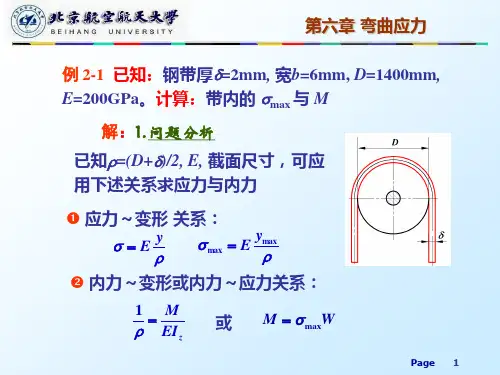
第六章弯曲应力1
- 格式:pdf
- 大小:1.05 MB
- 文档页数:40

第六章弯曲变形知识要点1、弯曲变形的概念1)、挠曲线弯曲变形后梁的轴线变为挠曲线。
平面弯曲时,挠曲线为外力作用平面内的平面曲线。
2)、平面弯曲时的变形在小变形情况下,梁的任意二横截面绕各自的中性轴作相对转动,杆件的轴线变为平面曲线,其变形程度以挠曲线的曲率来度量。
1》纯弯曲时,弯矩—曲率的关系(由上式看出,若弯曲刚度EI为常数则曲率为常数,即挠曲线为圆弧线)2》横力弯曲时,弯矩—曲率的关系3)、平面弯曲时的位移1》挠度——横截面形心在垂直于梁轴线方向上的线位移,以表示。
2》转角——横截面绕其中性轴旋转的角位移,以表示。
挠度和转角的正负号由所选坐标系的正方向来确定。
沿y轴正方向的挠度为正。
转角的正负号判定规则为,将x轴绕原点旋转90°而与y轴重合,若转角与它的转向相同,则为正,反之为负。
4)、挠曲线近似微分方程5)、受弯曲构件的刚度条件,2、积分法求梁的挠度和转角由积分常数C、D由边界条件和连续性条件确定。
对于梁上有突变载荷(集中力、集中力偶、间断性分布力)的情况,梁的弯矩M(x)不是光滑连续函数,应用上式时,应分段积分,每分一段就多出现两个积分常数。
因此除了用边界条件外,还要用连续性条件确定所有的积分常数。
边界条件:支座对梁的位移(挠度和转角)的约束条件。
连续条件:挠曲线的光滑连续条件。
悬臂梁边界条件:固定端挠度为0,转角为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等简支梁边界条件:固定绞支座或滑动绞支座处挠度为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等连接铰链处,左右两端挠度相等,转角不等3、叠加原理求梁的挠度和转角1)、叠加原理各载荷同时作用下梁任一截面的挠度和转角等于各个载荷单独作用时同一截面挠度和转角的代数和。
2)、叠加原理的限制叠加原理要求梁某个截面的挠度和转角与该截面的弯矩成线性关系,因此要求:1》弯矩M和曲率成线性关系,这就要求材料是线弹性材料2》曲率与挠度成线性关系,这就要求梁变形为小变形4、弯曲时的超静定问题——超静定梁1)、超静定梁约束反力数目多于可应用的独立的静力平衡方程数的梁称为超静定梁,它的未知力不能用静力平衡方程完全确定,必须由变形相容条件和力与变形间的物理关系建立补充方程,然后联立静力平衡方程与补充方程,求解所有的未知数。
第六章 弯曲变形分析梁是机械与工程结构中最常见的构件。
本章内容包括梁的内力、平面弯曲中横截面上的正应力和切应力分布规律,以及梁的变形计算。
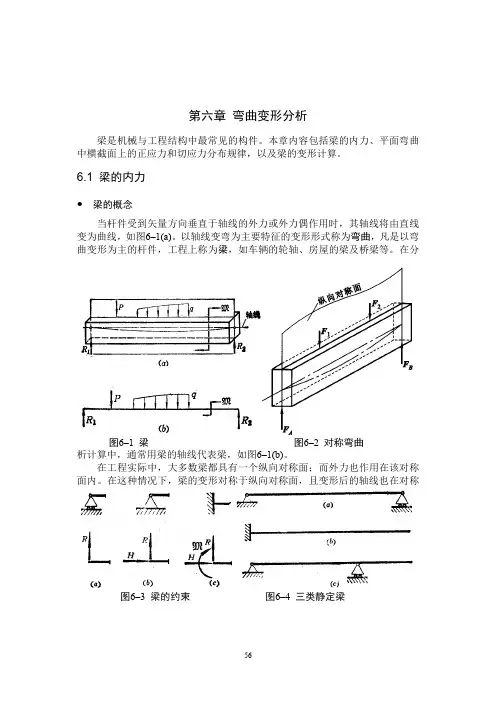
6.1 梁的内力● 梁的概念当杆件受到矢量方向垂直于轴线的外力或外力偶作用时,其轴线将由直线变为曲线,如图6–1(a)。
