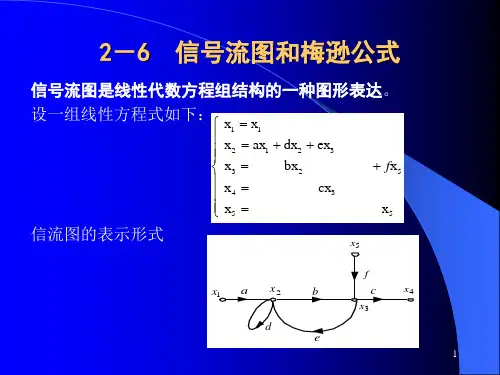
2-6 信号流程图
- 格式:ppt
- 大小:965.00 KB
- 文档页数:6

《自动控制理论》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCsRCs s U s U 112+= (b)()()141112+⋅-=Cs RR R s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K(2) 0,,==∞=a v p K K K K (3) 10,,KK K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 32220220222001200=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s= ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=-3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
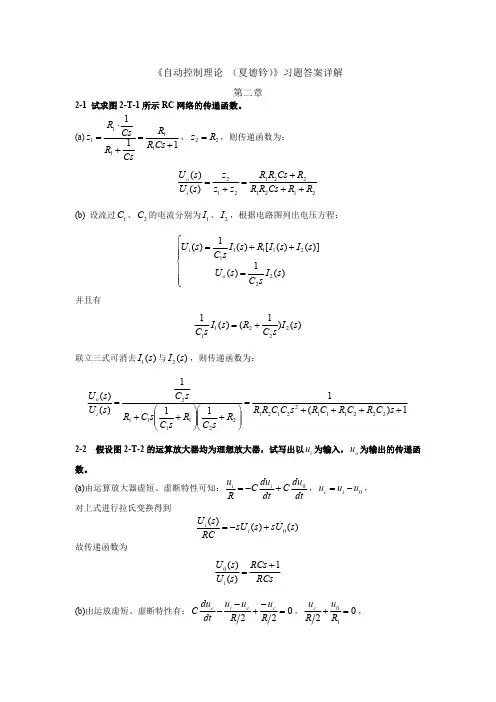
《自动控制理论 (夏德钤)》习题答案详解第二章2-1 试求图2-T-1所示RC 网络的传递函数。
(a),,则传递函数为:11111111+=+⋅=Cs R R CsR Cs R z 22R z =2121221212)()(R R Cs R R R Cs R R z z z s U s U i o +++=+=(b) 设流过、的电流分别为、,根据电路图列出电压方程:1C 2C 1I 2I ⎪⎪⎩⎪⎪⎨⎧=++=)(1)()]()([)(1)(2221111s I s C s U s I s I R s I s C s U o i 并且有)()1()(122211s I sC R s I s C +=联立三式可消去与,则传递函数为:)(1s I )(2s I 1)(1111)()(222111221212211112++++=⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛++=s C R C R C R s C C R R R s C R s C s C R sC s U s U i o 2-2 假设图2-T-2的运算放大器均为理想放大器,试写出以为输入,为输出的传递函i u o u 数。
(a)由运算放大器虚短、虚断特性可知:,,dtduC dt du C R u i i 0+-=0u u u i c -=对上式进行拉氏变换得到)()()(0s sU s sU RCs U i i +-=故传递函数为RCsRCs s U s U i 1)()(0+=(b)由运放虚短、虚断特性有:,,022=-+--R u R u u dt du Cc c i c 0210=+R u R u c联立两式消去得到c u 02220101=++⋅u R u R dt du R CR i 对该式进行拉氏变换得0)(2)(2)(20101=++s U R s U R s sU R CR i 故此传递函数为)4(4)()(10+-=RCs R R s U s U i (c),且,联立两式可消去得到02/2/110=+-+R uR u u dt du Cc c c 21R u R u c i -=c u 0222101=++⋅Ru R u dt du R CR i i 对该式进行拉氏变换得到0)(2)(2)(2011=++⋅s U Rs U R s sU R CR i i 故此传递函数为RCs R R s U s U i 4)4()()(110+-=2-3 试求图2-T-3中以电枢电压为输入量,以电动机的转角为输出量的微分方程式和a u θ传递函数。
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
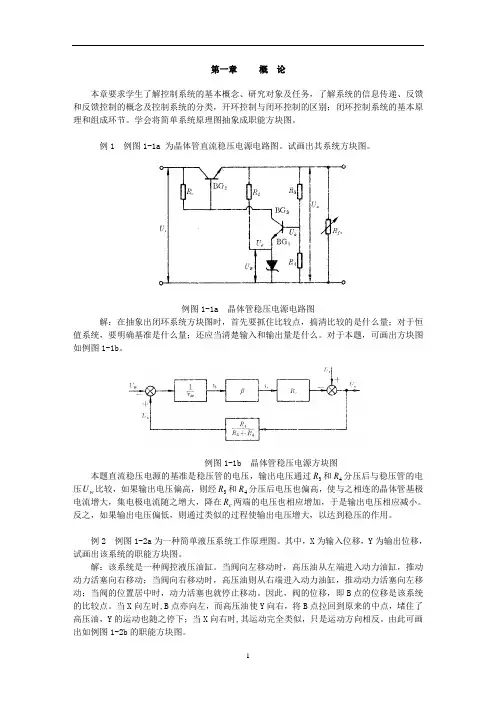
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
第四章基本信号显示的图解与说明一、进站色灯信号机进站信号机(含接车进路信号机和接发车进路信号机)显示下列信号:(一)进站信号机(四显示自动闭塞区段除外)以下解释适用于半自动闭塞、自动站间闭塞和三显示自动闭塞。
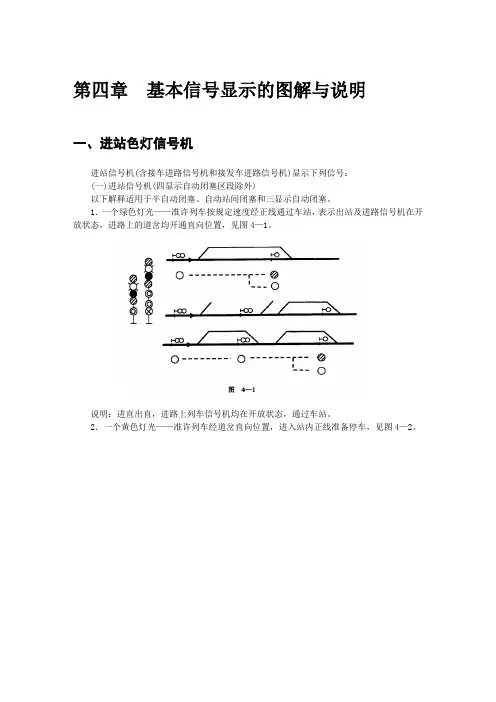
1.一个绿色灯光——准许列车按规定速度经正线通过车站,表示出站及进路信号机在开放状态,进路上的道岔均开通直向位置,见图4—1。
说明:进直出直,进路上列车信号机均在开放状态,通过车站。
2.一个黄色灯光——准许列车经道岔直向位置,进入站内正线准备停车,见图4—2。
说明:进直出弯。
只要发车进路经过道岔侧向,不论道岔号(辙叉号)是多大,进站信号机均显示黄灯。
3.两个黄色灯光——准许列车经道岔侧向位置,进入站内准备停车,见图4—3。
说明:经辙叉号18号以下道岔的侧向接车,不论次一架信号机开放与否,进站信号机均显示两个黄灯。
4.一个黄色闪光和一个黄色灯光一一准许列车经过18号及其以上道岔侧向位置,进入站内越过下一架已经开放的信号机,且该信号机的进路经道岔的直向或18号及其以上道岔的侧向位置,见图4——4(a)。
说明:图中带圈道岔是指18号及其以上道岔,显示黄闪、黄时,必须同时满足如下条件:——接车进路开通侧向位置的道岔必须是18号及其以上道岔;——发车信号机在开放状态;——发车进路上道岔均开通直向位置,或开通侧向位置的道岔必须是18号及其以上道岔。
图4—4(b)是作对照用的,说明虽经18号及其以上道岔侧向位置,但后一架信号机关闭或经小于18号道岔侧向位置开通进路时,仍应显示两个黄灯。
5.一个红色灯光——不准列车越过该信号机,见图4—5。
6.一个绿色灯光和一个黄色灯光——准许列车经道岔直向位置,进入站内越过下一架已经开放的接车进路信号机准备停车,见图4—6。
说明:下一架接车进路信号机(或接发车进路信号机)显示一个黄灯,注意下一架正线上的进路信号机应设成接车性质的信号机,如图4—6最下面站场的正线上的进路信号机,尽管无两个黄灯的显示,也要设成接发车进路信号机,因为接发车信号机能区分进路的弯与直。

多声道数字卡拉OK系统dB-MARK 卡拉OK处理器KP25+具备全数字处理、自动、智能、全功能等特点,是专为VIP豪华卡拉OK包房工程、量贩式卡拉OK工程、永久安装工程和其它高级娱乐场所音响增强设备而设计。
