L298N步进电机驱动器使用说明
- 格式:pdf
- 大小:428.86 KB
- 文档页数:7
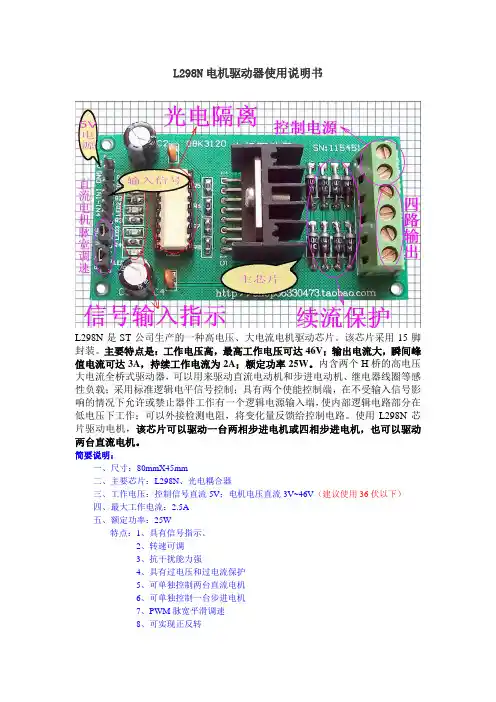
L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。

1.产品说明产品说明::本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
是智能小车必备利器。
:产品参数:.产品参数1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围(IN1 IN2 IN3 IN4):低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围(ENA ENB):低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度)12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明::图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制逻辑输入端与5V 电源输出端OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V。
【关键字】方式L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)如图:按CTRL并点击(L298N驱动器与直流电机接线图)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
L298N电机驱动模块
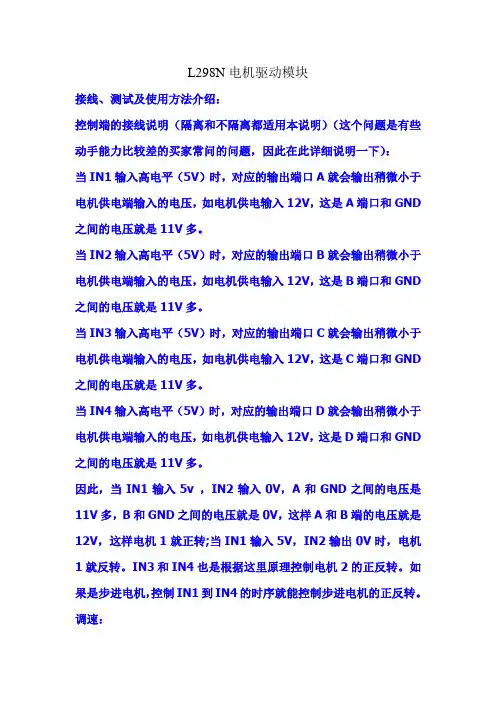
接线、测试及使用方法介绍:
控制端的接线说明(隔离和不隔离都适用本说明)(这个问题是有些动手能力比较差的买家常问的问题,因此在此详细说明一下):
当IN1输入高电平(5V)时,对应的输出端口A就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是A端口和GND 之间的电压就是11V多。
当IN2输入高电平(5V)时,对应的输出端口B就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是B端口和GND 之间的电压就是11V多。
当IN3输入高电平(5V)时,对应的输出端口C就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是C端口和GND 之间的电压就是11V多。
当IN4输入高电平(5V)时,对应的输出端口D就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是D端口和GND 之间的电压就是11V多。
因此,当IN1输入5v ,IN2输入0V,A和GND之间的电压是11V多,B和GND之间的电压就是0V,这样A和B端的电压就是12V,这样电机1就正转;当IN1输入5V,IN2输出0V时,电机1就反转。
IN3和IN4也是根据这里原理控制电机2的正反转。
如果是步进电机,控制IN1到IN4的时序就能控制步进电机的正反转。
调速:
如果不需要调速时将PWMB、PWMA和5V之间的短路帽插上,这样电机就会全速运行。
如果需要调速,取下PWMB、PWMA和5V之间的短路帽,在PWMB、PWMA端输入PWM信号来控制电机的转速。
步进电机出了可以输入PWM信号来控制步进电机的转速外还可以控制输入时序来控制。
L298N步进电机驱动器使用说明L298N步进电机驱动器是一款广泛应用于步进电机控制的驱动器模块。
它采用双向电机驱动桥芯片L298N,可以提供高电流和高电压的驱动能力,适用于同步马达和双向直流电动机的控制。
以下是L298N步进电机驱动器的使用说明。
一、硬件连接1. 将L298N模块与Arduino主控板连接。
将L298N模块的5V和GND引脚分别连接到Arduino的5V和GND引脚。
2.将步进电机的4根线分别连接到L298N模块的输出端子A、A-、B和B-。
相应的线连接方式为:步进电机的A相线连接到L298N模块的A端子,A-相线连接到A-端子,B相线连接到B端子,B-相线连接到B-端子。
二、编码下面是一个简单的Arduino代码示例,用于控制步进电机的运动。
代码将使步进电机按指定的方向和速度旋转。
