MC33991型二相步进电机驱动器
- 格式:doc
- 大小:228.00 KB
- 文档页数:7

L297 L298步进电机驱动控制板说明书一、板子跳线器说明:1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。
2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。
3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。
二、按键说明:板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能CW - 反向旋转HF - 半速旋转通过按键就可以直接控制电机的正反转、全速/半速和使能。
三、基本功能描述:通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。
板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。
模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。
电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。
控制输入接口包括: GND CLK EN CW HF。
需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。
四、接口说明:1、板子左上方小二接口(JT1) VCC接+5V、GND接电源地,次处为芯片L297和555芯片的工作电压;2、板子左中方小八接口(MCU-IN)为光藕隔离的信号分别为:EN(使能)、RET(复位)、C/CW(正反控制)、H/FU(全速/半速)、CLK(时钟信号) +5V(光藕工作电压)注意:如果没有用C PU控制,小八接口(MCU-IN)的信号可以不接任何东西。

摘要:MC33991是Motorola公司生产的两相步进电机驱动器,可以准确地控制步进电机的运动并及时反馈步时电机的工作状态。
该电路有良好的抗干扰能力,可以灵活地控制驱动步时电机,是汽车电子设备特别是汽车仪表中的理想驱动器。
关键词:步时电动机驱动器SPIMC33991汽车仪表1MC33991的主要特点MC33991是单独封装、通过SPI(同步串行外设接口)进行通信、可同时控制二个步进电机的驱动电路。
该电路由4个可驱动线圈的功率H桥和辅助逻辑控制器组成。
每组H桥的驱动可用来控制步时电机的速度、旋转方向及每相线圈中电流的大小。
MC33991有良好的抗干扰能力,可以十分灵活地驱动步进电机,因此是汽车电子设备特别是汽车仪表的理想驱动器。
只要做一些外围设备的改进,该电路也可以仿照气隙磁通的运行,把普通电机转化为步进电机来控制。
MC33991的特性如下:•最小的上层处理器(不需其他外设即可直接驱动电机);•仿效普通电机的运动进行控制,使电机有完美的动态和静态性能;•有4096个静态指示位置;•最大指针扫过范围为340°;•最大指针速度为400deg/s;•最大指针加速度为4500deg/s2;•应用微步距控制技术(每步细分为12个微步);•指针回零校准;•有16位SPI;•内部时钟校准;•睡眠模式下的耗电量较小。
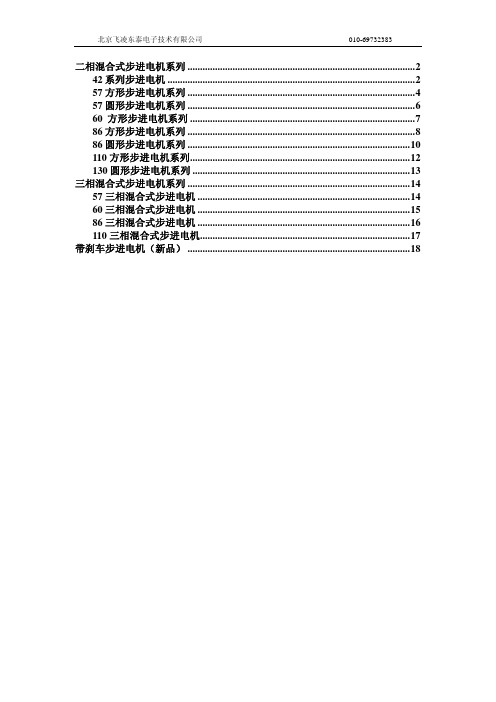
内韶晶撮GADMC33991的内部结构框图2结构原理与引脚功能2.1内部结构MC33991的内部结构框图如图1所示,它由PI 、逻辑电路、电压/温度检测及功率H 桥等模块组成。
MC33991主控电路先将驱动命令通过SPI 以串行数据的方式输出,再通过逻辑电路将命令转化成驱动信号以驱动功率H 桥,H 桥输出电流直接驱动步进电机,同时MC33991中的电压/温度等检测模块可以随时检测电机的动转状态,并将检测结果通过SPI 以串行输出方式将数据反馈给主控电路。
2.2引脚功能VnuC5SCL K 5051SP1RST-18T ICOSOt SINOj C0S1匚・»»■>中国事揃 遵理_!«样|z 章TRTZ压低检过及压测H 桥及-COSO+ -COSO- -SSNO+ SINO COS1+c osi-RTZ SINH SiKl-L24WideBodySOICThermaltyEnhancedleadFramehttpffj^^gstgUdqxomCOS+、COS-、SIN+与SIN-:H 桥输出端。