A.功能特点◆96KHz采样频率,32-bit DSP处理器,24-bit A/D及D/A转换◆3路可选/自动音视频信号输入(AUX、VOD、BGM),提供3组5个话筒输入,标准的3.1或5.1声道输出◆提供USB接口可连接电脑,提供远程控制和红外线控制◆直接用面板的功能键和拔轮进行功能设置或是连接电脑通过PC控制软件来控制,均十分方便、直观和简洁◆单机提供20组设备数据存储,提供10组效果数据存储,通过PC软件可进行设备之间的复制◆可通过面板的“系统”键来设定密码锁定面板操作的部分或全部功能,以防止闲杂人员的操作破坏机器的工作状态◆每个输出通道均有7段独立的均衡(可选参量、高调、低调),1个高通滤波器,1个低通滤波器,调节增益范围-30dB至+15dB,高通滤波器和低通滤波器均可选7种不同斜率和3种不同模式◆采用汉字液晶屏和6段LED显示输入/输出的精确数字电平表、哑音及编辑状态◆每个输入和输出均有延时和相位控制及哑音设置,输入延时最长可达30ms,输出延时最长可达60ms◆输出通道还可控制该通道的效果比例、话筒音量、音乐音量和效果音量◆话筒带4种级别的防啸叫功能,话筒和音乐信号均带有噪声门(-120dB至-60dB)◆效果带三段参量均衡和一对高低通滤波器,回声和效果的具体参数均可调◆可以通过S端子连接中控来控制通道的主要参数B.技术参数输入阻抗:非平衡20KΩ输出阻抗:非平衡100Ω共模抑制比:70dB(1KHz)输入范围:≤+25dBu频率响应:20Hz-20KHz(-0.5dB音乐)采样频率:96KHz量化比特数:24位信噪比:>90dB失真度:<0.01% OUTPUT=0dB/1KHz功耗:≤25WC.信号流程和内部结构信号流程图如下:左右混响话筒直达声右混响左混响左右回声右回声左回声左右音乐右音乐左音乐压限压限压限压限压限哑音哑音哑音哑音哑音七段均衡七段均衡七段均衡七段均衡七段均衡七段均衡延时延时延时延时延时延时相位相位相位相位相位相位分频分频分频分频分频分频总音量联调超低音乐话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒音量效果比例音乐音量效果音量音乐相位效果相位话筒相位话筒混合话筒直达声延时相位高低切音量压限哑音噪声门防啸叫均衡九段右音乐左音乐左音乐左+右 音乐右音乐混响左回声左混响左回声右混响左+右 混响左+右 回声右回声混响时间混响电平混响湿度混响相位混响预延左回声湿度左回声相位左回声次数左回声预延时高低切哑音左回声延时右湿度回声右相位回声右回声次数右回声预延时右回声延时右回声均衡三段噪声门延时相位高低切音量压限哑音均衡九段压限哑音超低音乐(左+右)图 X-X 信号处理方框图图 X-X 功能结构图D.面板面板上,装有中文液晶屏,实时显示操作界面和菜单信息,各路输出均有电平监视,四种防啸叫级别。
第四章基本信号显示的图解与说明一、进站色灯信号机进站信号机(含接车进路信号机和接发车进路信号机)显示下列信号:(一)进站信号机(四显示自动闭塞区段除外)以下解释适用于半自动闭塞、自动站间闭塞和三显示自动闭塞。
1.一个绿色灯光——准许列车按规定速度经正线通过车站,表示出站及进路信号机在开放状态,进路上的道岔均开通直向位置,见图4—1。
说明:进直出直,进路上列车信号机均在开放状态,通过车站。
2.一个黄色灯光——准许列车经道岔直向位置,进入站内正线准备停车,见图4—2。
说明:进直出弯。
