2-3信号流程图
- 格式:ppt
- 大小:1.62 MB
- 文档页数:12
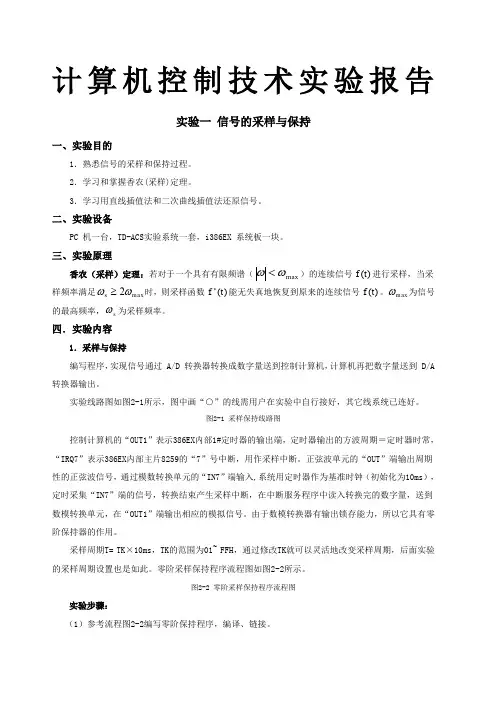
计算机控制技术实验报告实验一 信号的采样与保持一、实验目的1.熟悉信号的采样和保持过程。
2.学习和掌握香农(采样)定理。
3.学习用直线插值法和二次曲线插值法还原信号。
二、实验设备PC 机一台,TD-ACS 实验系统一套,i386EX 系统板一块。
三、实验原理香农(采样)定理:若对于一个具有有限频谱(max ωω<)的连续信号)(t f 进行采样,当采样频率满足max 2ωω≥s 时,则采样函数)(t f *能无失真地恢复到原来的连续信号)(t f 。
m ax ω为信号的最高频率,s ω为采样频率。
四.实验内容1.采样与保持编写程序,实现信号通过 A/D 转换器转换成数字量送到控制计算机,计算机再把数字量送到 D/A 转换器输出。
实验线路图如图2-1所示,图中画“○”的线需用户在实验中自行接好,其它线系统已连好。
图2-1 采样保持线路图控制计算机的“OUT1”表示386EX 内部1#定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX 内部主片8259的“7”号中断,用作采样中断。
正弦波单元的“OUT ”端输出周期性的正弦波信号,通过模数转换单元的“IN7”端输入,系统用定时器作为基准时钟(初始化为10ms ),定时采集“IN7”端的信号,转换结束产生采样中断,在中断服务程序中读入转换完的数字量,送到数模转换单元,在“OUT1”端输出相应的模拟信号。
由于数模转换器有输出锁存能力,所以它具有零阶保持器的作用。
采样周期T= TK×10ms,TK 的范围为01~ FFH ,通过修改TK 就可以灵活地改变采样周期,后面实验的采样周期设置也是如此。
零阶采样保持程序流程图如图2-2所示。
图2-2 零阶采样保持程序流程图实验步骤:(1)参考流程图2-2编写零阶保持程序,编译、链接。
(2)按照实验线路图2-1接线,检查无误后开启设备电源。
(3)用示波器的表笔测量正弦波单元的“OUT ”端,调节正弦波单元的调幅、调频电位器及拨动开关,使得“OUT ”端输出幅值为3V ,周期1S 的正弦波。
目录1.引言 (1)1.1设计目的 (1)1.2设计内容 (1)1.2.1系统功能概述 (1)1.2.2设计实现目标 (1)2.系统总体方案设计 (2)2.1硬件配置及组成原理 (2)2.1.1所用硬件 (2)2.1.2系统组成原理图 (2)2.2系统变量定义及分配表 (2)2.3系统接线图设计 (3)2.4系统可靠性设计 (3)3.控制系统设计 (4)3.1控制程序流程图设计 (4)3.2控制程序时序图设计 (4)3.3控制程序设计思路 (5)3.4创新设计内容 (5)4.系统调试及结果分析 (5)4.1系统调试及解决的问题 (5)4.1.1程序梯形图 (5)4.2结果分析 (7)结束语 (8)参考文献 (8)1.引言1.1设计目的综合运用本课程及前期课程的相关知识和技能,相对独立地设计和调试一个小型PLC应用系统,使学生获得控制技术工程的基本训练,提高工程意识和实践技能。
同时提高学生对文献资料的检索和信息处理的能力,以及编写和整理设计文档的能力。
1.2设计内容1.2.1系统功能概述工业控制的发展一直都是向着自动化,智能化,无人值守,自动监测的方向发展,其中对于系统故障的监测便是系统自动化设计当中的一个重要环节。
对于快速检测、判断、分析,故障类型及位置和排除故障具有重要作用。