YKE2405M-2A数字型二合一步进驱动器使用手册版本:V1.0深圳研控自动化科技股份有限公司目录目录 (2)版本修订历史 (1)前言 (2)第1章概述 (3)1.1 产品介绍 (3)1.2 特性 (3)1.3 应用领域 (3)1.4 产品命名规则 (4)第2章性能指标 (5)2.1 电气特性 (5)2.2 使用环境 (5)第3章安装 (6)3.1 安装尺寸 (6)3.2 安装方法 (6)第4章驱动器端口与接线 (7)4.1 接线示意图 (7)4.2 端口定义 (8)4.2.1 状态指示灯 (8)4.2.2 控制信号输入/输出端口 (8)4.2.3 电源输入/电机输出端口 (9)4.3 输入/输出端口操作 (9)4.4 拨码开关设定 (11)4.4.1驱动器电流设置 (11)4.4.2驱动器细分设置 (11)4.4.3锁机电流设置 (12)第5章适配电机 (13)5.1 电机尺寸 (13)5.1.1 42mm两相开环电机 (13)5.1.2 57mm两相开环电机 (14)5.2 技术参数 (14)5.3 电机接线图 (15)第6章报警排除 (16)第7章一般故障排除方法 (17)第8章保修及售后服务 (18)8.1保修 (18)8.2售后服务 (18)YKE2405M-2A使用手册V1.0 版本修订历史版本修订历史YKE2405M-2A使用手册V1.0 前言前言感谢您使用本公司步进驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:第1章概述1.1 产品介绍YKE2405M-2A是基于全新一代32位DSP技术的高性能一拖二步进驱动器,驱动电压为DC 20V-50V,配备两路电机输入,可以同时适配电流连续输出在4.0A以内,法兰为42/57mm的两相开环步进电机,且适配不同电机时驱动器可通过拨码对电流和细分进行设置。

一、步进电机1、步进驱动器型号:步科Kinco 2M530 接线端子:脉冲信号(PLS+,PLS-), 方向信号(DIR+,DIR—);脱机信号(FREE+,FREE-);NC+,NC-(不用接) 。
接电机线A+(红色),A-(蓝色),B+(绿色),B-(黑色),GND(24V负极),V+(24V正极)8位DIP开关功能。
2、电机型号:2S56Q-02976,步距角1.8°,额定电流3A.(注电机带动小齿轮每转2圈,大齿轮带动轴承转1圈,即如细分为1,每给400个脉冲,轴承才转1圈。
)3、步进电机典型接线图4、参考程序二、无刷直流电机1、驱动器型号:森创BL-2203C.其特点是220V交流供电。
在使用时要调节调速电位器设定为最小值。
2、电机型号:森创92BL-5015H1。
500W, 1500rpm, 3.20Nm , 2.04A(可通过无刷电机控制板控制)注:霍尔电源霍尔信号、电机线S+(绿色) S-(黑色) SA、U(红)、SB、V(黄)、SC、W(蓝)3、 电机运行/停止控制(R/S )当“R/S”与端子“COM”断开时停止,反之电机运行。
4、 电机正反转控制(DIR )当“DIR”与端子“COM”断开时电机顺时针方向运行,反之则逆时针方向运行;为避免驱动器的损坏,在改变电机转向是应先使电机停止运动后再操作改变转向。
5、 电机转速信号输出(SPEED ) 驱动器通过端子SPEED-COM 提供与电机转速成比例的脉冲信号。
每转脉冲数=6×电机极对数,SPEED 频率(Hz )=每转脉冲数×转速(转/分)÷60。
1、 型号 日本安川V1000-0.4KW (特别要注意电源为单相电源220V ,第三个端不能接线)四、他励直流电机型号:110SZ02 123W 0.9A 220v 四个接线端子(S1 T1 T2 S2),其中S1、S2为电枢端子,电阻为30欧,T1、T2为励磁绕组,电阻为2100欧。

L298N中文资料步进电机驱动芯片L298中文资料双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver )L298中文资料L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。
