工业机器人腕部结构设计教材
- 格式:pptx
- 大小:698.63 KB
- 文档页数:21
1前言1.1机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。
可分固定式和移动式两类。
1.1.2驱动单元它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。
1.1.3控制装置它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。
1.1.4人工智能系统关节型机器人腕部结构设计它由两部分组成,一部分是感觉系统,另一部分为决策-规划智能系统。

![工业机器人4[1].3_臂部手腕设计](https://uimg.taocdn.com/1040630169eae009581bec96.webp)

摘要机器人技术是一门综合学科,包含有机械设计、机械原理、电子设计、软件工程、材料科学、以及仿生学等一系列基础学科。
作为现代化高新技术,其应用于各式各样的场合,尤其突出的是在制造领域中的应用。
机械制造业的基本发展方向是既要增加产品数量,又要提高产品质量,同时还要降低成本。
机器人技术恰恰能够较好的处理好制造业中这几个方面的问题,它把人类从完成机械重复的枯燥劳动中解放出来,补充了对简单劳动各种增长的需要。
本毕业设计概述了工业机器人的分类、历史、以及发展趋势。
探讨了用于金属切削机床的M10型工业机器人的总体结构和手腕转动机构。
重点在对于手腕转动组件的分析与设计,首先是原理分析,其次是其各个部件作用,最后对于其主要零部件进行了设计,包括计算、结构等方面的问题。
例如轴承选用、轴的设计、蜗杆传动的选择。
关键词:工业机器人;机械制造;机器人总体结构;手腕转动机构AbstractRobot technology is a comprehensive discipline,it includes mechanical design, mechanical principle, electronics design, software engineering, materials science, and bionics and so on a series of basic subjects.As a modern technology, its application in a wide variety of situations, especially the application in the field of manufacturing.the basic direction of machinery manufacturing industry is to increase the product quantity, and to improve the quality of products, but also reduce the cost.The robot technology can well handle the problems in the manufacturing industry.It freed mankind from the dull work of the mechanical repetition and added the needs of the various growth in simple labor.This graduation design outlines the classification, history, and development trend of industrial robots.The overall structure and wrist institutions of the type M10 industrial robots which used for metal cutting machine tools is discussed.Focuses on the analysis and design for the wrist rotation components, first is the principle analysis, the second is its role in components, finally is the design of the main components, including calculation, structure and other aspects. Such as bearing selection, shaft design, selection of worm drive shaft.Keywords:Industry robot;Machinery manufacturing;General structure of robot;Wrist institutions.