三相异步电动机反接制动控制线路PPT
- 格式:ppt
- 大小:1.65 MB
- 文档页数:16
反接制动控制电路
1.反接制动的方法
异步电动机反接制动的方法有两种,一种是在负载转矩作用下使电动机反转的倒拉反转反接制动方法,这种方法不能准确停车,另一种是依靠改变三相异步电动机定子绕组中三相电源的相序产生制动力矩,迫使电动机迅速停转。
当改变电动机定子绕组中三相电源的相序时,就会使电动机产生一个与转子惯性转动方向相反的电磁转矩,使电动机转速迅速下降,电动机制动到接近零转速时,再将反接电源切除。
通常采用速度继电器检测速度的过零点,并及时切除反接电源,以免电动机反向运转。
2.反接制动控制电路分析
单向运行的反接制动控制电路。
在主电路中,接触器KM1用于接通电动机工作相序电源,KM2用于接通反接制动电源。
由于电动机的反接制动电流很大,因此通常在制动时串接电阻R,以限制反接制动电流。
按下启动按钮SB2,KM1线圈得电并自锁,电动机开始运行,当电动机的速度达到速度继电器的动作速度时,速度继电器KS的动合触点闭合,为电动机反接制动做准备。
制动时,按下停止按钮SB1,KM1线圈失电,由于速度继电器KS的动合触点在惯性转速作用下仍然闭合,使KM2线圈得电自锁,电动机实现反接制动。
当其转子的转速小于100r/min时,KS的动合触点复位断开,KM2线圈失电,制动过程结束。

实验十一三相异步电动机的反接制动
一、实验目的
1. 了解各电器元件的性能、质量、工作原理及使用方法。
2. 熟悉三相异步电动机采用电源反接制动的控制原理及接线方法。
3. 了解反接制动的制动效果。
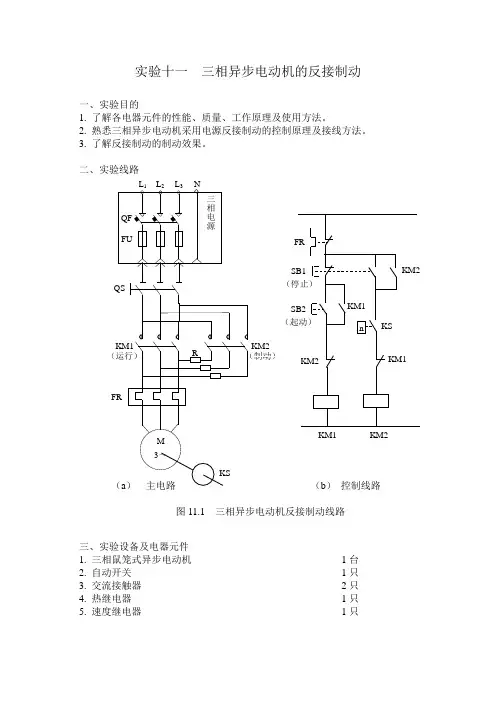
二、实验线路
三、实验设备及电器元件
1. 三相鼠笼式异步电动机1台
2. 自动开关1只
3. 交流接触器2只
4. 热继电器1只
5. 速度继电器1只
6. 制动电阻3只
7. 转速表1只
8. 电工工具及导线
四、实验步骤
1. 了解速度继电器的工作原理和使用方法。
2. 了解制动电阻的作用及大小配置。
3. 按图11.1仔细正确地接好线路,先自查无误后,请指导老师复查,方可通电实验。
4. 按下SB2,让电动机正常运行起来。
5. 按停止按钮SB1使电动机进入反接制动停车,注意观察电动机反接制动情况,用转速表观察电动机转速以及速度继电器动作时的转速。
6. 熟悉该制动电路的故障分析及排除方法。
五、思考题
1. 当按钮SB1没有按到底时,会出现什么情况?
2. 制动电阻R的大小对制动有什么影响?
3. 实验中曾发生何种故障?什么原因?是如何分析排除的?。

三相异步电动机的制动控制-反接制动反接制动是通过改变电动机定子绕组三相电源的相序,产生一个与转子惯性转动方向相反的旋转磁场,因而产生制动转矩。
反接制动时,转子与定子旋转磁场的相对转速接近电动机同步转速的两倍,所以定子绕组中流过的反接制动电流相当于全压直接启动时的两倍,因此反接制动转矩大,制动迅速。
为了减小冲击电流,通常在电动机定子绕组中串接制动电阻。
另外,当电动机转速接近零时,要及时切断反相序电源,以防电动机反方向启动,通常用速度继电器来检测电动机转速并控制电动机反相序电源的断开。
1.单向运行反接制动下图所示为单向运行反接制动控制线路,接触器 KM 控制接触器单向运行,接触器KM2为反接制动,KS为速度继电器,R为反接制动电阻。
工作过程:接通开关QS,按下启动按钮SB2,接触器KM1通电,电动机M启动运行,速度继电器KS常开触头闭合,为制动作准备。
制动时按下停止按钮SB1,KM1断电,KM2通电(KS常开触头未打开),KM2主触头闭合,定子绕组串入限流电阻R进行反接制动,当M的转速接近0时,KS常开触头断开,KM2断电,电动机制动结束。
2.可逆运行反接制动控制线路下图所示为可逆运行反接制动控制线路,KM1为正转接触器,KM2为反转接触器, KM3为短接电阻接触器,KA1、KA2、KA3为中间继电器,KS1为正转常开触头,KS2为反转常开触头,R为启动与制动电阻。
电动机正向启动和停车反接制动过程如下。