L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路; OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图图10 L298 内部逻辑图L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值: Symbol符号Parameter 参数Value数值单位VSPower Supply 电源50VSSLogic Supply Voltage 电源电压7VVI,VenInput and Enable Voltage 输入电压和启用–0.3 to 7VIO峰值输出电流(每通道)非重复性(t= 100ms)3重复(80% on –20% off; ton = 10ms) 2.5直流运行2VsensSensing Voltage 感应电压–1 to 2.3VPtotTotal Power Dissipation (Tcase=75℃)总功率耗散(Tcase=75 ℃)25WTopJunction Operating Temperature 结工作温度–25 to 130℃Tstg,TjStorage and Junction Temperature 储存温度–40 to 150℃L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):PowerSONameFunction 功能说明1;152;19Sense A; Sense B 引脚电流监测端,1、15和PowerSO的2、19用法一样,SEN1、SEN2分别为两个H桥的电流反馈脚,不用时可以直接接地2;34;5Out 1; Out 21Y1、1Y2输出端46VS功率电源电压,此引脚与地必须连接100nF电容器 5;77;9Input 1; Input 21A1、1A2输入端,TTL电平兼容6;118;14Enable A; Enable BTTL电平兼容输入 1EN、2EN使能端,低电平禁止输出 81,10,11,20GNDGND地912VSS逻辑电源电压。
LV8729 24 28 39 42 步进电机驱动器说明书本步进电机驱动器专为微型步进电机使用,可以驱动24 28 39 42 等1.8A 电流以下混合式两相步进电机,具有很高的性价比。
本步进电机驱动器具有以下特点:1.支持整步,2、4、8、16、32、64、128、共8种细分模式。
上面的设置中,L代表拨码开关拨到ON的位置,H代表拨码开关拨到OFF 的位置.(备注:在1细分设置下,速度与力度是最高的,1/128设置是转速最低B+B-A-A+暂波频率设置,跳针全部插上为50KHZ,拨在一边是100KHZ电流调节散热器底下有4个M3螺丝柱,用于安装M1,2,3为细分设置开关。
M4为半流设置开+5VDIRPULENV+V-最平稳的)2.最大输出电流为1.8A,可以适配1.8A以内的各种2相小型步进电机,电流0.3-1.8A无级可调,任意设置。
电位器是无级的,电流刻度标记是供参考用的。
如果你的电机是0.5A的调到0.4A与0.6A刻度的中间即可。
3.输入工作电压为DC7-30V.配有电源指示灯。
4.输入电路有防电源接反设计,更安全。
5.有自动半流开/关功能,工作方式更多样。
为开关M4设置。
6.板上的跳针为暂波频率设置,插上为50KHZ,拨在一边是100KHZ.可以匹配不同电的工况时的噪声。
行业标准的输入输出接口,兼容性强,支持共阳共5V接线。
7.配有大型散热器,与安装固定柱,螺丝,使用更方便。
注意事项:1.驱动器匹配的电源容量最少都要有2A以上。
否则工作不稳定。
2.电机线不得AB相线交叉接,否则烧驱动器。
3.配PLC使用时,要加串2K左右限流电阻,否则烧驱动器。
附录:步进电机驱动使用注意事项1.关于电机驱动器电源的选用:每个驱动器的工作电源必须大于驱动器的最大驱动电流安数以上的容量。
平时工作作电流一般不是很大。
但电机在换向与启动时,一般电流会提升3-4倍左右或以上,视电机负载而定。
在选用电源时,要选用大容量的,浪涌冲击能力好的电源。
工程工业控制课程设计概述----------------------- -----------------------日期:目录1 机电一体化柔性装配系统概述- 3 -1.1系统基本组成- 3 -1.2 下料单元的介绍- 5 -2.上料单元PLC设计- 8 -2.1PLC简介- 8 -2.2控制方式说明- 9 -2.3I/O编号分配表- 10 -2.4功能表图错误!未定义书签。