目录第一章前言 (1)1.1 工业机器人概述 (1)1.2 工业机器人驱动方式 (1)1.2.1 气动式工业机器人 (1)1.2.2 液压式工业机器人 (1)1.2.3 电动式工业机器人 (2)1.3 工业机器人的分类 (2)1.3.1 按承载能力分 (2)1.3.2 按生产形式分 (2)1.4 工业机器人的历史 (3)1.5 工业机器人的技术现状和发展趋势 (5)1.5.1 工业机器人的技术现状 (5)1.5.2 工业机器人的发展趋势 (5)第二章工业机器人总体结构设计 (7)2.1 工业机器人设计内容与要求 (7)2.1.1 工业机器人在制造领域主要作用 (7)2.1.2 工业机器人主要设计内容 (7)2.2 工业机器人的总体设计 (7)2.2.1 M10型工业机器人总体结构图 (8)2.2.2 M10型工业机器人主要设计参数 (8)2.3 工业机器人的驱动方式选择 (9)2.4 工业机器人的运动学分析 (12)2.4.1 M10型工业机器人运动学简图 (12)2.4.2 M10型工业机器人运动分析 (13)2.4.3 结合运动学简图和总体结构图的综合分析 (13)2.5 工业机器人的材料选择 (13)2.5.1 材料选择的基本要求 (13)2.5.2 结构材料介绍 (14)第三章手腕转动机构设计 (16)3.1 工业机器人手腕介绍 (16)3.1.1 设计要求 (16)3.1.2 手腕的结构 (17)3.2 手腕转动机构Ⅰ运动分析和电动机的选择 (19)3.2.1 手腕转动机构Ⅰ结构图 (19)3.2.2 运动分析 (19)3.3 电动机的选择 (19)3.3.1 选择电动机类型 (19)3.3.2 选择电动机的容量 (20)3.3.3 确定电动机转速 (20)3.4 手腕转动机构Ⅱ气动原理和运动结构分析 (21)3.4.1 手腕转动机构气动原理图 (21)3.4.2 气动原理图分析 (21)3.4.3 结构图 (22)3.4.4 运动分析 (22)3.5 手腕转动机构轴承和键的选择 (22)3.5.1 常用轴承类型及选择 (22)3.5.2常用轴承类型及选择 (23)3.5.3 键的选择 (28)第四章典型零件设计 (29)4.1 轴的设计与校核 (29)4.1.1 轴用途及分类 (29)4.1.2 轴设计的主要内容 (29)4.1.3 轴的结构设计 (29)4.1.4 轴的强度校核计算 (30)4.2 蜗杆传动的选择 (35)4.2.1 蜗杆传动的介绍 (35)4.2.2 蜗杆传动的类型 (35)4.2.3 蜗杆传动主要参数介绍 (36)4.2.4 涡轮蜗杆参数选择 (38)第五章结论 (42)参考文献 (43)致谢 (44)第1章前言1.1工业机器人概述工业机器人是一种模拟人手臂、手腕和手功能的机电一体化装置,其应用领域分为很多种类,从常用的机器人系列和市场占有率来看,焊接、装配、搬运、上料/卸料、铸造、冲压和喷漆是主要的工业机器人品种。
第三章机器人的机械结构系统3.3机器人腕部结构【内容提要】本课主要学习工业机器人腕部结构。
介绍机器人腕部的三种运动、两种转动;机器人腕部的自由度;腕部的驱动方式;机器人的柔顺腕部以及机器人腕部典型结构。
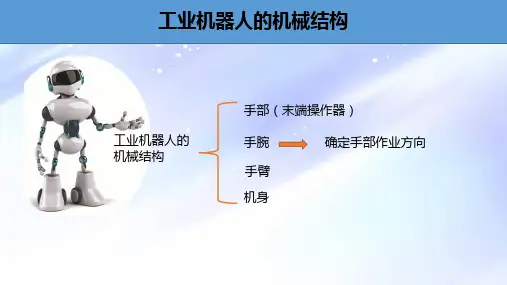
知识要点:✓机器人腕部分类✓手腕的自由度✓手腕的驱动方式✓柔顺腕部✓腕部典型结构重点:✓掌握机器人腕部的分类✓掌握机器人手腕的自由度✓掌握机器人手腕的驱动方式✓掌握机器人腕部典型结构难点:✓掌握机器人腕部的分类✓机器人腕部典型结构关键字:✓手腕、柔顺腕部、腕部自由度【本课内容相关资料】3.3机器人腕部结构腕部是连接机器人的小臂与末端执行器(臂部和手部)之间的结构部件,其作用是利用自身的活动度来确定手部的空间姿态,从而确定手部的作业方向。
对于一般的机器人,与手部相连接的腕部都具有独驱自转的功能,若腕部能在空间取任意方位,那么与之相连的手部就可在空间取任意姿态,即达到完全灵活。
多数将腕部结构的驱动部分安排在小臂上。
腕部是臂部与手部的连接部件,起支承手部和改变手部姿态的作用。
目前,RRR型三自由度腕部应用较普遍。
3.3.1机器人腕部的转动方式1.腕部的运动机器人一般具有6个自由度才能使手部(末端执行器)达到目标位置和处于期望的姿态。
为了使手部能处于空间任意方向,要求腕部能实现对空间3个坐标轴x,y,z的旋转运动,如图3-15所示。
这便是腕部的3个运动:腕部旋转、腕部弯曲、腕部侧摆,或称为3个自由度。
(1)腕部旋转腕部旋转是指腕部绕小臂轴线的转动,又叫做臂转。
有些机器人限制其腕部转动角度小于360°。
另一些机器人则仅仅受到控制电缆缠绕圈数的限制,腕部可以转几圈。
如图3-15a 所示。
a)臂转b)手转c)腕摆d)腕部坐标系图3-15腕部的三个运动和坐标系(2)腕部弯曲腕部弯曲是指腕部的上下摆动,这种运动也称为俯仰,又叫做手转。
如图3-15b所示。
(3)腕部侧摆腕部侧摆指机器人腕部的水平摆动,又叫做腕摆。