```cpp#include <Stepper.h>//设定步进电机的步数和引脚const int stepsPerRevolution = 200;Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);void setu//设置步进电机的速度myStepper.setSpeed(60);void loo//顺时针旋转一圈myStepper.step(stepsPerRevolution);delay(1000);//逆时针旋转一圈myStepper.step(-stepsPerRevolution);delay(1000);```三、常见问题解答1.如何改变步进电机的转向?需要根据具体的控制电路和驱动器设计,通过修改引脚的输出顺序或改变控制信号的频率来改变步进电机的转向。
2.怎样确定步进电机的旋转速度?可以使用`myStepper.setSpeed(speed)`函数设置步进电机的转速,其中speed的单位是步/分钟。
具体的速度可以通过试验和调节来确定。

l98n电机驱动模块详解(总7页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)5.光电隔离(抗干扰)6.核心芯片(L298N)4.控制信号指示灯7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
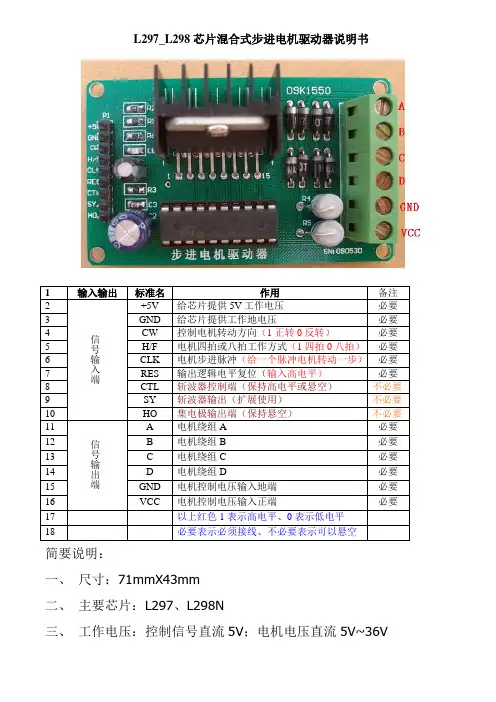
L297_L298芯片混合式步进电机驱动器说明书1输入输出标准名作用备注2信号输入端+5V 给芯片提供5V工作电压必要3GND 给芯片提供工作地电压必要4CW 控制电机转动方向(1正转0反转)必要5H/F 电机四拍或八拍工作方式(1四拍0八拍)必要6CLK 电机步进脉冲(给一个脉冲电机转动一步)必要7RES 输出逻辑电平复位(输入高电平)必要8CTL 斩波器控制端(保持高电平或悬空)不必要9SY 斩波器输出(扩展使用)不必要10HO 集电极输出端(保持悬空)不必要11信号输出端A 电机绕组A 必要12 B 电机绕组B 必要13 C 电机绕组C 必要14 D 电机绕组D 必要15GND 电机控制电压输入地端必要16VCC 电机控制电压输入正端必要17以上红色1表示高电平、0表示低电平18必要表示必须接线、不必要表示可以悬空简要说明:一、尺寸:71mmX43mm二、主要芯片:L297、L298N三、工作电压:控制信号直流5V;电机电压直流5V~36V四、最大工作电流:2.5A五、额定功率25W特点:1、具有电源指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制一台步进电机【参考程序】#include<reg52.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型sbit CW=P1^0; //控制步进电机的方向sbit H_F=P1^1; //控制步进电机的工作方式(1为四拍工作方式,0为八拍工作方式)sbit CLK=P1^2; //控制步进电机的转动速度,一个脉冲电机转动一个步进角。
sbit RES=P1^3; //使能控制(为1时电机运行,为0时电机停止)/*********************************************************************/void delay(uint i)//延时函数{uint j,k;for(j=0;j<i;j++)for(k=0;k<150;k++);}/*********************************主函数************************************/ main(){CW=1; //为1时电机正转,为0时电机反转H_F=0; //1为四拍工作方式,0为八拍工作方式CLK=1; //脉冲输出初始值RES=1; //为1时电机运行,为0时电机停止while(1){CLK=!CLK; //产生脉冲delay(1); //控制速度(改变括号内的阿拉伯数字可以改变转速)《数字越小电机转动越快》}}。
1.产品说明产品说明::本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
是智能小车必备利器。
:产品参数:.产品参数1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围(IN1 IN2 IN3 IN4):低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围(ENA ENB):低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度)12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明::图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制逻辑输入端与5V 电源输出端OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V。