2.5PLC程序说明- 11 -2.5.1上料单元初始原位程序- 11 -2.5.2步进电机的驱动程序- 16 -2.5.3启动、停止、手自动,复位按钮程序- 16 -3 .S7-300 PLC主站控制部分错误!未定义书签。
3.1PROFIBUS-DP总线介绍错误!未定义书签。
3.2主站控制的基本要求错误!未定义书签。
3.3 S7-300PLC介绍错误!未定义书签。
3.3.1 S7-300PLC概述错误!未定义书签。
3.3.2 S7-300PLC的组成错误!未定义书签。
3.4 S7-200与S7-300的PROFIBUS –DP通信错误!未定义书签。
3.4.1 配置主站硬件组态错误!未定义书签。
3.4.2软件编程错误!未定义书签。
3.5 S7-300PLC程序部分错误!未定义书签。
3.6 S7-300总结- 20 -4.监控软件的设计错误!未定义书签。
4.1监控软件的功能错误!未定义书签。
4.2登录界面的设置错误!未定义书签。
4.3监控界面错误!未定义书签。
4.4组态设计小结- 27 -1 机电一体化柔性装配系统概述Me093399型机电一体化教学系统是以工业生产中的自动化装配生产线为原型开发的教学、实验、实训综合应用平台。
本装置采用铝合金结构件搭建各分站主体设备,选取多种机械传动方式实现站间串联,整条生产线充分展现了实际工业生产中的典型部分。
系统控制过程中除涵盖多种基本控制方法外,还凸现组态控制、工业总线、电脑视觉、实时监控等先进技术,为培养现代化应用型人才创设了完整、灵活、模块化、易扩展的理想工业场景。
MC33991型二相步进电机驱动器
摘要:MC33991是Motorola公司生产的两相步进电机驱动器,可以准确地控制步进电机的运动并及时反馈步时电机的工作状态。
该电路有良好的抗干扰能力,可以灵活地控制驱动步时电机,是汽车电子设备特别是汽车仪表中的理想驱动器。
关键词:步时电动机驱动器 SPI MC33991 汽车仪表
1 MC33991的主要特点
MC33991是单独封装、通过SPI(同步串行外设接口)进行通信、可同时控制二个步进电机的驱动电路。
该电路由4个可驱动线圈的功率H桥和辅助逻辑控制器组成。
每组H桥的驱动可用来控制步时电机的速度、旋转方向及每相线圈中电流的大小。
MC33991有良好的抗干扰能力,可以十分灵活地驱动步进电机,因此是汽车电子设备特别是汽车仪表的理想驱动器。
只要做一些外围设备的改进,该电路也可以仿照气隙磁通的运行,把普通电机转化为步进电机来控制。
MC33991的特性如下:
·最小的上层处理器(不需其他外设即可直接驱动电机);
·仿效普通电机的运动进行控制,使电机有完美的动态和静态性能;
·有4096个静态指示位置;
·最大指针扫过范围为340°;
·最大指针速度为400 deg/s;
·最大指针加速度为4500deg/s2;
·应用微步距控制技术(每步细分为12个微步);
·指针回零校准;
·有16位SPI;
·内部时钟校准;
·睡眠模式下的耗电量较小。
2 结构原理与引脚功能
2.1 内部结构
MC33991的内部结构框图如图1所示,它由PI、逻辑电路、电压/温度检测及功率H桥等模块组成。
MC33991主控电路先将驱动命令通过SPI以串行数据的方式输出,再通过逻辑电路将命令转化成驱动信号以驱动功率H桥,H桥输出电流直接驱动步进电机,同时MC33991中的电压/温度等检测模块可以随时检测电机的动转状态,并将检测结果通过SPI以串行输出方式将数据反馈给主控电路。
2.2 引脚功能
COS+、COS-、SIN+与SIN-:H桥输出端。
它们分别是H功率桥中各个半桥的输出端。
H功率桥可以直接线性控制步进电机的二组线圈,使其在4象限中运动。
GND:接地端,包括与晶闸管相连的输出地及逻辑地,同时具备散热作用。
CS:片选输入端,与片选信号相连。
SCLK:串行时钟,该引脚与主控电路的时钟相连,决定串行外围接口的时钟频率的大小。
信号的占空比为50%,由CMOS电平驱动。
SO:串行输出端,该引脚与主控电路外围串行接口的输入端或者与其他驱动电路的串行输入端相连。
输出为CMOS电平,输出的数据为状态反馈信息或报错信息。
SI:串行输入端,该引脚与主控电路外围串行接口的输入端相连,接收主控电路提供的控制信号,SI 端在电路内部有上拉电阻器,要由CMOS电平驱动。
RTX:多元输出。
指针回零时要用此引脚。