自动故障报警电路就是这样一个模块,这里我们设计的是三种故障报警电路。
1.2.2设计实现目标三种故障标准报警电路控制:标准的报警功能应该是声光报警。
当故障发生时,报警指示灯闪烁,报警电铃或蜂鸣器响。
操作人员知道故障发生后,按消铃按钮,把电铃关掉,报警指示灯从闪烁变为常亮。
故障消失后,报警灯熄灭。
另外还应设置试灯、试铃按钮,用于平时检测报警指示灯和电铃的好坏。
在实际的应用系统中可能出现的故障一般有多种。
对报警指示灯来说,一种故障对应于一个指示灯,但一个系统只能有一个电铃。
设计一个三种故障标准报警电路,报警具有优先级。
2.系统总体方案设计2.1硬件配置及组成原理2.1.1所用硬件1、PLC,选择FX2N-32MT型PLC(如图2.1.1所示)选择该型号PLC,主要考虑I/O点数满足要求,PLC价格便宜。

《自动控制理论》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCsRCs s U s U 112+= (b)()()141112+⋅-=Cs RR R s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K(2) 0,,==∞=a v p K K K K (3) 10,,KK K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 32220220222001200=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s= ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=-3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
R多媒体产品维修手册LED43K5500U主板方案:Hi3751-V600电源方案:HLL-4855WK多媒体研发中心2015.04目录LED43K5500U (3)一、产品介绍 (3)(一)、产品外观介绍 (3)外观图: (3)端子图: (4)(二)、产品功能规格、特点介绍 (5)技术参数: (5)视频支持格式: (6)HDMI、分量输入端口支持的信号格式: (6)(三)、产品差异介绍 (6)主板差异: (6)电源板差异: (7)二、产品方案概述 (7)整机内部图 (7)整机信号流程图 (8)电源分配图 (9)三、主板原理说明 (10)主板实物图 (10)主板电路原理图 (12)四、电源板原理说明 (36)A、产品介绍: (36)B、方案概述 (37)C、分部原理说明 (37)D、常见故障分析 (42)E、单板检修流程 (42)五、产品爆炸图及明细 (44)六、软件升级方法 (45)A、海思系列机型信息汇总: (45)B、海思系列方案使用的调试工具以及相关软件工具介绍 (46)C、如何使用U盘升级: (47)D、升级完成之后的维护工作。
(47)E、如何获取有效的Log信息? (48)F、故障板的常规判断方法: (49)液晶电视服务手册LED43K5500U一、产品介绍(一)、产品外观介绍外观图:(因拍摄技术有限,图片仅供参考)端子图:(二)、产品功能规格、特点介绍技术参数:视频支持格式:HDMI、分量输入端口支持的信号格式:(三)、产品差异介绍179330液晶屏\HE426HU-B51\S1182650主板组件\RSAG2.908.6299-01\ROH174429电源板组件\RSAG2.908.5687-25\ROH主板差异:本机型采用主板组件暂无通用。