以轴线变弯为主要特征的变形形式称为弯曲,凡是以弯曲变形为主的杆件,工程上称为梁,如车辆的轮轴、房屋的梁及桥梁等。
在分析计算中,通常用梁的轴线代表梁,如图6–1(b)。
在工程实际中,大多数梁都具有一个纵向对称面;而外力也作用在该对称面内。
在这种情况下,梁的变形对称于纵向对称面,且变形后的轴线也在对称图6–1 梁 图6–2 对称弯曲图6–3 梁的约束 图6–4 三类静定梁面内,即所谓的对称弯曲,如图6–2。
它是弯曲问题中最基本、最常见的情况。
本章只讨论梁的对称弯曲。
图6–3表示了梁的三种常见约束形式及相应的约束力:可动铰支座(图6–3(a)),固定铰支座(图6–3(b))和(平面)固定端约束(图6–3(c))。
在以上三种约束方式下,有三种常见的梁形式,如图6–4所示。
图6–4(a)为简支梁,两端分别为固定铰支座和活动铰支座;图6–4(b)为悬臂梁,一端固定端约束,一端自由;图6–4(b)为外伸梁,它是具有一个或两个外伸部分的简支梁。
这三种梁都是静定梁。
作用在梁上的外载荷,常见的有集中力偶M (图6–5(a))、分布载荷q (图6–5(b))和集中力F (图6–5(c))。
在实际问题中,q 为常数的均布载荷较为常见。
● 梁的剪力与弯矩在4.2中已经介绍了求杆件内力的通用方法,即截面法。
具体到梁,其内力分量为剪力和弯矩,规定当剪力相对于横截面的转向为顺时针为正,使杆件发生上凹下凸的弯矩为正,如图4–5(b)和(c)。
例6–1:如图6–6所示悬臂梁,受均布载荷q ,在B 点处受矩为2qa M =的力偶作用,试绘梁的剪力图与弯矩图。
解:设固定端的约束力和约束力偶为C R 和C M ,则由平衡方程00=-=∑qa R F C y ,qa R C =05.102=--⋅=∑C C M qa qa a m ,221qa M C = 以杆件左端为坐标原点,以B 为分界面,将梁分为AB 和BC 两段。

第六章 弯曲应力1.图示梁的材料为铸铁,截面形式有四种如图:最佳形式为 。
2.为了提高梁的承载能力,对同一梁、相同的均布载荷q ,下列哪一种支承条件下,梁的强度最好: 正确答案是 。
3.设计钢梁时,宜采用中性轴为( )的截面;设计铸铁梁时,宜采用中性轴为( )的截面。
正确答案是 。
(A) 对称轴 (B) 偏于受拉边的非对称轴 (C) 偏于受压边的非对称轴 (D) 对称或非对称轴4.梁在弯曲时,横截面上正应力沿高度是按 分布的;中性轴上的正应力为 ;矩形截面梁横截面上剪应力沿高度是按 分布的,中性轴上的剪应力为 。
5.矩形截面梁若max Q 、m ax M 和截面宽度b 不变, 而将高度增加一倍,则最大弯曲正应力为原来的倍,最大弯曲剪应力为原来的 倍。
6.图示正方形截面简支梁,若载荷不变, 而将边长增加一倍,其则最大弯曲正应力为原来的 倍,最大弯曲剪应力为原来的 倍。