VDD:电源输入端,为逻辑电路及SPI供电,电压为4.5~5.5。
RST:复位端,当主控电路要复位或者要使电路进入睡眠状态时,应将此引脚置0使电路回到默认状态。
该引脚在电路内部接有上拉电阻器。
VPWR:电池电压,电源输出端。
电压范围为6.5V~26.0V,工作电流小于6.0mA。
3 SPI的引脚及通信协议
SPI为同步串行外部设备接口,可以进行16位数据的双向传输,MC33991中有4个引脚:SI、SO、SCLK、CS与之相关。
其中SI与SO引脚遵循先入先出(FIFO)协议进行数据输入和输出。
所有输入引脚都需要5.0V 的CMOS驱动电平。
下面具体加以介绍:
片选端CS:是主控电路与MC33991进行通讯的使能端。
当CS为0时,MC33991型步进电机驱动器与主控电路传输数据。
MC33991在CS端输入信号的上升沿锁存输入数据,当CS为0时,输出端SO输出信号有效;当CS为1时,SI与SCLK引脚的输入信号被忽略,SO端为高阻状态。
只有当SCLK为0时,CS端的信号才可以由1转换为0,CS端在电路内部接上拉电阻器,专门控制I/O端口。
串行时钟输入端SCLK(同步时钟):SCLK端口为MC33991内部寄存器转换提供时钟信号。
在其下降沿SI的信号被转换到寄存器内部,在其上升沿同时SO的信号将寄存器中的数据转换成输出信号,SCLK引脚在电路内部接下拉电阻器。
串行输入端SI:SPI的输入端,串行输入信号在SCLK的下降沿被读取。
输入的数据为16位,从最高位(MSB)开始传输。
其他的多重数据信息(16位以后的数据)将被忽略,传输完16位数据后,在传输新数据之前CS必须置1。
当CS为高电平时,输入数据被忽略。
串行输出端SO:寄存器的输出端口,有3种状态(0、1、高阻)。
数据在SCLK信号的上升沿被输出,当CS为高电平时,SO引脚为高阻状态。
4 MC33991的寄存器
MC33991型驱动器可以与微处理器直接相连,并通过16位SPI进行数据传输,微处理器向驱动器输入控制数据,驱动器向微处理器输出反馈信息。
MC33991内部的寄存器及其功能如表1所列。
表1 MC33991内部寄存器
MC33991内部有6个寄存器,分别用来控制和记录4个H桥的输出状态,它们的地址由SPI所输入的16位数据中的15-13位来决定,主要功能如下:
(1)控制方面
·独立控制每个电机的工作;
·控制电源的升降;
·校准内部时钟;
·决定步进电机指针的位置和移动的速度;
·控制指针的回零校准。
(2)状态输出方面
·分别指示玩二个步进电机是否有过热现象;
·指示电池电压是否过高;
·指针回零状态指示;
·内部时钟状态指示;
·指示输出与指针运动是否相符。
在这6个寄存器中,能量、使能及校准寄存器(PECR)能够使主控电路独立控制每个步进电机驱动信号的输出或禁止。
同时还可以帮助校准电路的内部时钟,发出空指令以得到状态位的数据,还可以控制MC33991使其工作在“睡眠状态”。
最大运行速度寄存器(VELR)的第0-7位可以表示0-255个不同的数据,用来设定电机运行的最高速度,第8位和第9位分别用来控制是否将这一最大速度应用到各个步进电机上。
步进电机0/1的位置寄存器(POS0R/POS1R)可以分别确定0号步进电机和1号步进电机指针的位置。
寄存器的0-11位表示4096个不同的数据,从而使电机批易地的位置在0-4095之间变化。
回零寄存器(RTZR)的第0位决定是哪个电机回零,第1位为回零的使能位。
2-3位决定输出哪8位数据,第4位为决定是无条件回零还是自动回零,5-12位必须置0。
回零配置寄存器(RTZCR)用来设定指针回零需用的参数,主要包括每一整步所用的时间、速率及空白时间的大小。
空白时间指一相线圈断电与下一相线圈通电之间的延迟时间(512μs或768μs)。
该寄存器还可用来判断指针的状态是运动还是静止。
状态输出寄存器:当CS为低电平时,状态输出寄存器会把它其中的16位数据通过SO端输入到主控电路,为主控电路提供步进电机驱动及运行状况的信息。
此寄存器为只读寄存器。
其中15-8位和第7位用来指示内部时钟是否需要校准;第6位用来指示驱动电源电压是否正常;第5/4位用来指示在上一条指令
发出后1/0号步进电机的状态(正步/运动);第3/2位指示步进电机1/0是否处在回零状态;第1/0位指示步进电机1/0的温度是否正常。
图2和图3分别示出MC33991的输入、输出时序。