电源板差异:RSAG2.908.5687-25可与RSAG2.908.5687-02、03、04、05、26、47等通用。
二、产品方案概述整机内部图整机信号流程图电源分配图三、主板原理说明主板实物图主板电路原理图- 15 –- 16 –- 17 –- 18 –- 19 –- 20 –四、电源板原理说明本机型采用电源板组件电源板组件RSAG2.908.5687-25。
目录第一章课程设计目的和要求 01.1 课程设计目的 01.2 课程设计要求 (1)第二章课程设计任务内容 02.1课程设计任务 02.2 课程设计原理 02.3 课程设计内容 (4)第三章详细设计说明 (5)3.1 模块描述 (5)3.2 性能描述 (5)3.3 输入项 (6)3.4 输出项 (6)3.5 数据结构 (7)3.6 算法介绍 (7)3.7 流程图 (8)3.7.1 主程序流程图 (8)3.7.2 算法流程图 (9)3.8 接口描述 (11)3.9 限制条件 (13)第四章件使用说明 (13)4.1 系统开发与运行环境 (13)4.2系统的运行说明 (13)4.3 运行结果 (13)第五章课程设计心得体会 (19)附录1:参考文献 (20)附录2:程序清单 (21)交通信号灯模拟第一章课程设计目的和要求1.1 课程设计目的根据学院课程安排,在大三的第一个学期我们开设了操作系统这门课程,操作系统可以说是是计算机系统的核心和灵魂,是计算机系统必不可少的组成部分。
通过学习,对于操作系统的运行方式以及设计理念有了较清楚的认识。
要想真正学好并理解操作系统这门课程,不但需要理解操作系统的概念和原理,还需要加强操作系统实验,上机进行编程实践,现在一学期的课程已经结束,本次课程设计在同学们掌握理解该课程的基础上,对操作系统内部的一些具体项目的实现方法进行实战演练,通过实践将知识彻底掌握。
操作系统课程设计是该课程重要的实践教学环节。
通过这次课程设计,一方面可以使学生更透彻地理解操作系统的基本概念和原理,摆脱抽象的理解,从实践中将理论具体化;另一方面,通过课程设计还可以加强学生的实践能力,培养学生独立分析问题、解决问题、应用知识的能力和创新精神。
本次课程设计的题目为交通信号灯模拟,在熟练掌握课本所讲解的计算机的P 操作和V操作的原理的基础上,利用C++程序设计语言在windows操作系统下模拟实现交通信号灯的模拟,一方面加深对原理的理解,另一方面提高根据已有原理通过编程解决实际问题的能力,为进行系统软件开发和针对实际问题提出高效的软件解决方案打下基础。

气体探测仪说明书一、系统上电1.1、智能控制单元上电过程如下:1.1-1合闸断路器(位于司钻房电控柜,QF5)等待1.1-2显示启动状态代码“SU”“F4”是故障代码的一种(故障代码表,见“故障跟踪”一章)等待1.1-3显示当前气体浓度,”准备/READY”灯常绿亮(注:当前气体浓度为零)显示“F4”,代表故障(由于该说明书,基于模拟实验,该实验只连接了上图红框处的两张报警卡)1.2、硫化氢和可燃性气体探测器上电如下。
注意:探测器首次上电时间不得少于15分钟,后才能正常使用。
等待1.2-1首次上电将测试LED指示灯,若正常则显示“88.8”等待1.2-2完成指示灯测试后,进入等待1.2-3显示当前气体浓度(当前气体浓度为0)启动状态,显示“SU”代码二、系统复位/测试当报警发生2-1按“应答”键释放应答继电器状态(A2点亮,代表当前为报警状态)2-2按“复位”键清除报警记忆,上图A2熄灭2-3持续按住“复位”键,测试信号卡面板上的信号灯(正常为全部灯点亮,如红框所示)三、系统设置3.1、设置气体报警控制单元(两种控制卡设置相同,以可燃性气体控制卡设置为例)A、浏览设置连续按住暗藏方式选择键Mode/Select(简称M/S键)10秒钟后,状态指示灯SETUP开始闪亮后释放M/S键,显示屏将按下图所示的流程图自动显示仪表已设定好的各个状态参数。