(A) (B) (C) (D)(C)(B)(D)7.下图所示的梁跨中截面上A 、B 两点的应力A σ= ;A τ= ;B τ= 。
8.图示T 字形截面梁。
若已知A —A 截面上、下表面处沿x 方向的线应变分别是0004.0-='ε,0002.0=''ε,则此截面中性轴位置=c y h (C 为形心)9.铸铁丁字形截面梁的许用应力分别为:许用拉应力 [t σ] = 50MPa ,许用压应力[c σ] = 200 MPa 。
则上下边缘距中性轴的合理比值为 21/y y 为多少?(C 为形心)10.⊥形截面铸铁悬臂梁,尺寸及载荷如图所示。
若材料的拉伸许用应力[]MPa l 40=σ,压缩许用应力[]MPa c 160=σ,截面对形心轴z c的惯性矩410180cm zc=I ,cm h 64.91=,试计算该梁的许可载荷P 。
11.正方形截面简支梁,受有均布载荷作用如图,若[σ] = 6 [τ] ,证明当梁内最大正应力和最大剪应力同时达到许用应力时,l / a = 6xA-ABc12.铸铁制梁的尺寸及所受载荷如图所示。
6-3、图示矩形截面梁受集中力作用,试计算1-1横截面上a 、b 、c 、d 四点的正应力。
解:(1)外力分析,判变形。
荷载在纵向对称面内,与轴线垂直,梁发生平面弯曲。
中性轴z 轴过形心C 与载荷垂直,沿水平方向。
(2)内力分析,弯矩图如图(b )所示,1-1横截面的弯矩为:1115230(M -=-⨯=-⋅kN m)(3)应力分析,梁上边有弯矩图,上侧纤维受拉。
1-1横截面上的a 点处于拉伸区,正应力为正;c 点处于中性层上,正应力为零;b 、d 两点处于压缩区,正应力为负。
3111111max2301011.1110.1800.36a a zzzM M M y y I I W σ---⨯=⋅=⋅===⨯⨯Pa MPa 。
11.11b a σσ=-=-MPa0c σ= 31133010(0.1500.050)7.4110.1800.312d d zM y I σ-⨯=-⋅=-⨯-=-⨯⨯Pa MPa37M kN V 图(kN)(a)(c)(b)(c)(e)(d)2+q l /8MkN ·m)(f)(b)180q题6-3图 题6-5图6-5、两根矩形截面简支木梁受均布荷载q 作用,如图所示。
梁的横截面有两种情况,一是如图(b)所示是整体,另一种情况如图(c)所示是由两根方木叠合而成(二方木间不加任何联系且不考虑摩擦)。
若已知第一种情况整体时梁的最大正应力为10MPa ,试计算第二种情况时梁中的最大正应力,并分别画出危险截面上正应力沿高度的分布规律图示。
解:(1)外力分析,判变形。
荷载在纵向对称面内,与轴线垂直,梁发生平面弯曲。
第一种情况中性层为过轴线的水平纵向面,中性轴z 轴过整体形心C 与载荷垂直,沿水平方向。
而第二种情况,两根木梁以各自的水平纵向面为中性层发生弯曲,两根中性轴为与荷载垂直的水平形心主轴。
如图所示。