(1)正向启动时,接通开关QS,按下启动按钮SB2,KM1通电自锁,定子串入电阻R正向启动,当正向转速大于120r/min时,KS1闭合,因KM1的常开辅助触点已闭合,所以KM3通电将R短接,从而使电动机在全压下运转。
(2)停止运行时,按下停止按钮 SB1,接触器 KM1、KM3 相继失电,定子切断正序电源并串入电阻R,SB1的常开触头后闭合,KA3通电,常闭触点又再次切断KM3电路。
由于惯性,KS1仍闭合,且KA3(18-10)已闭合,使KA1通电,触点KA1(3-12)闭合,KM2通电,电动机定子串入R进行反接制动;KA1的另一触点(3-19)闭合,使KA3仍通电,确保KM3始终处于断电状态,R始终串入M的定子绕组。
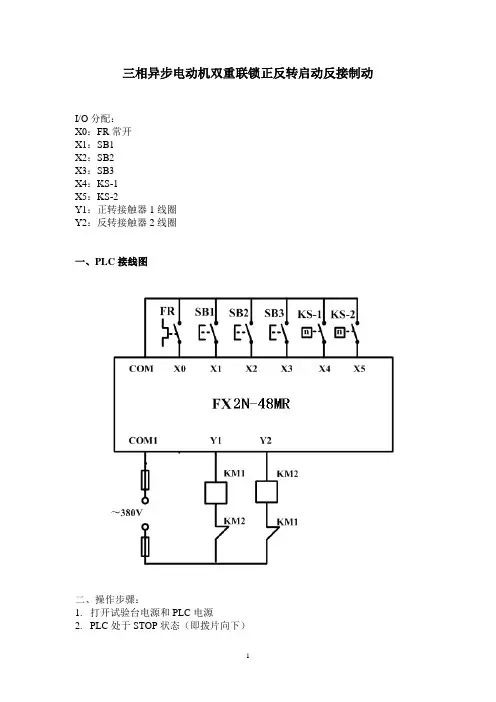
三相异步电动机双重联锁正反转启动反接制动I/O分配:
X0:FR常开
X1:SB1
X2:SB2
X3:SB3
X4:KS-1
X5:KS-2
Y1:正转接触器1线圈
Y2:反转接触器2线圈
一、PLC接线图
二、操作步骤:
1.打开试验台电源和PLC电源
2.PLC处于STOP状态(即拨片向下)
3.打开编程软件FXGPWIN→新文件→PLC类型设置→FX2N
4.画梯形图→转换→保存(文件名及路径不宜用中文,文件名最好以字母
开头,可带上数字;因为C盘有还原,所以文件一定要保存在D盘;文件题头名可随意填)
5.PLC→端口设置(若数据线接在电脑主机后面的上方则选COM1
若数据线接在电脑主机后面的下方则选COM2)PLC→传送→写出→范围设置(范围可在指令表里查)
6.PLC处于RUN状态(即拨片向上),电脑关机
7.接主电路图和PLC接线图,接完线后通电,按控制按钮
因为有些同学接错线导致跳闸,所以最好是先把程序传到PLC,再把电脑关闭,以免损坏电脑。
三、PLC梯形图
按钮顺序
正转→停止:
X2(SB2)→X5 (KS-2) →X1(SB1)→X5 (KS-2)
正转启动通停止断
反转→停止:
X3(SB3)→X4 (KS-1) →X1(SB1)→X4 (KS-1)
反转启动通停止断。
授课时间授课班级上课地点 教学单元名称三相异步电动机的反接制动 课时数 0.4 教学目标 1.三相异步电动机的反接制动几种方式。
2.培养学生分析问题、解决问题的能力。
教学重点 反接制动几种方式教学难点反接制动几种方式 目标群体 普专教学环境 实训室教学方法 项目驱动、讲练结合等时间安排 教学过程设计1. 转速反向反接制动(或称倒拉反向反接制动)图4-36电动机转速反向反接制动电路图转速反向反接制动如图4-36,异步电机转子串接较大电阻接通电源,起动转矩方向与重物G 产生的负载转矩的方向相反,而且T st <T L ,在重物G 的作用下,迫使电机反T st 的方向旋转,并在重物下放的方向加速。
其转差率s 为1)(11>--=n n n s (4-12) 随|-n|的增加,s 、I 2及T em 都增大,直到满足T=T L (图4-37B 点),电机转速为-n 2稳定运行,重物匀速下放。
图4-38中所示机械特性的第四象限(实线部分),即为异步电机转速反向反接制动的机械特性。
图4-37转速反向反接制动时的异步电机特性转速反向反接制动适用于低速匀速下放重物。
电动机工作在反接制动状态时,它由轴上输入机械功率,定子又通过气隙向转子输送电功率,这两部分功率都消耗在转子电路的总电阻上。
2. 定子两相反接的反接制动图4-38 异步电机定子两相反接的电路图与机械特性(a)电路图;(b)机械特性设异步电动机带反抗性负载原来稳定运行于电动状态如图4-38)的A 点,为了迅速停车或反转,可将定子两相反接,并同时在绕线式异步电动机转子回路中接电阻R f ,如图4-38)所示,由于定子相序的改变,使旋转磁场的方向发生改变,从而使异步电动机的工作点从原来电动机运行机械特性上的A 点,转移到新的机械特性(通过-n 1的特性)上的B 点。
此时,由于转子切割磁场的方向与电动状态时相反,则感应电动势的方向也改变。
此时的转差率为1n n n n n n s 111>+=---= (4-13)由上式可知,s>1是反接制动的特点(含转速反向和两相反接两种制动)。