核对程序流程图流程图片如下:,后移走螺丝刀等待EN/dE,A2闪亮,“设置/SETUP”闪亮等待注:EN为报警激励状态;dE为报警非激励状态,A2闪亮,“设置/SETUP”闪亮等待注:LA为报警锁定状态;nL为报警非锁定状态“设置/SETUP”闪亮等待注:60为设定的报警阀值EN/dE,A1闪亮,“设置/SETUP”闪亮等待注:EN为报警激励状态;dE为报警非激励状态“设置/SETUP”闪亮等待注:LA为报警锁定状态;nL为报警非锁定状态“设置/SETUP”闪亮等待注:30为设定的预报警阀值“设置/SETUP”闪亮等待注:AC为故障激励状态;nA为故障非激励状态“设置/SETUP”闪亮等待注:ct为卡测试状态参数模式10显示3,“设置/SETUP”闪亮等待注:“3”为卡测试时间,单位:秒“设置/SETUP”闪亮等待注:该模式为卡测试时报警输出触发“AC”,非触发“nA”、2显示PE/Pd,“设置/SETUP”闪亮等待注:“PE”为设置口令有效,“Pd”为口令设置无效3返回到运行状态B、参数更改设置连续按住M/S键25秒,当状态灯SETUP由闪亮变常亮时释放M/S键,仪表进入设定程序。
2010/2011学年第 2 学期学院:信息与通信工程学院专业:电子信息科学与技术学生姓名:学号:课程设计题目:低通滤波器设计起迄日期: 6 月 13 日~6月 24日课程设计地点:指导教师:系主任:下达任务书日期: 2011 年 6 月12 日课程设计任务书课程设计任务书目录1 设计目的及要 (5)1.1设计目的 (5)1.2设计内容和要求 (5)2设计原理 (5)2.1 FIR滤波器 (5)2.2窗函数 (6)2.3矩形窗 (7)3设计过程 (8)3.1设计流程图 (8)3.2 产生原始信号并分析频谱 (8)3.3 使用矩形窗设计不同特性的数字滤波器 (10)3.4 信号滤波处理 (11)4 实验结果及分析 (12)5 课程设计心得体会 (12)6 参考文献 (13)附录: (14)低通滤波器的设计1 设计目的及要求1.1设计目的设计一种低通滤波器并对信号进行滤波。
低通滤波器的作用是滤去信号中的中频和高频成分,增强低频成分。
要求做到:1.了解MATLAB的信号处理技术;2.使用MATLAB设计低通滤波器,掌握其滤波处理技术;3.对滤波前和滤波后的波形进行时域和频域比较。
1.2设计内容和要求1.熟悉有关采样,频谱分析的理论知识,对信号作频谱分析;2.熟悉有关滤波器设计理论知识,选择合适的滤波器技术指标,设计低通滤波器对信号进行滤波,对比分析滤波前后信号的频谱;3.实现信号频谱分析和滤波等有关MATLAB函数;2设计原理本次课程设计,我们主要是基于矩形窗的FIR滤波器来设计一个低通滤波器。
2.1 FIR滤波器FIR滤波器即有限抽样响应因果系统,其单位抽样响应h<n>是有限长的;极点皆位于z=0处;结构上不存在输出到输入的反馈,是非递归型的。
其系统函数表示为:普通的FIR滤波器系统的差分方程为:式中:N为FIR滤波器的抽头数;x<n>为第n时刻的输入样本;h<i>为FIR滤波器第i级抽头系数。
