈(或ns t ζω4%)2(≈)17)(t c 1.00.5图3-1典型二阶系统的单位阶跃响曲线对于高阶系统,其暂态响应可以看成是由一阶和二阶系统暂态响应分量组合而成的。
如果系统传递函数中距离虚轴最近的闭环极点,其实部仅有其他极点实部的51或更小一些,并且该闭环极点附近无闭环零点,则可认为系统的响应主要由该极点决定。
这种闭环极点被称为闭环主导极点。
通常系统的主导极点是共轭复数极点,故系统的暂态响应性能也可由相应的二阶系统暂态响应近似估计。
第三章 控制系统的时域分析法
一、知识点总结
1.掌握典型输入信号(单位脉冲、单位阶跃、单位速度、单位加速度、正弦信号)的拉氏变换表达式。
2.掌握系统动态响应的概念,能够从系统的响应中分离出稳态响应分量和瞬态响应分量;掌握系统动态响应的性能评价指标的概念及计算方法(对于典型二阶系统可以直接应用公式求解,非典型二阶系统则应按定义求解)。
解释:若将系统的响应表达成拉普拉氏变换结果(即S 域表达式),将响应表达式进行部分分式展开,与系统输入信号极点相同的分式对应稳态响应;与传递函数极点相同的分式对应系统的瞬态响应。
将稳态响应和瞬态响应分式分别进行拉氏逆变换即获得各自的时域表达式。
性能指标:延迟时间、上升时间、峰值时间、调节时间、超调量
3.掌握一阶系统的传递函数形式,在典型输入信号下的时域响应及其响应特征;掌握典型二阶系统的传递函数形式,掌握欠阻尼系统的阶跃响应时域表达及其性能指标的计算公式和计算方法;了解高阶系统的性能分析方法,熟悉主导极点的概念,定性了解高阶系统非主导极点和零点对系统性能的影响。
tr
tp
ts
td
4.熟悉两种改善二阶系统性能的方法和结构形式(比例微分和测速反馈),了解两种方法改善系统性能的特点。
5.掌握系统稳定性分析方法:劳斯判据的判断系统稳定性的判据及劳斯判据表特殊情况的构建方法(首列元素出现0,首列出现无穷大,某一行全为0);掌握应用劳斯判据解决系统稳定裕度问题的方法。
了解赫尔维茨稳定性判据。
6.掌握稳态误差的概念和计算方法;掌握根据系统型别和静态误差系数计算典型输入下的稳态误差的方法(可直接应用公式);了解消除稳态误差和干扰误差的方法;了解动态误差系数法。
二、相关知识点例题
例1. 已知某系统的方块图如下图1所示,若要求系统的性能指标为:
δδ%=2222%,tt pp=1111,试确定K和τ的值,并计算系统单位阶跃输入下的特征响应量:tt,tt。
图1
解:系统闭环传递函数为:Φ(s)=CC(ss)RR(ss)=KK ss2+(1+KKKK)ss+KK
因此,ωnn=√KK,ζζ=1+KKKK2√KK,
δ%=e−ππππ�1−ππ2⇒ζζ=0.46,
t pp=ππωωdd=1ss⇒ωdd=ωnn�1−ζζ2=3.14 ⇒ωnn=3.54
K=ωnn2=12.53,τ=2ζζωnn−1KK=0.18
t ss=3ζζωωnn=1.84ss
例2.劳斯判据应用的三种特例处理方法及关于稳定度的计算示例(1)劳斯表某行出现全为零的情况:某系统的特征方程为ss5+ss4+3ss3+3ss2+2SS+2=0,试判断系统的稳定性。
解:列出系统的劳斯表如下
S5 1 3 2
S4 1 3 2
S3 0 0
由于S3行出现全为零的情况,劳斯表运算无法进行,此时,可以应用上一行,即S4行所在系数构建辅助方程:Q(s)=ss4+3ss2+2,将辅助方程对S求一阶导数后所得方程(即ddQ(s)ddss=4ss3+6ss)的系数作为行的劳斯表系数继续运算,则劳斯表表示为:
S5 1 3 2
S4 1 3 2
S3 4 6