(2)内力分析,判危险面:弯矩图如图(b )所示,跨中截面为危险面。
一次弯曲应力
弯曲应力是指当物体受到外力作用而发生弯曲变形时,在其内部产生的应力。
一次弯曲应力通常是指物体在一次性的外力作用下发生的弯曲变形所产生的应力。
弯曲应力的大小与物体的几何形状、材料的弹性模量以及外力的大小和作用方式有关。
在工程应用中,弯曲应力的计算是一个重要的问题,因为它直接关系到结构的强度和稳定性。
弯曲应力的计算公式为:σ= My / I,其中σ表示弯曲应力,M表示弯矩,y表示距离中性轴的距离,I表示截面惯性矩。
通过这个公式,可以计算出在给定的外力作用下,物体内部的弯曲应力分布情况,从而评估其结构的安全性和可靠性。
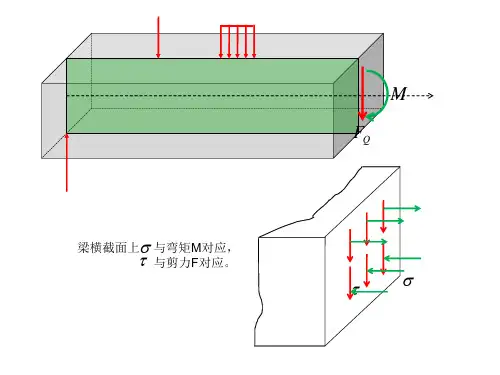
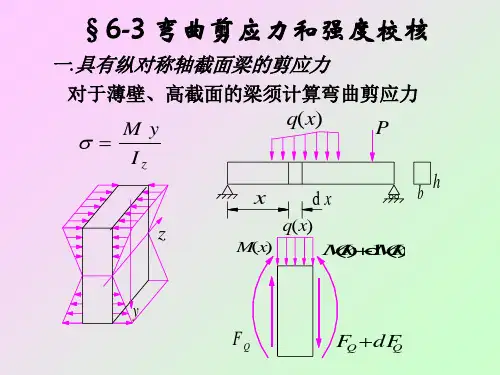
第六章 弯曲应力和强度1、 纯弯曲时的正应力 横力弯曲时,0≠=Q dxdM。
,纯弯曲时,梁的横截面上只有弯曲正应力,没有弯曲剪应力。
根据上述实验观察到的纯弯曲的变形现象,经过判断、综合和推理,可作出如下假设: (1)梁的横截面在纯弯曲变形后仍保持为平面,并垂直于梁弯曲后的轴线。
横截面只是绕其面内的某一轴线刚性地转了一个角度。
这就是弯曲变形的平面假设。
(2)梁的纵向纤维间无挤压,只是发生了简单的轴向拉伸或压缩。
(2)物理关系根据梁的纵向纤维间无挤压,而只是发生简单拉伸或压缩的假设。
当横截面上的正应力不超过材料的比例极限P ρ时,可由虎克定律得到横截面上坐标为y 处各点的正应力为y EE ρεσ==该式表明,横截面上各点的正应力σ与点的坐标y 成正比,由于截面上ρE为常数,说明弯曲正应力沿截面高度按线性规律分布,如图所示。
中性轴z 上各点的正应力均为零,中 性轴上部横截面的各点均为压应力,而下部各点则均为拉应力。
(3)静力关系截面上的最大正应力为zI My maxmax =σ 如引入符号m axy I W zz =则截面上最大弯曲正应力可以表达为zW M=max σ 式中,z W 称为截面图形的抗截面模量。
它只与截面图形的几何性质有关,其量纲为[]3长度。
矩形截面和圆截面的抗弯截面模量分别为: 高为h ,宽为b 的矩形截面:621223maxbh h bh y I W zz ===直径为d 的圆截面:3226433maxd d d y I W z z ∏=∏==至于各种型钢的抗弯截面模量,可从附录Ⅱ的型钢表中查找。
若梁的横截面对中性轴不对称,则其截面上的最大拉应力和最大压应力并不相等,例如T 形截面。
这时,应把1y 和2y 分别代入正应力公式,计算截面上的最大正应力。
最大拉应力为:zt I My 1)(=σ 最大压应力为:ze I My 2)(=σ 2、横力弯曲时的正应力zI My=σ 对横力弯曲时的细长梁,可以用纯弯曲时梁横截面上的正应力计算公式计算梁的横截面上的弯曲正应力。