R多媒体产品维修手册LED55K300UD主板方案:Hi3751-V600电源方案:HLL-5060WO多媒体研发中心2015.08目录LED55K300UD (3)一、产品介绍 (3)(一)、产品外观介绍 (3)外观图: (3)端子图: (4)(二)、产品功能规格、特点介绍 (5)技术参数: (5)视频支持格式: (5)HDMI、分量输入端口支持的信号格式: (6)(三)、产品差异介绍 (6)主板差异: (6)电源板差异: (6)二、产品方案概述 (6)整机内部图 (6)整机信号流程图 (7)电源分配图 (8)三、主板原理说明 (9)主板实物图 (9)主板电路原理图 (10)四、电源板原理说明 (35)A、产品介绍: (35)B、方案概述 (35)C、分部原理说明 (36)D、常见故障分析 (40)E、单板检修流程 (40)五、产品爆炸图及明细 (41)六、软件升级方法 (42)A、海思系列机型信息汇总: (42)B、海思系列方案使用的调试工具以及相关软件工具介绍 (42)C、如何使用U盘升级: (43)D、升级完成之后的维护工作。
(44)E、如何获取有效的Log信息? (44)F、故障板的常规判断方法: (46)液晶电视服务手册LED55K300UD一、产品介绍(一)、产品外观介绍外观图:(因拍摄技术有限,图片仅供参考)端子图:(二)、产品功能规格、特点介绍技术参数:视频支持格式:HDMI、分量输入端口支持的信号格式:(三)、产品差异介绍188744液晶屏\HD550DU-B81\S0188776主板组件\RSAG2.908.6299-18\ROH187901电源板组件\RSAG2.908.6396-05\ROH主板差异:主板组件RSAG2.908.6299-18与主板组件RSAG2.908.6299-03可通用。
电源板差异:电源板组件RSAG2.908.6396-05与电源板组件RSAG2.908.6396-02可以通用。
煤矿各工种操作流程图各工种操作流程手册目录前言第一部分公共部分工种操作流程1、煤溜工操作流程2、皮带工操作流程3、井下电钳工操作流程4、小绞车司机操作流程5、小绞车司机挂钩工操作流程第二部分采煤专业工种操作流程1、采煤机司机操作流程2、端头维护工操作流程3、支架工操作流程4、乳化液泵工操作流程5、放煤工操作工序流程6、清煤工操作流程第三部分掘进专业分工种操作工序流程1、锚杆锚索工操作流程2、掘进机司机操作流程3、侧装机司机第四部分开拓专业分工种操作流程1、耙岩机司机操作流程2、打眼工操作流程3、推车工操作流程4、喷浆工操作流程5、支棚工操作流程6、机电安装工操作流程7、排水泵工操作流程第五部分运输专业各工种工作流程1、蓄电机车司机操作流程:2、机车信号工操作流程:3、信号站信号工操作流程:4、充电工操作流程:5、电机车维护工操作流程:6、起吊换瓶工操作流程:7、立井信号工操作流程:8、立井把罐工操作流程:9、天车工操作流程:10、矿车修理工操作流程:11、无极绳挂钩工操作流程:12、装、卸料工操作流程:13、大巷钉道操作流程:14、小巷钉道操作流程:15、电氧焊工操作流程:第六部分拆安设备工种操作流程1、拆安工程回柱机司机操作流程2、导链操作工操作流程3、综采设备安装工操作流程4、综采设备拆除工操作流程5、拆除设备操作流程:第七部分通风专业各工种操作流程1、瓦斯检查工操作流程2、放炮工操作流程3、测风工操作流程4、密闭工操作流程图5、修护工操作流程6、火区观测工操作流程7、库管员操作流程8、观测工流程图9、接管工操作流程10、防尘工操作流程11、测尘工操作流程12、钻机工操作流程13、监测工操作流程14、监测中心站值班人员工艺流程15、仪器房仪器收发工操作流程16、泵站观测工流程图第八部分洗煤厂各车间工种作业流程1、胶带输送机工操作流程2、刮板输送机工操作流程3、给煤机工操作流程4、浅槽分选机工种操作流程5、介质制备工操作流