L298N电机驱动器使用说明书之欧侯瑞魂创作注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采取15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采取尺度逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变更量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流呵护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采取光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,坚持此状态)(L298N)(抗干扰)实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转酿成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机发生。
L298N电机驱动模块详解(总7页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)5.光电隔离(抗干扰)6.核心芯片(L298N)4.控制信号指示灯7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
L298N 电机驱动器使用说明书[温馨提示温馨提示]]在使用本产品前,请仔细阅读本使用说明书,这样您在使用中遇到问题时,也许可以通过本说明书就能解决;请妥善保管本说明书,以备日后参考;本册外观图片仅供参考,请以实物为准。
[注意事项注意事项]]本产品为直流电源供电,请确认电源正负极正确后上电; 请勿带电插拔连接线缆;此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物; 储存和使用时请注意防潮防湿;第一次上电时观察绿色电源指示灯是否点亮,如果不亮,请立即断电和我们联系,或检查电源是否接反。
板上有个5V 备用输出插备用输出插针针J4J4,,只是输出给单片机等系统板使用,千万不能从这里引入外部电源千万不能从这里引入外部电源,,否则可能烧坏否则可能烧坏驱动板驱动板驱动板稳压稳压芯片78M05。
您需要的话可以自己焊接您需要的话可以自己焊接,,默认不焊接默认不焊接。
驱动器为功率设备,请保持工作环境的散热通风;在连上电机后使其连续工作一段时间后观察电机和驱动芯片的温升正常后方可进行后续使用,如果电机或驱动芯片(L298N)温度过高请和我们联系。
[主要主要功能特点功能特点功能特点]]关键芯片:L298N 双H 桥直流/步进电机驱动芯片L298N 芯片工作电压:DC 4.5~5.5V 。
电机驱动电源电压DC 6--35V 。
电源输入正常时有LED 灯指示。
最大输出电流2A (瞬间峰值电流3A ),最大输出功率25W 。
输入控制有光耦隔离,抗干扰能力强。
输出正常时电机运转有LED 灯指示。
具有二极管续流保护。
可单独控制2台直流电机或1台两相4线(或6线)步进电机。
可以采用并联接法控制一台高达3A 的直流电机。
可实现电机正反转。
直流电机转速可通过PWM 方式实现调速。
可以输出5V 电源。
[控制接口说明控制接口说明]]本驱动器控制接口采用光耦共阳极接法实现隔离功能,因此在驱动器上不需要连接控制端的地,控制时是通过控制端的地形成回路的,也避免了控制地和驱动地共地造成电机启动对控制的干扰;只要把控制端的电源正(一般有+3.3V 、+5V 、+12V 、+24V 等等)接在驱动器端口J2的VCC 上即可。
L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A’-B’)通电控制脉冲必须严格按照这一顺序分别控制A,B相的通断。
L298N电机驱动器使用说明兴创科技是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流~;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。