只要发车进路经过道岔侧向,不论道岔号(辙叉号)是多大,进站信号机均显示黄灯。
3.两个黄色灯光——准许列车经道岔侧向位置,进入站内准 备停车,见图4—3。
说明:经辙叉号18号以下道岔的侧向接车,不论次一架信号机开放与否,进站信号机均显示两个黄灯。
4.一个黄色闪光和一个黄色灯光一一准许列车经过18号及其以上道岔侧向位置,进入站内越过下一架已经开放的信号机,且该信号机的进路经道岔的直向或18号及其以上道岔的侧向位置,见图4——4(a)。
说明:图中带圈道岔是指18号及其以上道岔,显示黄闪、黄时,必须同时满足如下条件:——接车进路开通侧向位置的道岔必须是18号及其以上道岔;——发车信号机在开放状态;——发车进路上道岔均开通直向位置,或开通侧向位置的道岔必须是18号及其以上道岔。
图4—4(b)是作对照用的,说明虽经18号及其以上道岔侧向位置,但后一架信号机关闭或经小于18号道岔侧向位置开通进路时,仍应显示两个黄灯。
5.一个红色灯光——不准列车越过该信号机,见图4—5。
6.一个绿色灯光和一个黄色灯光——准许列车经道岔直向位置,进入站内越过下一架已经开放的接车进路信号机准备停车,见图4—6。
说明:下一架接车进路信号机(或接发车进路信号机)显示一个黄灯,注意下一架正线上的进路信号机应设成接车性质的信号机,如图4—6最下面站场的正线上的进路信号机,尽管无两个黄灯的显示,也要设成接发车进路信号机,因为接发车信号机能区分进路的弯与直。
33962010,31(15)计算机工程与设计Computer Engineering and Design0引言在嵌入式领域中,Linux2.6内核除了提高其实时性能,系统地移植更加方便,同时添加了新的体系结构和处理类型,可以支持大容量内存模型、微控制器,同时,还自带了很多总线驱动程序,虽然Linux 并非一个真正的实时操作系统,但2.6内核的改进能够满足大部分的应用需求,所以Linux2.6内核将会在嵌入式系统领域中大展身手[1]。
CAN (controller area network )是一种有效支持分布式控制或实时控制的串行通信网络,CAN 协议的最大特点是数据块的标识码可由11位或29位二进制数组成,可定义211或219个不同的数据块,使得CAN 总线构成的网络节点的数据通信实时性更强,提高了系统的可靠性和灵活性[2]。
传统的嵌入式系统CAN 总线驱动设计是基于嵌入式Linux2.4内核,本文着重研究和实现了在嵌入式Linux2.6内核的S3C2410开发板上使用Linux2.6自带的SPI 驱动实现CAN 总线的开发,并详细分析了在嵌入式Linux2.6.24内核下加载和声明SPI 总线的具体步骤,CAN 总线驱动初始化和中断控制的设计方法,以及CAN 驱动加载步骤。
1系统硬件设计系统硬件设计主要由微处理器S3C2410、带SPI 接口的独立CAN 控制器MCP2510与高速CAN 收发器TJA1050等器件组成[3]。
1.1芯片介绍(1)S3C2410:S3C2410是一款为手持设备和一般类型应用提供的一款高性能、低功耗、低价格微处理器。
内部采用高级微控制总线(AMBA )体系结构,主频高达203MHz ,集成3通道UART ,4通道DMA ,2通道的SPI [4]。
(2)MCP2510:MCP2510完全支持CAN 总线V2.0A/B 技术规范,能够发送和接收标准和扩展报文,同时具备验收过滤以及报文管理功能。