程6、破碎机工操作流程7、原煤分级筛工操作流程8、比控工操作流程9、旋流器工操作流程10、脱介筛工操作流程11、磁选机工操作流程12、离心机工操作流程13、压滤机工操作流程14、泵工种操作流程15、浓缩机工操作流程16、检装工工操作流程17、推土机工操作流程18、装车工操作流程19、采样工操作流程20、制样工操作流程21、化验工操作流程22、浮沉工操作流程23、检修工种作业流程24、电工操作流程25、配电工操作流程第九部分机运部岗位操作流程1、空气压缩机司机操作流程2、副立井提升机司机操作流程3、排矸井提升机司机操作流程4、芦南主扇司机操作流程5、芦北主扇司机操作流程6、家岩主扇司机操作流程7、神堂嘴瓦斯机司机操作流程8、神堂嘴污水处理工操作流程9、乳化液配液工操作流程10、降配电工操作流程11、电气试验工操作流程12、外线电工操作流程13、维修工操作流程14、机电检修工操作流程15、司炉工操作流程16、水泵工操作流程17、头灯工操作流程18、佛洼主扇司机操作流程19、降配电工操作流程新景矿各专业工种操作流程为了进一步把集团公司“一举一动,规章至尊”这条理念更好的贯彻落实到每个职工的心里,规每个职工的现场操作行为,把我矿的安全生产搞得更好,由矿安全监察部组织各部门对各专业工种操作工艺编写成操作流程,望广大员工认真学习,熟练掌握,遵章作业。
2/3/4/5/6/7/8/9/10节锂电12/18/24V铅酸充电管理芯片HB6296功能特性简述●适用于2-3-4节,5-7-9或6-8-10节锂离子/锂聚合物高效率同步Buck充电器●8V-60V宽输入电压范围●20mΩ充电电流检测电阻●充电电流高达10A,●0.5%的充电电压控制精度●可选择电池节数:HB6296A-2,3或者4节HB6296B-5,7或者9节HB6296C-6,8或者10节HB6296D- 12V,18V,24V铅酸●4%的可编程充电电流控制精度●恒压充电电压值可通过外接电阻微调●智能电池检测●支持充电器输出与电池间的电阻补偿●内置软启动●开关频率400/300KHz●LED 充电状态指示●电池短路检测,保护●内置过温关断●输出充电电流信息●电池充电过压保护●Cycle-by-cycle限流●外置电池温度检测●外置ISET脚充电使能●睡眠模式电池功耗小于15uA●外置充电时间限制●工作环境温度范围:-20℃~85℃●TSSOP-20或QFN-20封装应用●手持设备●PDVD,PDA和智能手机●笔记本电脑●自充电电池组●独立充电器概述HB6296 为同步开关型高效锂离子/锂聚合物电池充电管理芯片,非常适合于便携式设备的充电管理应用。
HB6296 集高精度电压和输入电流及充电电流调节器、预充、充电状态指示和充电截止等功能于一体,采用TSSOP-20或者QFN-20封装。
HB6296 对电池充电分为三个阶段:预充(Pre-charge )、恒流(CC/Constant Current)、恒压(CV/Constant V oltage)过程,恒流充电电流通过外部分压电阻决定,恒压充电电压可通过外部电阻微调。
HB6296 集成电池温度检测,过压及短路保护,确保充电芯片安全工作。
HB6296 集成智能电池检测功能及超时错误恢复功能,方便用户使用。
管脚定义HB6296TTC 4ISET 6COMP 7VCC 2STAT220STAT119LX 18HDR 17BOOT16REGN 15LDR 14GND 13SRP10SRN 9DISG 12ISET23CELL 5SLEEP 1THM11VTRIM 8深圳市华太电子有限公司HB6296 典型应用电路CONFIDENTIAL HB6296-DS-v0.9 Page 4模块功能框图THMAGNDSLEEPSTAT2STAT1PGNDLDR LXHDR BSTISETSRPSRNVTRIMCELLVCC REGNTTCDISG最大工作范围电气参数工作流程图功能描述充电流程电池电压检测SRN和GND脚之间的压差。