S2 3/2 2
S1 2/3
S0 2
由于劳斯表首列系数均大于零,所以原系统稳定。
(2)劳斯表某行首个元素为零的情况:某系统特征方程为ss4+2ss3+ss2+2ss+1=0,判断系统的稳定性。
解:解:列出系统的劳斯表如下
S4 1 1 1
S3 2 2 0
S2 0 1
由于S2行出现首个元素为零的情况,劳斯表运算无法进行,此时,可以用无穷小的正数“ε”代替“0”继续运算。
如下所示:
S4 1 1 1
S3 2 2 0
S2ε 1
S1 1-2/ε
S0 1
由于1-2/ε<0,所以劳斯表首列元素出现2次符号变更,因此,原系统不稳定,有2个不稳定根。
(3)劳斯表某行首个元素出现∞的情况:某系统特征方程为ss3−3ss+2=0,分析系统的稳定性情况。
解:根据系统稳定的必要条件,即闭环特征方程各系统必须同号且不缺项,该系统肯定不稳定,但尚需要通过劳斯表判断其不稳定根的个数。
列出劳斯表如下:
S3 1 -3
S2 0 2
S1∞
由于S1所在行出现了∞,所以劳斯表无法继续,此时可通过乘以一个具有负零点因式(即S+a的形式,a>0)的方式重构新的特征方程,例
如,可将原特征方程乘以(S+3),得到ss4+32ss3−3ss2−7ss+6=0,对此时进行劳斯表判别,结果如下:
S4 1 -3 6
S3 3 -7 0
S2 -2/3 6
S1 20
S0 6
由上可知,原系统有2个不稳定根。
(4)已知某系统的闭环特征方程为:ss3+12ss2+47ss+60=0,试判断系统的所有特征根是否位于s=-2的左侧(即稳定裕度为2)。
应用劳斯判据判断稳定裕度问题可以转变为坐标平移问题,即建立新的坐标系,使s=-2成为新坐标系的纵坐标。
引入新变量S1,令s+2=S1。
则原闭环特征方程可表示为关于S1的方程:SS13+6SS12+11SS1+6=0,列出该方程的劳斯表,判断在新坐标系下是否稳定即可:
S3 1 11
S2 6 6
S1 10
S0 6
可以原系统稳定,即系统的所有特征根是否位于s=-2的左侧。
例3.已知系统的结构图如下图2所示,若系统响应最终以ω=2的频率振荡,试确定系统的参数K和a的值。
图2
解:系统的特征方程为:ss3+aass2+(KK+2)ss+KK+1=0
列出劳斯表如下:
S3 1 K+2
S2 a K+1
S1KK+1−aa(KK+2)
aa
S0 K+1
由题意可知,系统以ω=2的频率振荡,说明出现了虚部为2的纯虚根,根据劳斯表特性,对应S的奇数次项所在行出现了全为零的情况,本题对应S1项所在行全为零。
即KK+1−aa(KK+2)
aa=0(1)
对应的辅助方程为:
aass2+KK+1=0⇒其中复数闭环极点为:ss1,2=±jj�KK+1aa=±jj2即:KK+1aa=4(2)
结合(1)和(2),可求得a=0.75,K=2。
例4.某系统的结构框图如图3所示,为保证系统闭环阻尼比ζ=0.7,单位斜坡函数响应的稳态误差e ss=0.25,试确定参数K、τ的值。
图3
解:将原系统简化成如下形式
可知系统的开环传递函数为:G(s)=KK ss(ss+KKKK+2)=KK/(KKKK+2)
ss(1KKKK+2ss+1)
根据系统单位斜坡稳态误差要求可得:ee ssss=1KK/(KKKK+2)=KKKK+2KK=0.25 (1)
系统的闭环传递函数为:Φ(s)=KK
ss+(KKKK+2)ss+KK
可知是一个标准的二阶系统,可得关系式:2ζωωnn=KKKK+2,KK=ωωnn2(2) 结合式(1)和式(2)可解得:KK=0.186,KK=31.36。