各工种操作流程手册前言第一部分公共部分工种操作流程1、煤溜工操作流程2、皮带工操作流程3、井下电钳工操作流程4、小绞车司机操作流程5、小绞车司机挂钩工操作流程第二部分采煤专业工种操作流程1、采煤机司机操作流程2、端头维护工操作流程3、支架工操作流程4、乳化液泵工操作流程5、放煤工操作工序流程6、清煤工操作流程第三部分掘进专业分工种操作工序流程1、锚杆锚索工操作流程2、掘进机司机操作流程3、侧装机司机第四部分开拓专业分工种操作流程1、耙岩机司机操作流程2、打眼工操作流程3、推车工操作流程4、喷浆工操作流程5、支棚工操作流程6、机电安装工操作流程7、排水泵工操作流程第五部分运输专业各工种工作流程1、蓄电机车司机操作流程:2、机车信号工操作流程:3、信号站信号工操作流程:4、充电工操作流程:5、电机车维护工操作流程:6、起吊换瓶工操作流程:7、立井信号工操作流程:8、立井把罐工操作流程:9、天车工操作流程:10、矿车修理工操作流程:11、无极绳挂钩工操作流程:12、装、卸料工操作流程:13、大巷钉道操作流程:14、小巷钉道操作流程:15、电氧焊工操作流程:第六部分拆安设备工种操作流程1、拆安工程回柱机司机操作流程2、导链操作工操作流程3、综采设备安装工操作流程4、综采设备拆除工操作流程5、拆除设备操作流程:第七部分通风专业各工种操作流程1、瓦斯检查工操作流程2、放炮工操作流程3、测风工操作流程4、密闭工操作流程图5、修护工操作流程6、火区观测工操作流程7、库管员操作流程8、观测工流程图9、接管工操作流程10、防尘工操作流程11、测尘工操作流程12、钻机工操作流程13、监测工操作流程14、监测中心站值班人员工艺流程15、仪器房仪器收发工操作流程16、泵站观测工流程图第八部分洗煤厂各车间工种作业流程1、胶带输送机工操作流程2、刮板输送机工操作流程3、给煤机工操作流程4、浅槽分选机工种操作流程5、介质制备工操作流程6、破碎机工操作流程7、原煤分级筛工操作流程8、比控工操作流程9、旋流器工操作流程10、脱介筛工操作流程11、磁选机工操作流程12、离心机工操作流程13、压滤机工操作流程14 、泵工种操作流程15、浓缩机工操作流程16、检装工工操作流程17、推土机工操作流程18、装车工操作流程19、采样工操作流程20、制样工操作流程21、化验工操作流程22、浮沉工操作流程23、检修工种作业流程24、电工操作流程25、配电工操作流程第九部分机运部岗位操作流程1、空气压缩机司机操作流程2、副立井提升机司机操作流程3、排矸井提升机司机操作流程4、芦南主扇司机操作流程5、芦北主扇司机操作流程6、家岩主扇司机操作流程7、神堂嘴瓦斯机司机操作流程8、神堂嘴污水处理工操作流程9、乳化液配液工操作流程10、降配电工操作流程11、电气试验工操作流程12、外线电工操作流程13、维修工操作流程14、机电检修工操作流程15、司炉工操作流程16、水泵工操作流程17、头灯工操作流程18、佛洼主扇司机操作流程19、降配电工操作流程新景矿各专业工种操作流程为了进一步把集团公司“一举一动,规章至尊”这条理念更好的贯彻落实到每个职工的心里,规每个职工的现场操作行为, 把我矿的安全生产搞得更好,由矿安全监察部组织各部门对各专业工种操作工艺编写成操作流程,望广大员工认真学习,熟练掌握, 遵章作业。